





01
달 탐사의 새로운 패러다임, 우주 로보틱스
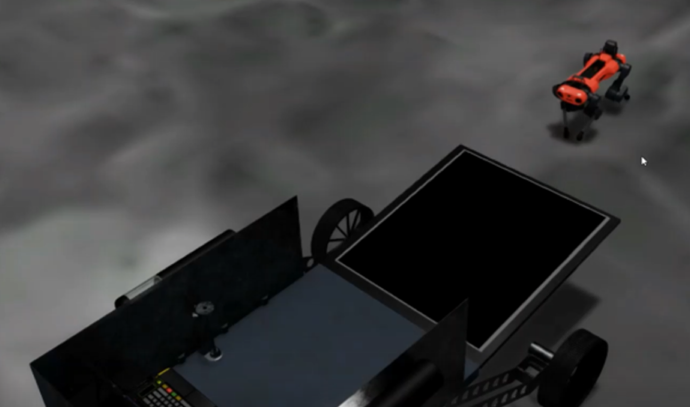
달 탐사와 기지 건설을 위한 무인 로봇 기술은 세계적으로 주목받고 있다. 현재 사용되는 로버(Rover)는 주로 바퀴형이지만, 미래에는 4족 로봇이나 인간형 로봇 같은 다양한 형태가 활용될 예정이다. 우주탐사연구센터는 3D 시뮬레이션을 통해 다양한 우주 로봇의 개념을 연구하며 월면 생존 시스템의 모사를 통해 실현 가능성을 검증하고 있다.
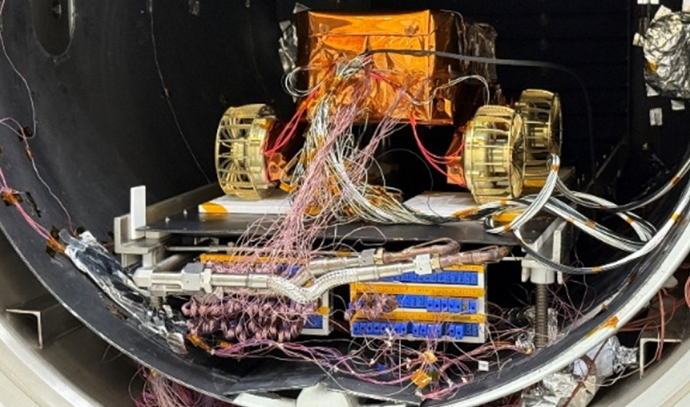
달에서 로봇은 진공 상태와 극단적 온도 환경(-180℃~130℃)을 견뎌야 하며, 발사 진동에도 강건하고 가벼워야 한다. 최근 그래핀(Graphene)과 맥신(MXene) 같은 2차원 나노 재료가 우주 시스템 적용 소재로 각광받고 있다. 본 센터는 이러한 첨단 나노 재료를 시험할 수 있는 구조열 모델(STM, Structural Thermal Model)을 개발하고, 이를 달과 유사한 환경에서 테스트하여 재료의 성능을 검증하고 있다. 앞으로 다양한 소재의 적용과 시험을 통해 달 탐사 로봇의 기술적 성장을 이루어 나갈 계획이다.


02
극한 환경을 개척하기 위한, 생명유지 환경제어 시스템
생명유지 환경제어 시스템(Environment Control & Life Support System, ECLSS)는 유인 우주선, 달/화성 우주기지, 우주정거장, 선외 우주복 등에 적용되는 시스템으로 우주에서 우주인이 거주하기 위한 압력, 온도/습도 환경을 조성하고 우주인에게 필수적인 자원인 공기와 물을 공급한다.
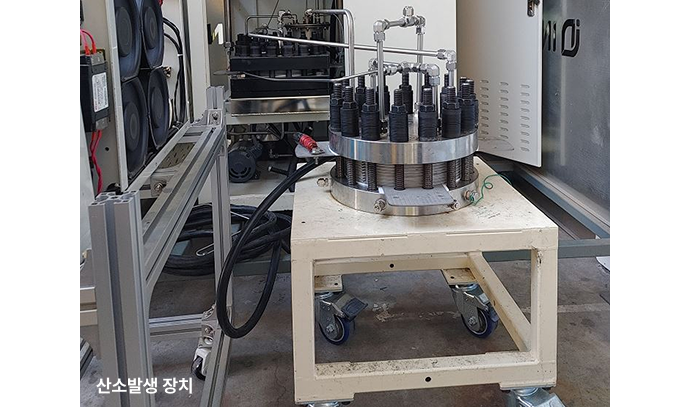
또한, 밀폐환경에서 발생하는 폐기물 등의 처리 및 재활용을 통해 우주 시스템 내 폐순환(Closed Loop System)을 구축하여 시스템 효율성을 높인다. 현재 우주탐사연구센터에서는 ECLSS 중에서 산소공급과 이산화탄소제거 및 공기정화 등을 위한 공기관리시스템을 연구 중에 있다.
본 연구를 기반하여 해저공간 창출 및 활용 기술개발 과제(해양수산부R&D, 주관기관: 한국해양과학기술원)의 공동연구기관으로 참여하여 수심 30m 해저 공간 플랫폼에 적용되는 공기관리시스템을 개발 중에 있으며, 밀폐된 환경의 플랫폼 내 폐순환 구조의 공기환경에서 승무원의 호흡을 위해 수전해 시스템을 통해 산소 공급과 호흡에 의한 부산물 이산화탄소 처리, 선내 공기질을 관리 등의 기능을 수행한다. 해저의 밀폐된 환경에서 실증 연구를 기반으로 향후 유인우주 활용된 ECLSS 개발에 활용하고자 한다.