
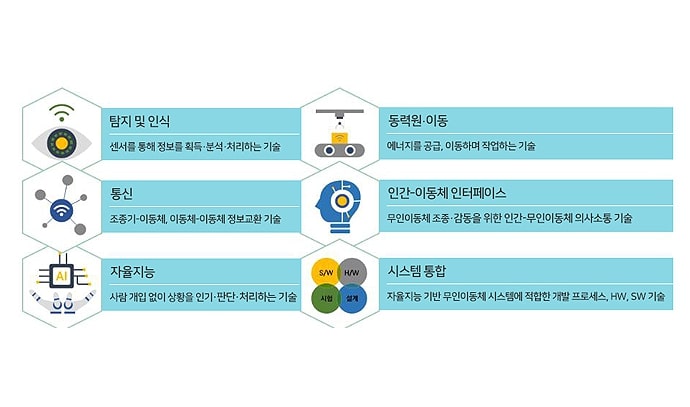
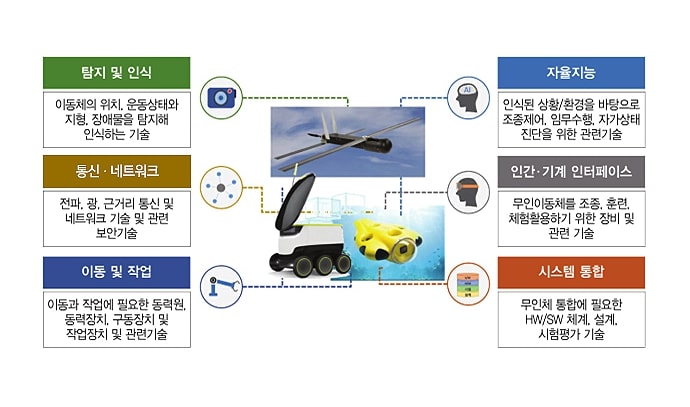
임무 맞춤형 고성능 무인이동체 개발 및 다수·이종 간 상호 운용성 확보 등을 위해 육·해·공 무인이동체에 공통으로 적용할 수 있는 6대 무인이동체 공통 원천기술을 개발하고 있다. 공통 원천기술은 획득 및 분석·처리, 조종기-이동체, 이동체-이동체 간 정보교환 기술, 상황 인지·판단·처리 기술, 에너지를 공급하고 이동하며 작업하는 기술 등이다.
한국항공우주연구원은 이를 위해 실내·非가시권 등 운용을 위한 탐지 및 인식의 정밀 항법·항행 기술을 개발하고, 기술력이 열악한 이동체용 통신 분야의 원천기술 확보에 주력하는 동시에 불법행위 방지 기술 개발을 통한 통신의 운용 안전성·신뢰성을 제고한다.
또한, 무인이동체 스스로 상황을 판단하고 임무를 수행하기 위한 상황인식 기술 등을 우선 개발하고 이동체 간 협력 기술도 장기적 목표로 개발하며(자율지능), 무인이동체용 경량·고효율 전기구동장치 개발 및 서로 다른 동력원 간 결합을 통한 분산전기추진시스템 등 동력원 및 이동의 신개념 기술 개발에 나서고 있다.
이와 함께 상호작용 정도에 따라 조종·감독·협업 단계로 구분하고 조종방식 개발에서 협력 기술 개발로 순차적 추진하며(HMI) 무인이동체에 자율지능 등 신기술을 쉽게 적용·검증할 수 있는 개발체계 연구와 시스템 통합을 위한 신개념의 무인이동체 하드웨어를 개발하고 있다.