

글로벌 시장을 주도할 미래 기술·사회적·문화적 변화를 반영한 차세대 무인이동체 기술을 개발하고 있다.
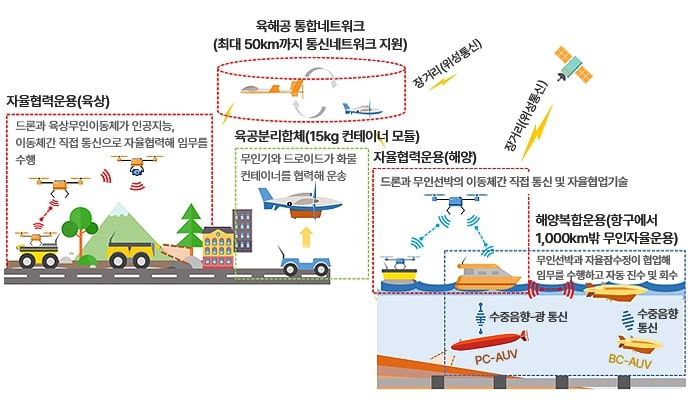
자율협력형 무인이동체 연구를 통해 육해공 영역에서 이종환경간 통합운용을 위한 기술기반을 구축한다. 육상, 해양, 공중의 무인이동체는 지상이나 해상의 고정된 통신 인프라에 의존하지 않고, 이종의 무인이동체간 직접 통신을 통해 네트워크를 구성하며, 자율지능형 군집운용 기술에 의해 부여받은 공통적인 임무를 인간 운용자의 도움 없이 무인이동체간 협력하여 수행한다.
육공복합형 무인이동체 연구를 통해 이기종간 분리합체를 포함한 정밀협업기술을 개발한다. 육상과 공중의 무인이동체는 도킹-언도킹 복합운용을 통해 24시간 자율 무인배송 시스템 구축과 같은 임무가 가능하다. 장거리 운송용 무인항공기는 수직이착륙 및 고정익 모드 순항이 가능하고, 단거리 배송용 육상 드로이드는 도심 내 자율주행을 통한 최종 목적지 배송이 가능하다.
해양복합형 무인이동체 연구를 통해 수상과 수중에서 통합운용되는 기술을 개발한다. 무인선과 동력형 무인잠수정, 부력형 무인잠수정으로 구성되며, 무인선과 무인잠수정간 진수 및 회수 기술, 다중 통신 네트워크 구성, 장기간 운용을 위한 수소연료전지 하이브리드 동력원, 해양 무인이동체간 자율협업기술 등을 개발하며, 이를 통해 수상-수중 광역 복합 임무 수행이 가능하다.