
무인비행체 기술의 발전에 따라 민수와 공공분야 활용이 증대되고 비행 수요가 급격히 증가함에 따라 항공교통의 효율성과 안전성을 제고하기 위한 새로운 제도와 기술 개발을 요구받고 있다.
한국항공우주연구원은 저고도 교통관리 체계를 위한 보안 및 무인비행장치 핵심기술을 개발하고 있다. 복수의 비행장치의 효율적이고 안전한 활용을 위한 교통관리체계 기술 실증을 위한 정밀항법 기술 개발을 통한 저고도 공역의 교통관리 체계 실증이 주요 목표이다.
또한, 무인비행장치 간 직접 정보교환을 위한 탑재장치를 개발하고, 교통관리 체계 보안기술을 통해 교통관리 체계의 해킹 방지 및 비인가 무인비행 장치의 탐지 및 불법 행위 억제기술을 개발하고 있다.
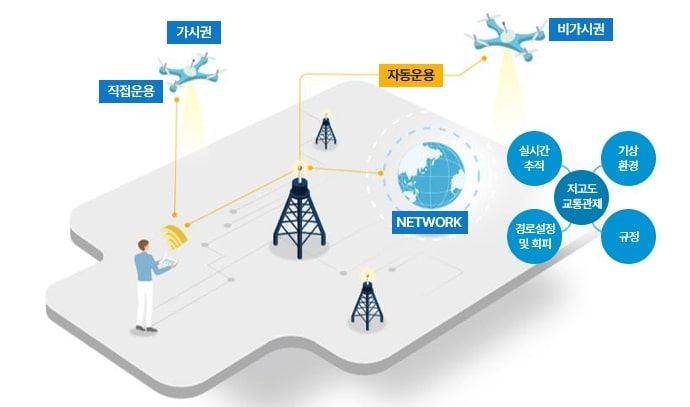
저고도 교통관제 시스템을 구성하려면 무인기 조종자 및 사용사업자 등록 시스템, 무인기를 추적 감시하고 교통흐름을 관리할 클라우드 기반의 중앙 컴퓨터 시스템, 개인이나 사용사업자 등 무인기 운용자가 언제 어디서나 접속하여 비행계획을 제출하고 승인받을 수 있게 해 주는 사용자 접속 시스템, 드론과 교통관리 시스템을 연결할 드론 교통관리용 무선통신망이 필요하다.
무인비행체 안전 운용을 위한 저고도 교통관리체계 개발 및 실증시험 연구개발 사업은 2017년 4월에 착수하여 현재 2단계 사업이 진행 중이다. 2020년에는 2단계 중간 성과로 보안 기능이 탑재된 LTE 통신 모듈을 탑재한 9대의 소형 드론들의 정밀항법 비행을 실증하였다. 2단계인 2022년 말까지는 비가시권 다수의 드론 비행과 공역관리, 교통관리를 하는 클라우드 기반의 시스템 기술을 선보일 계획이다.