
홍보 비주얼 슬라이더


01 / 07
Aviation항공
항공 산업은 기술집약형 산업으로, 컴퓨터, 정밀 기계, 통신전자 및 신소재 등 첨단기술이 응용되고 타 산업으로의 파급 효과가 큰 기술선도형 산업이다.

03 / 07
Space Launch Vehicle발사체
미국과 러시아는 1950년대부터 우주발사체 기술을 확보했다. 뒤이어 유럽, 일본, 중국, 인도 등도 우주발사체 기술을 확보해 인공위성과 우주탐사선 발사, 우주화물 수송 등 우주개발을 추진하고 있다.

04 / 07
Lunar Exploration달탐사
유럽, 중국, 일본, 인도 등 우주 선진국들은 물론 최근에는 혁신과 도전, 새로운 기회로 상징되는 뉴스페이스(New Space) 시대에 민간 스타트업 까지도 달탐사 등 우주탐사에 참여하고 있다.

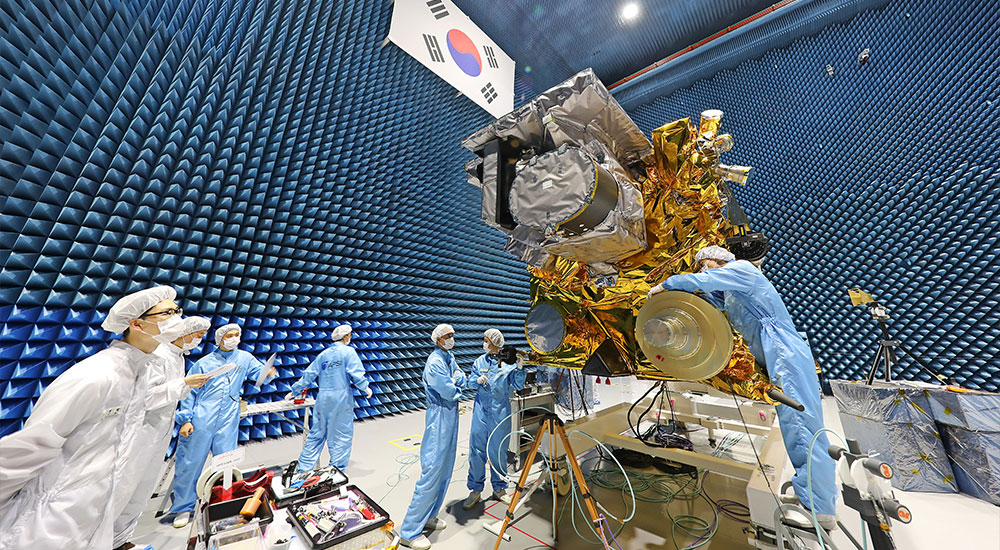
05 / 07
Use of satellite information위성활용
한국항공우주연구원은 국가 위성자산인 아리랑위성과 천리안위성 등을 성공적으로 관제운영하고 있으며, 앞으로 다중 위성시대에 대비해 국가 위성정보를 통합적·체계적으로 관리하고 활용해 나갈 계획이다.

06 / 07
Satellite Navigation위성항법
우리가 흔히 GPS(Global Positioning System)로 알고 있는 위성항법시스템은 위성을 통해 위치(Positioning) 및 항법(Navigation), 시각(Timing) 정보(통칭 PNT 정보)를 제공해주는 시스템이다.

07 / 07
Unmanned Vehicle무인이동체
무인이동체는 사람의 도움없이 스스로 외부환경을 인식해 상황을 판단하고 임무를 수행하는 이동체로 드론이 대표적이다.

Share News
KARI의 최신 동영상 및 이미지 정보를 안내 드립니다.





