

무인이동체는 사람의 도움없이 스스로 외부환경을 인식해 상황을 판단하고 임무를 수행하는 이동체로 드론이 대표적입니다. 농업, 영상 촬영, 맵핑, 재난안전 대응, 배송, 군집드론쇼, 군사용 감시정찰 등 많은 분야에서 새로운 성장동력을 창출하고 있습니다. 한국항공우주연구원 무인이동체사업단은 무인이동체 수요급증에 대응하기 위해, 다양한 종류의 무인이동체에 공통으로 적용할 수 있는 무인이동체 공통원천기술과 육해공 복수환경에서 여러 대의 서로 다른 무인이동체가 서로 협력하여 임무를 수행할 수 있는 기술을 개발하고 있습니다. 이를 통해 차세대 무인이동체 시장을 선점할 수 있는 혁신적 원천기술을 확보하고 기술경쟁력을 높이고자 합니다.
한국항공우주연구원은 무인이동체 기업이 지속적으로 늘어나고 있는 만큼 사업 추진 중에 기업의 기술이전 수요를 정기적으로 발굴하여 기술이전 대상을 점진적으로 확대하고 있습니다. 과기부를 비롯하여 우주항공청, 국방부 및 방사청, 중기부, 산업부, 국토부 등 타 부처에서 추진하는 상용화, 기술사업화, 창업지원 사업, 국방사업 등과 연계하여 사업의 원천기술이 제품 및 서비스로 구현되도록 지원하고 있습니다. 고차원적인 지능형 임무 수행이 가능한 무인이동체의 수요가 급성장하고 있어, 운용 환경의 제약을 극복할 수 있는 다양한 통합운용 기술을 개발하고 보급하여 국내 무인이동체 글로벌 경쟁력을 강화하겠습니다.

한국항공우주연구원 무인이동체원천기술개발사업단은 혁신적인 무인이동체 원천 기술 확보 및 기술 경쟁력 제고를 위해 육·해·공 공통 적용가능한 원천 기술을 개발하고 다수 이기종간 자율 협력을 통한 통합 운용체계를 구현합니다.
차세대 무인이동체 시장선점을 위한 혁신적 원천기술 확보 및 기술경쟁력 제고
2020.6 ~ 2027.5(7년) 1단계(20~22) / 2단계(23~27) 1,495.4억원(국비)
육·해·공 무인이동체에 직접 적용 가능한 공통 부품기술과, 원천기술을 공유해 무인이동체별 전용부품을 개발하는 공통기반기술 개발
새로운 무인이동체 시스템의 유효성을 입증하고, 운용시험을 통해 성능을 검증하며, 개발방법론 및 적용기술의 적절성 실증


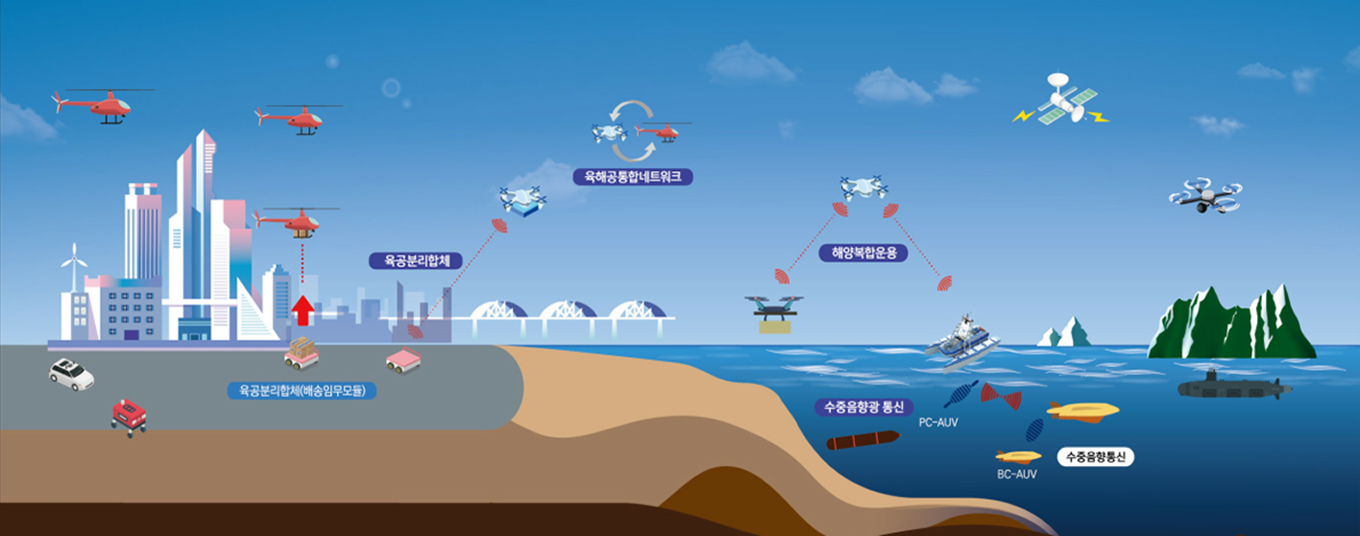
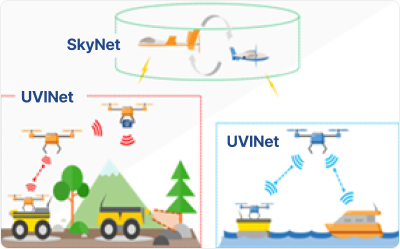
한국항공우주연구원은 무인이동체 공통원천기술 개발(육·해·공 무인이동체 전반에 공통으로 적용·활용 가능한 6대 분야 원천기술 개발) 및 통합운용 기술실증기 개발(개발된 공통원천기술 적용 및 검증을 위해 다수·이종 간 자율협력·육공복합·해양복합 무인이동체 통합운용체계 개발) 사업을 진행하고 있습니다.
| 구분 | 기술정의 | 추진전략 |
|---|---|---|
| 탐지인식 | 센서를 통한 외부정보 획득·분석·처리 | (항법연구단)실내·비가시권 운용 위해 정밀항법, 항행기술 및 탐지회피기술 개발 |
| (센서연구단)실내·비가시권 운용 위해 임무장비 성능향상 및 신호처리기술 개발 | ||
| 통신 | 조종기-이동체, 이동체 상호 정보교환 | (연구단)高 신뢰성 제어용·임무용 통신 및 통신보안기술 개발 |
| 자율지능 | 이동체 스스로 상황 인지·처리 | (연구단)자율 임무를 위한 지능형 알고리즘 및 다수·다종 간 협업기술 개발 |
| 동력원 | 전기동력 기반 구동시스템 | (과제)고출력 전동기, 에너지 관리시스템, 분산전기추진 시스템 개발 |
| HMI | 인간-이동체 의사소통 기술 | (연구단)인간 한계 및 기술수준을 고려한 협력기술 개발 |
| 시스템 통합 | 무인이동체 개발 프로세스, HW | (HW연구단)다기능/생체모방형 구조적용 및 3D 프린팅 활용기술 개발 |
| (과제)신기술을 쉽게 적용·검증할 수 있는 개발체계 및 통합설계 SW개발 |
 육해공 영역통합
육해공 영역통합
이종환경간 통합운용을 위한 기술기반 구축
 정밀협업
정밀협업
이기종간 분리합체 등 정밀협업기술 개발
 영역확장
영역확장
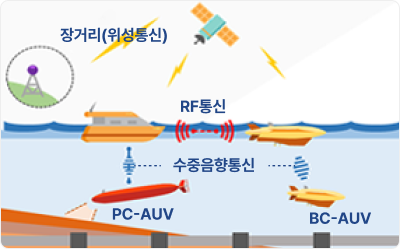
수상·수중 등 협업공간 확장