차세대 항공 핵심기술로 미래 항공 산업 주도
항공
항공 산업 발전을 위한 첨단 항공기 개발
항공 산업은 기술 집약형 산업으로, 컴퓨터, 정밀 기계, 통신전자 및 신소재 등 첨단기술이 응용되고 타 산업으로의 파급 효과가 큰 기술 선도형 산업이다. 한국항공우주연구원은 고부가가치 창출이 가능한 항공 산업 발전을 이끌어내기 위해 기술 수준 향상과 독자 기술개발 기반 구축에 주력하고 있다. 한국항공우주연구원은 국내 기술로 4인승 소형항공기 ‘반디호’, 헬기 기술 자립화를 위해 한국형헬기개발사업(KHP)에 적용할 민군 겸용 핵심 구성품 18종을 성공적으로 개발했다. 이로써 우리나라는 세계 11번째 헬기 개발 국가가 되었으며, 관련 기술은 군용·민수용 헬기 개발에 파생되었다. 한국항공우주연구원은 항공 기술의 해외 진출을 위해 미국과 항공안전협정(BASA, Bilateral Aviation Safety Agreement)을 체결했으며, 국제적 항공안전인증규정에 따른 소형항공기(KC-100) 인증기도 개발했다.친환경·고효율 항공 기술과 교통 혁신 가져올 개인항공기 개발
최근에는 항공기의 경제성과 안전성, 효율성을 강화하기 위한 친환경·고효율 항공 기술과 무인기 개발 경쟁이 뜨겁다. 무인기는 군사적 용도로 개발이 시작되었지만, 최근에는 과학기술, 교통, 통신, 물류, 구조, 항공촬영, 농업 등 다양한 민간 분야로 확대되고 있으며, 미래 항공산업과 시장의 성장을 주도할 것으로 예상된다. 항공 및 방위산업 전문 컨설팅업체(Teal Group)에 따르면 무인항공기 시장 규모는 2023년 125억 달러로 증가하고, 이 중 민수 분야 시장 규모는 8억 8,000만 달러로 연평균 35%의 높은 성장세를 보일 것으로 전망된다. 무인기는 항공 기술과 IT 기술의 융합 시스템이라는 점에서 우리나라의 유망 분야로 우리나라는 현재 세계 7위권의 무인기 기술 경쟁력을 가진 것으로 평가되고 있다. 우리나라는 2023년까지 세계 5위, 2027년 세계 3위권 무인기 산업국 진입을 목표로 한다. 한국항공우주연구원은 세계 무인기 산업의 틈새를 공략할 수 있는 첨단 무인기 와 항공기술과 정보통신(IT) 기술의 융합으로 미래 교통 혁신을 가져올 개인용항공기(PAV) 개발을 추진하고 있다. 한국항공우주연구원은 소형 장기체공형 무인기 ‘두루미’를 시작으로 장기체공이 가능한 LTA(Lighter Than Air) 항공기 시스템, 중형 에어로스탯 시스템을 개발했다. 그리고 수직이착륙과 고속비행이 모두 가능한 틸트로터‘스마트 무인기’를 세계 두 번째로 개발했다. 이후 스마트무인기 관련 기술을 산업체에 이전하였고 함상 자동이착륙 기술, 틸트덕트 무인기, 쿼드틸트프롭 무인기 등 다양한 파생 기술을 개발해 틸트로터 무인기의 상용화와 미래형 항공기 및 차세대 비행체에 활용할 예정이다. 한국항공우주연구원은 성층권에서 장기 체공할 수 있는 성층권 태양광 무인기 (EAV, Electrical Aerial Vehicle)와 국민 안전을 지키고 재난·재해에 대응할 수 있는 다양한 형태의 재난치안용 무인기와 운용 시스템도 개발했다. 현재 한국항공우주연구원은 무인기를 비롯해 자율주행차, 자율운항선박 등 혁신적인 무인이동체를 발굴과 원천기술 개발을 위해 무인이동체 미래선도핵심기술개발을 추진하고 있다. 또한 새로운 항공 교통 혁신을 가져올 미래형 유무인 겸용 개인항공기(OPPAV, Optionally Piloted Personal Air Vehicle) 핵심 기술 개발, 무인기의 안전하고 효율적인 비행을 위한 저고도 무인비행장치 교통관리시스템(UTM, Unmanned Aerial System Traffic Management)과 민간 무인기 영역에서 무인기의 무인기 활용을 넓히기 위한 소형무인비행기 인증기술을 개발하고 있으며, 스스로 공중 충돌 위험성을 판단, 회피할 수 있는 무인기 충돌회피 시스템을 연구개발하고 있다.무인기
도심용 항공 모빌리티(UAM) 시장 경쟁 치열
전 세계적으로 도심용 항공 모빌리티(UAM, Urban Air Mobility) 시장 선점을 위한 전기 동력 수직이착륙(eVTOL, electric Vertical Takeoff & Landing) 개인항공기(PAV, Personal Air Vehicle) 개발 열풍이 치열하다. 개인항공기(PAV)는 지상의 교통체증 없이 신속한 이동이 가능해 차세대 미래교통혁명의 핵심으로 주목을 받고 있다. 새로운 교통체계로써 개인항공기(PAV)는 이동 속도와 시간을 획기적으로 단축으로 지상 교통수단 증가에 따른 막대한 사회적 비용을 절감할 수 있을 것으로 기대하고 있다.도심 항공 모빌리티용 개인항공기 기술검증 비행시제기 개발 착수
우리나라도 전기 동력 수직이착륙이 가능한 미래형 유무인 겸용 개인항공기(OPPAV, Optionally Piloted Personal Air Vehicle) 시장 선점을 위해 기술 개발에 착수했다. OPPAV는 Optionally Piloted Personal Air Vehicle(유무인겸용 개인항공기)의 의미하는 동시에 KARI가 주관하여 개발하는 eVTOL의 의미하기도 한다. 2019년부터 국토교통부/산업통상자원부 부처협업과제로 항우연이 주관하고, 국내 기업체(KAI, 현대차, 한화시스템, 베셀에어로, KAT, 두타, 이디티, 리얼타임웨이브), 연구기관(항공안전기술원, 교통연구원), 대학(건국대)가 참여하는 컨소시엄을 구성해 기술검증용 비행시제기와 인증/안전운항 핵심 기술을 개발하고 있다. 산업통상자원부는 분산전기추진시스템 및 자동비행시스템 기술검증을 위한 순항속도 시속 200km/h 이상 1인승 급 수직이착륙 방식의 유무인 겸용 비행시제기 및 지상통제시스템 개발 사업을 담당한다. 국토교통부는 미래형 전기 동력 수직이착륙 개인항공기의 인증기술 및 자동비행제어시스템을 개발 사업을 담당하는데 두 사업 모두 한국항공우주연구원이 주관기관으로 선정되어 사업을 주도한다. 21년 6월 OPPAV 44% 축소형 비행체의 천이비행시험에 성공하였으며, 2023년 OPPAV 기술검증용 시제기의 초도비행을 목표로 연구개발을 수행하고 있다.- 전장6.15m
- 날개폭7m
- 순항속도시속 200㎞/h
- 최대속도시속 240km/h
- 최대이륙중량650㎏
- 유상항중100kg급
- 탑승인원1인승
- 항속거리50km 이상
4개의 로터로 헬리콥터처럼 이륙
미래형 개인항공기(PAV, Personal Air Vehicle) 시장에 대비하기 위해 이미 확보한 틸트로터 기술을 바탕으로 로터가 4개 달린 쿼드틸트프롭 무인기(QTP-UAV)를 개발했다. 쿼드틸트프롭 무인기(QTP-UAV)는 1개의 전기배터리와 4개의 전기모터 및 프롭으로 구성된 분산전기추진 방식의 무인기이다. 전기 배터리가 여러 개의 모터에 동력을 공급하기 때문에 시스템이 단순하고 4개 로터의 회전수 제어를 통해 비행 안정성을 높일 수 있다.
쿼드틸트프롭 무인기(QTP-UAV)는 이착륙 시 4개의 로터가 헬리콥터처럼 수직 방향으로 위치해 있다가 이륙 후 비행 시에는 일반 고정익 항공기처럼 동체와 수평을 이루기 때문에 고속비행이 가능하다. 쿼드틸트프롭 무인기(QTP-UAV) 개발 시 중요한 핵심기술은 여러 개의 로터를 동시에 제어해 이착륙과 비행 시 비행체 자세를 안정적으로 유지하는 자세제어 기술과 전기 배터리에서 여러 개의 파워 라인을 통해 각 모터에 전력을 고르게 보내는 전력제어 기술이다.
쿼드틸트프롭 무인기(QTP-UAV)는 2016년부터 2018년까지 2년간 주요사업을 통해 개발했다. 체계종합에서는 무인기 시스템을 설계하고, 비행체 사이징, 성능해석, 형상설계, 프롭 및 틸트 계통에 대한 하중해석과 체계통합 지상 및 비행시험을 수행했다. 추진분야에서는 엔진, 발전기, 배터리로 구성된 하이브리드 시스템을 개발했으며, 제어분야에서는 비행제어시스템과 지상관제장치(GCS)를 개발했다. 구조분야에서는 비행체의 구조하중해석과 구조설계를, 공력분야에서는 비행체의 전산유동해석 및 풍동시험을, 회전익분야에서는 프롭의 설계 및 해석을 담당했다.

2018년 시험비행 최대 시속 165km까지 도달
쿼드틸트프롭 무인기(QTP-UAV) 시스템은 비행체와 지상관제 및 통신장비로 구성되어 있다. 비행체에는 두 개의 UHF 주파수의 통신장비와 센서 일체형 통합 비행제어컴퓨터(FCC)를 장착했다. 쿼드틸트프롭 무인기(QTP-UAV)는 배터리 버전 2대, 풍동모델 1대 등 3대를 제작했다. 풍동모델은 시험 완료 후 하이브리드 버전으로 개조할 수 있도록 제작했다. 쿼드틸트프롭 무인기(QTP-UAV)의 본격적인 비행시험은 고흥항공센터에서 진행했다. 안전줄을 뗀 최초의 회전익 비행은 2018년 9월 11일에 이루어졌다. 비행시험은 호버 비행을 시작으로 활주로 상공 저고도 회전익 모드 시험부터, 외부 조종사의 수동비행과 내부조종사의 유지모드, 그리고 최종적으로 자동비행 순으로 진행했다. 회전익모드 비행이 완료된 후 천이 비행은 고도 100~200m, 반경 500~600m의 점항법 비행을 통해 점진적으로 이루어졌다. 2018년 9월 18일에는 점항법 모드에서 단계적인 증속을 통해 틸트 0도, 비행속도는 시속 145㎞까지의 천이비행을 성공했다. 2018년 10월 25일 비행에서는 비행특성을 향상시키기 위한 제어로직 및 이득 조정을 거쳐 최대 속도 시속 165㎞까지 도달했다. 쿼드틸트프롭 무인기(QTP-UAV) 개발은 쿼드틸트프롭 비행체에 대한 특성과 관련 비행제어기술을 확보하는 성과를 거두었으며 또한 총중량 50㎏급의 고속-수직이착륙 무인기 시스템 기술을 확보했고, 분산 추진형 전기추진 수직이착륙 항공기에 대한 원천기술 확보로 미래형 교통수단으로 떠오르고 있는 전기추진 수직이착륙 개인용 항공기 사업에 적극 활용할 수 있게 되었다.2019년 DTP-H 1시간 체공 비행시험
총 4개의 프롭으로 구성되고 배터리 동력을 사용하는 QTP-UAV는 최대 비행시간이 30분 이내로 제한된다. 이러한 비행시간의 제한을 극복하는 방안중의 하나로 기존의 배터리 대신에 엔진-발전기-배터리로 구성된 하이브리드 추진 시스템을 QTP-UAV에 적용하여 개발하였다. 하이브리드 추진 시스템은 10마력급의 2-실린더 왕복엔진과 최대 5kW급의 발전기, 그리고 600Wh의 배터리를 이용하여 구성하였으며, 기존의 배터리 장착공간에 장착하였다. 더불어 비행체의 중량절감 및 프롭의 추진효율 증대를 위해 전방 2개의 프롭은 고정피치형 리프트 프롭으로 대체하였다. 하이브리드 추진시스템을 탑재한 DTP-H의 비행시험은 2019년 12월 16일 가장 파워가 적게 요구되는 비행속도 60~70km/h에서 이루어 졌으며, 약 4리터의 연료로 총 62분 비행에 성공하였다.- 전장2m(전폭 2.2m)
- 프롭 반경0.55m
- 총중량48kg
- 임무장비3㎏
- 최대속도160km/h
- 최대체공시간30분(배터리),1시간(하이브리드)
기존 무인기와 다른 차별화된 성능과 임무 수행
한국항공우주연구원은 2017년 부터 2020년 까지 재난·재해 발생 시 신속한 현장정보 수집 및 효과적인 임무수행을 지원할 수 있는 재난치안용 무인기와 지상통제장비, 통신 및 운용관리시스템, 특화임무장비 등을 개발 완료하였다. 한국항공우주연구원은 재난 및 치안분야의 사회문제 해결을 위해 소방청 주관으로 과학기술정보통신부, 산업통상자원부, 해양경찰청, 경찰청이 참여하는 ‘국민안전 감시 및 대응 무인항공기 융합시스템 구축 및 운용’사업(다부처공동사업)의 총괄주관기관으로 사업을 수행하였다.
재난안전과 항공우주 분야의 융합 기술이 개발되는 첫 걸음으로서 한국항공우주연구원을 비롯하여 29개의 기관 및 기업이 기술개발에 참여하였고, 한국산업기술평가관리원이 사업을 관리하였으며, 개발 전과정에 시스템 엔지니어링 기법을 적용하여 사업초기 임무정의부터 시스템 설계, 기본 설계, 상세 설계, 시제품 제작, 통합시험평가까지 정부 부처와 산․학․연 전문가 자문 그룹이 참여한 민간 최초의 재난치안용 소형무인기 체계 개발 사업이었다.
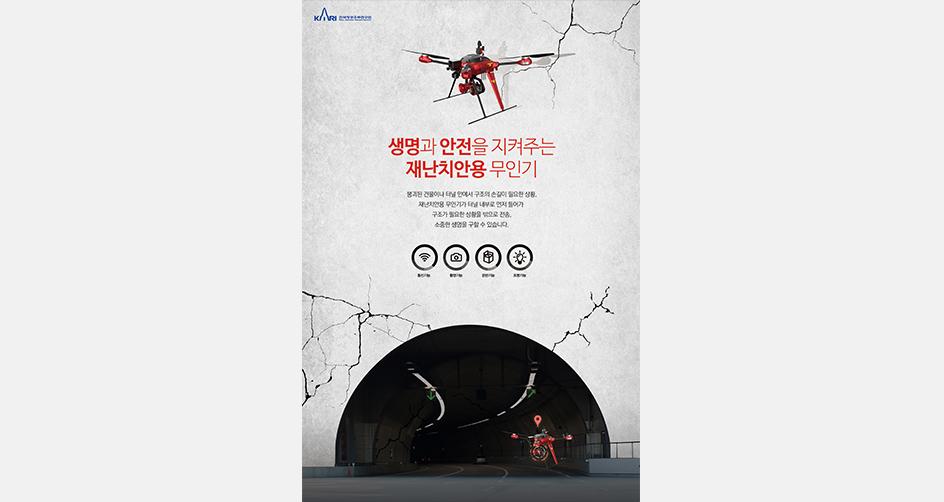
재난치안용 무인기는 임무정보 다지점 송신 기능, 복수 무인기 동시 운용 및 관리, 방수 및 방진, 내풍성 및 내열성, LTE/Wifi/C-band 통신 삼중화, 14종의 특화임무장비 플러그 앤 플레이, 어둡고 GPS 신호가 잡히지 않는 터널 등에서 무인기를 운용하기 위한 실내외 안전운항 체계(SLAM), 비가시권 통신·통신 중계 등 기존 무인기가 가지고 있지 않은 차별화된 성능과 다양한 재난치안환경 조건에서 소방, 해경, 경찰의 재난대응 임무수행 능력 향상에 중점을 두고 연구 개발하였다.
재난치안용 무인기 통합시스템은 지진 등으로 붕괴된 터널사고, 화재사고, 유해가스사고, 방사능 누출사고, 해상초계(조난 및 불법어선 감시), 해양오염사고, 선박 및 조난자 수색, 우범지역 순찰 및 교통량 확인, 불법드론 제압, 범죄 용의차량 및 용의자 식별 등의 임무에 활용함으로써 재난안전 예방의 순기능 강화와 수요부처의 신속한 초동 대응 능력 향상을 기대할 수 있다.

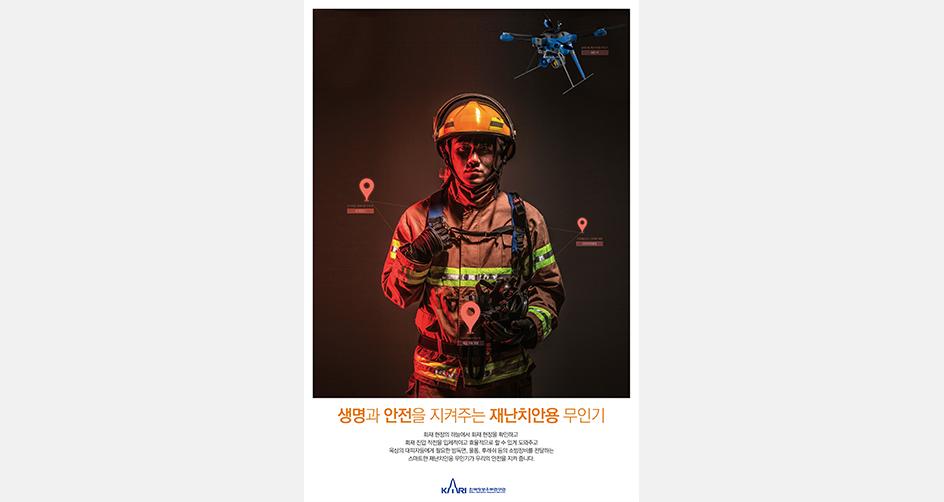


재난 및 치안 현장에서 신속한 정보수집 및 초동대응
2020년 8월 성공적인 통합시험평가 및 운용성평가를 끝으로 사업이 종료되었다. 이후 재난치안용 무인기 통합시스템은 소방청, 해양경찰청, 경찰청에 제공되어 시범운용과 실용화 개발을 거쳐 재난치안 현장에 배치될 예정이다. 재난치안용 무인기는 소방, 해경, 경찰 임무 현장 배치를 통해 재난·치안현장에서 신속한 현장정보 수집과 초동대응, 재난 조기탐지 및 진행·복구상황 실시간 모니터링 체계 구축이 가능할 것으로 기대된다. 본 연구개발 사업을 통하여 개발된 재난치안용 소형무인기 통합시스템은 재난안전의 최전선에 배치되어 운용됨으로써 국민의 안전이 최우선되는 미래사회 구현에 긍정적인 영향을 주는 데 크게 이바지 할 것이다. 재난치안용 무인기 통합시스템은 지진 등으로 붕괴된 터널사고, 화재사고, 유해가스사고, 방사능 누출사고, 해상초계(조난 및 불법어선 감시), 해양오염사고, 선박 및 조난자 수색, 우범지역 순찰 및 교통량 확인, 불법드론 제압, 범죄 용의차량 및 용의자 식별 등의 임무에 활용함으로써 재난안전 예방의 순기능 강화와 수요부처의 신속한 초동 대응 능력 향상을 기대할 수 있다.MC-1 (실내재난대응용)
- 크기580x585x459mm
- 최대이륙중량7kg
- 비행시간20분 이상
- 운용온도-20~50℃
- 방진방수IP43
- 내열성125℃ (10초 노출)
MC-2 (실외재난대응용)
- 크기927x930x750mm
- 최대이륙중량17kg
- 비행시간20분 이상
- 내풍성10 m/s
- 운용온도-20~50℃
- 방진방수IP43
- 내열성125℃ (10초 노출)
- 내부식성5% 염수분무 48시간 노출
MC-3 (실외재난대응용)
- 크기1480x1868x831mm
- 최대이륙중량35kg
- 비행시간20분 이상
- 내풍성15 m/s
- 운용온도-20~50℃
- 방진방수IP43
- 내부식성5% 염수분무 48시간 노출
드론에도 교통관리 서비스를... 유·무인기 안전과 무인기 활용 극대화
무인기의 기술 발전으로 민수와 공공분야의 활용이 증대되고 비행 수요가 급격히 증가하고 있다. 드론과 드론, 드론과 다른 유인항공기, 드론과 지상의 사람들이 어떻게 안전을 확보할지가 중요한 기술적·제도적 숙제로 부상했다. 이에 따라 유인항공기 운항 안전에 끼칠 영향을 최소화하면서 무인기의 활용성을 극대화할 수 있는 무인비행장치의 안전 운용을 위한 저고도 무인비행장치 교통관리시스템(UTM)에 관한 연구가 미국에서 시작되어 유럽(U-space)과 여러 나라로 확대됐다.
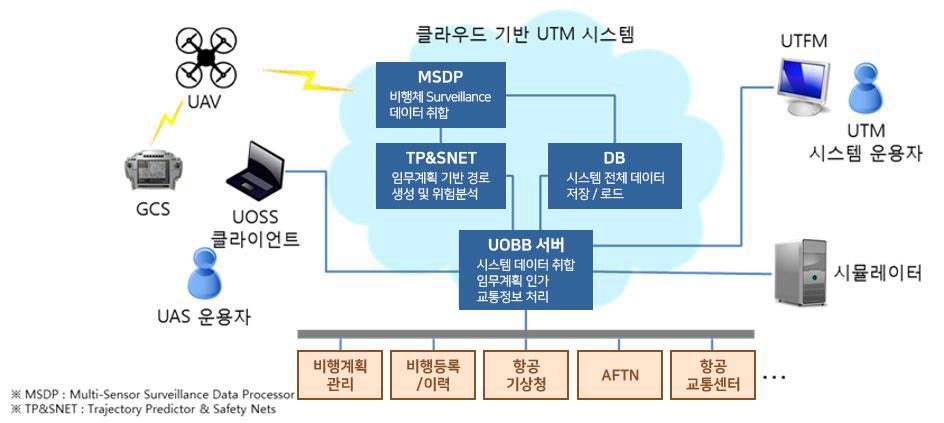
저고도 무인비행장치 교통관리시스템(UTM)은 고도 150m 이하의 저고도를 운항하는 자체 중량 150kg 이하의 무인기를 대상으로 안전하고 효율적으로 비행할 수 있도록 교통관리 서비스를 제공하는 시스템이다. 한국항공우주연구원은 국토교통부의 지원으로 2017년부터 2022년까지를 목표로 저고도 무인비행장치 교통관리시스템(UTM) 개발 및 실증시험 연구개발 사업에 참여하고 있다. 2019년 재기획을 통해 국제적인 기술 동향 변화를 반영하여 연구 목표와 범위가 조정되었으며, 2020년부터 2단계 저고도 무인비행장치 교통관리시스템(UTM) 개발이 추진되고 있다. 2단계 저고도 무인비행장치 교통관리시스템(UTM)은 국가가 관리하는 비행정보시스템(FIMS, Flight Information Management System)과 민간사업자가 담당할 것으로 예상되는 UTM 서비스시스템(USS, UTM Service System)의 부체계로 구분하여 설계 및 개발이 진행되고 있다. 또한 무인비행장치의 공역 설계와 안전 비행을 위한 위치인식 요건, 고도 기준, 분리 기준 설정 등 저고도 무인비행장치 교통관리시스템(UTM) 운용 안전 기술도 개발하고 있으며, 저고도 무인비행장치 교통관리시스템(UTM) 개발과 검증을 위한 시뮬레이션 시스템 구축 등을 포함하고 있다.
20대 이상의 드론으로 교통관리 시연 성공
1단계 사업에서는 저고도 무인비행장치 교통관리시스템(UTM) 관제실을 구축하고 비가시권 비행을 수행하는 5대 이상의 드론을 동시에 관리할 수 있는 교통관리 체계를 개발했다. 현재 진행 중인 2단계 사업에서는 전국망 구축을 포함해 적용 범위와 교통관리 방식에 대한 심층적인 연구를 진행한다. 2개 이상의 지역에서 20대 이상의 드론을 대상으로 교통관리를 제공하는 저고도 무인비행장치 교통관리시스템(UTM)을 개발하고 실증 시험을 수행하는 것이 목표로 2020년 6월 강원도 영월 드론 시험장에서 배송, 방제, 측량 등 각각 미션을 부여받은 6대의 드론이 저고도 무인비행장치 교통관리시스템(UTM)을 이용해 목적지로 이륙을 신청하고 허가를 받아 미션을 완수하고 착륙을 승인받는 전체 과정을 안정적으로 시연했다. 2020년 4월에는 인천 GS 칼텍스 물류 센터에서 유류 샘플 운송을 위한 배송용 드론과 저고도 무인비행장치 교통관리시스템(UTM)과의 연계, 2020년 11월에는 여의도 한강시민공원에서 EHang사의 216 eVTOL UAM 기체와 저고도 무인비행장치 교통관리시스템(UTM)과의 연계를 성공적으로 시연하였다. 저고도 무인비행장치 교통관리시스템(UTM)은 초고속 이동통신망과 인터넷망을 활용하기 때문에 사용자는 언제 어디서나 모바일 기기 등도 활용하여 손쉽게 드론의 식별 ID, 위치 정보, 실제 비행 궤적 등을 실시간으로 모니터링할 수 있다. 저고도 무인비행장치 교통관리시스템(UTM)을 통해 주변에서 운용 중인 다른 드론의 비행 정보를 알 수 있을 뿐 아니라, 비행금지구역 정보, 기상 정보, 유인기 비행 정보 등을 제공 받아 비행에 활용할 수 있으므로 타 비행체와의 충돌 방지, 비행금지구역 접근 방지, 충돌 방지를 위한 자동 경보 제공 기능 등으로 무인기의 운용 안전성과 활용도를 높일 수 있을 것으로 기대된다. 또한, 항공교통관리기관이나 정부에서는 불법 드론의 감시 및 적발, 유무인기 간의 충돌 방지를 위한 기본 수단으로 활용할 수 있다. 또한 저고도 무인비행장치 교통관리시스템(UTM) 기술은 드론으로 통칭되는 무인비행장치 뿐만 아니라 향후 도심 항공 모빌리티(UAM, Urban Air Mobility) 환경에서 개인항공기의 항행 안전을 위한 기반 기술로도 응용될 수 있다.민간 무인항공기 인증기술 표준화
항공, 정보통신기술 등 기술 융합으로 시장 성장을 주도하고 있는 무인항공기는 지금까지는 군수용 시장이 주를 이루었으나 앞으로는 민간 상업용 시장 또한 급속한 성장이 예상되고 있다. 무인항공기 수요에 맞추어 국제적으로 민간 영역에서 무인기의 활용을 넓히기 위하여 관련 법, 제도, 기준을 마련하고 무인항공기 시험 공역 지정, 제한적인 특별운항허가 발급 등을 진행하고 있다.
국제민간항공기구(ICAO)는 2014년부터 자체 중량 150kg이상 무인항공기에 대한 감항성 요건(Airworthiness Code)을 포함한 국제 표준화 작업을 진행 중이며 미국 연방항공청(FAA)은 2013년부터 무인항공기 형식증명 프로젝트를 통한 위험도 기반(Risk-based) 인증체계를 수립하여 적용하고 있다. 또한 유럽항공안정청(EASA)은 2015년부터 최대이륙중량 600kg 기준으로 무인항공기와 경량무인항공기로 구분하여 감항기준을 개발 중에 있으며 국내에서는 2020년 8월 항공기 기술기준 개정을 통해 기존의 항공기 기술기준에 따라 제작되지 않는 무인항공기, 전기동력 수직이착륙항공기, 유무인항공기 등 연구개발용 신기술 적용 항공기에 대한 특별감항증명 절차를 보완하고 실험분류의 특별감항증명 검사를 위한 안전평가표에 따라 안전성을 입증하도록 하였다.
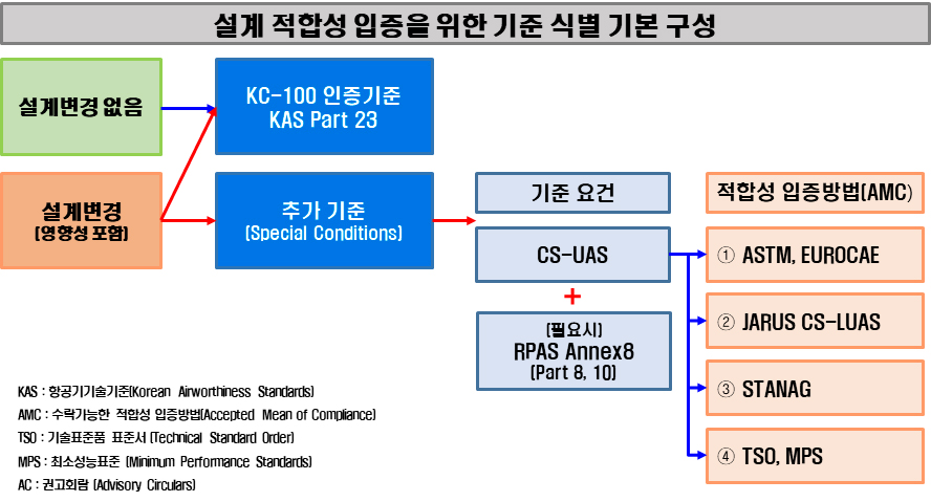
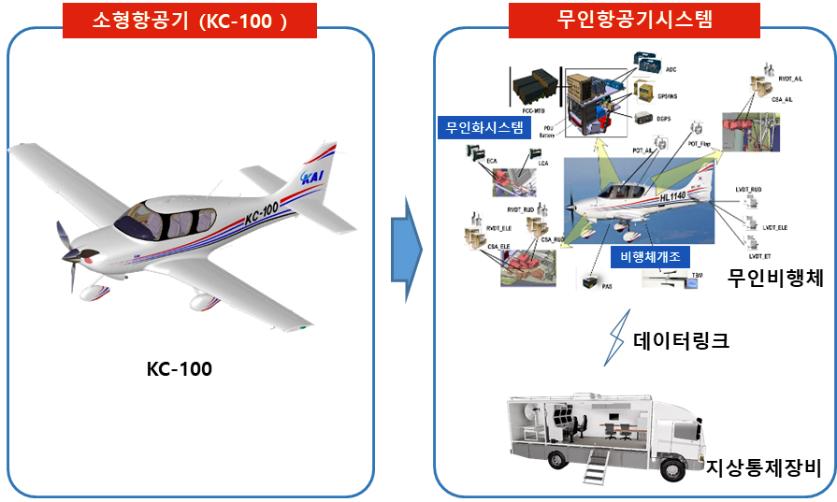
소형항공기급의 민간용 무인항공기에 대한 인증기술 개발1
국제적으로 진행 중인 무인항공기 인증기술 표준화에 대응하여 ICAO 국제표준과 권고사항에 부합하고 타선진국과 동등한 인증체계 확보를 위하여 소형무인기 인증기술 개발 사업이 2019년 4월 착수되어 2023년 12월까지 무인항공기 인증 인프라 구축을 목표로 현재 연구개발이 진행 중이다. 이를 위하여 2013년 국내 형식증명을 받은 4인승 소형항공기 KC-100 ‘나라온’을 무인항공기로 개조하고 항공기 기술기준의 절차를 준용하면서 무인항공기의 설계 특성과 관련한 특수조건을 적용한 설계적합성 기준(안)을 개발하고 있다. 이러한 기준을 기반으로 소형무인비행기시스템 개발하고 적합성을 입증하고 확인하는 절차를 통해 소형항공기급의 민간용 무인항공기에 대한 인증기반 및 체계가 구축되기를 기대한다.- 전장8.03m(전폭 11.29m)
- 총중량1,633kg
- 임무장비100kg
- 최대속도389km/h
- 최대체공시간5시간
덕트 없는 무인기 대비 추력 효율 최대 60%
틸트덕트(Tiltduct) 무인기는 프로펠러에 덕트(duct)를 씌운 무인기로, 덕트가 없는 무인기 대비 최대 60%의 추력 효율을 발생시킬 수 있다. 헬리콥터처럼 떠서 날아가는 틸트덕트 형상의 날개를 적용해 지상의 구조물로부터 날개를 보호하고 추력을 증가시키고, 지상시스템과의 연동으로 지상에서 비행체에 임무를 부여하고 감시하고 통제할 수 있다.
틸트덕트 무인기(TD-40)는 2012년부터 2017년까지 산업통상자원부 로봇산업융합핵심기술개발사업 ‘1시간 이상 비행이 가능한 다목적 수직 이착륙 비행로봇 시스템 개발’ 과제로 개발했다. TD-40의 요구 성능은 속도 150㎞/h 이상, 체공시간 1.5시간이며, 이동형 도킹 스테이션에서 자동 이착륙할 수 있는 정밀제어 성능을 갖는 것이다. 틸트덕트 무인기 시스템은 비행체, 지상관제 및 통신장비로 구성된다. 지상관제시스템은 자체 개발한 GCS 프로그램을 탑재한 노트북, 조종기, 그리고 노브 장치로 구성된다. 비행체에는 통신장비와 센서를 통합한 비행제어 컴퓨터를 장착했다. 틸트덕트 무인기의 각 덕트 안에는 콜렉티브 피치 제어가 가능한 메인 프롭과 자세 제어를 위한 베인 장치를 장착한 링 날개 구조의 덕트로 되어 있다. 동체에는 15마력급 로터리 엔진과 수평·수직미익 사이에 모터로 회전하는 후방 프롭이 장착되었다.
틸트덕트 무인기의 비행 모드에 따라 조종방식이 달라 회전익모드에서는 메인 프롭과 후방 프롭의 콜렉티브 피치로 비행체 자세를 제어하고 틸트가 고정익모드에 가까워지면 덕트 내부의 베인과 수평꼬리날개의 조종면을 이용해 자세를 제어한다. 안전 줄 시험을 통해 비행체의 회전익모드 비행 특성과 덕트 효과를 파악하고 제어로직의 안정성과 향상된 조종력을 확보했다.





초도 비행속도 시속 153km
한국항공우주연구원은 2017년 고흥항공센터에서 틸트덕트 무인기 초도비행을 시작해 비행속도 153㎞/h에 도달했다. 비행시험은 호버 비행을 시작으로 회전익모드 비행, 내부 조종사의 유지모드 비행, 그리고 천이모드 자동비행 순으로 진행했다. 틸트덕트 무인기는 1시간 30분 이상 체공과 150km/h 이상 속도로 비행이 가능하다. 특히 외부와 연결된 도킹 스테이션은 비상시 개활지가 아닌 도로상에서도 비행체가 이착륙 할 수 있는 환경을 제공하여 무인항공기 운용 효율성을 높일 수 있다. 또한 활주로가 없는 지역이나 크기가 작고 좁은 지역에서도 운영이 가능해 화재와 치안 감시는 물론 실시간 동식물 분포현황 조사, 차량 추적, 대형구조물 원격진단 등 다양한 분야에서 활용 가능하다.TD-40
- 전장2m(전폭 2m)
- 총 중량40kg
- 최대속도170km/h
- 체공시간2.5hrs
TD-20
- 전장1.5m(전폭 1.5m)
- 총 중량20kg
- 최대속도150km/h
- 체공시간1hrs
위치발신 장치(ADS-B) 기반 무인항공기 충돌회피 시스템 개발
무인항공기 분야의 급성장으로 무인기가 유인항공기의 공역에 들어올 때 발생할 수 있는 사고를 미연에 방지할 수 있는 시스템이 매우 중요하다. 이러한 충돌회피시스템을 장착하지 않은 무인기가 비행할 경우 저고도에서 고고도에 이르기까지 항공기 운항에 막대한 위험을 초래할 수 있다. 이처럼 충돌회피시스템 개발은 날로 성장하는 무인기의 상용화 확대와 유인항공기의 안전을 위해 반드시 필요한 기술이다. 또한 요즘 미래기술로서 한국을 비롯한 많은 국가에서 투자하고 있는 도심항공모빌리티(UAM, Urban Air Mobility) 개발에도 필수적으로 포함되어야 할 기술이다.
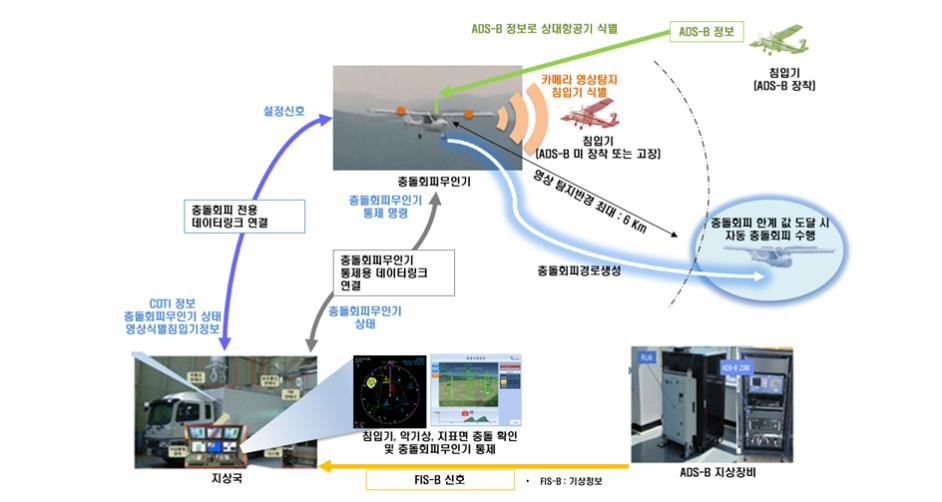
한국항공우주연구원은 국내 산업체와 함께 충돌회피 알고리즘을 포함시킨 충돌회피 탑재시스템, 위치발신 장치(ADS-B, Automatic Dependent Surveillance- Broadcast)와 영상 센서를 기반으로 한 ‘ADS-B 기반 무인항공기 충돌회피 시스템’을 개발하였다. 2015년부터 2020년까지 진행된 이 사업은 위치발신 장치(ADS-B) 기반 무인항공기 센서퓨전 충돌회피시스템 개발 및 시험평가 수행을 목표로 무인기의 민간 항공기 공역 통합 운용이 가능하도록 하는 유인기 성능에 준하는 통합 충돌회피시스템을 개발하는 것이다.
기능 검증, 데이터 수집을 위한 비행시험, 통합비행시험으로 성능 입증
공중 충돌 방지를 위한 유·무인항공기의 충돌회피 시스템을 위해서는 주변 항공기를 인식하고, 이에 대한 회피 값을 생성하는 장비가 필요하다. 유인항공기에서는 일반적으로 트랜스폰더를 이용한 공중충돌방지장치(TCAS) 기반의 충돌회피를 수행하게 되는데 최근에는 방송을 통해 항공기 간의 상태 값을 주고받을 수 있는 위치발신 장치(ADS-B)가 주변 항공기를 탐지하기 위한 장비로 각광받고 있다. 한국항공우주연구원은 위치발신 장치(ADS-B)를 이용하여 침입기를 회피하는 충돌회피시스템을 설계·개발했다. 충돌회피 시스템은 크게 충돌회피 모듈, 위치발신 장치(ADS-B) 탑재 장비, 통신 장비 등으로 이루어졌다. 위치발신 장치(ADS-B)는 1Mbps, 978MHz 대역의 범용 접속 데이터통신(UAT, Universal Access Transceiver) 방식의 시스템과 장비를 도입하고 위치발신 장치(ADS-B)와의 메시지를 통해 침입기의 정보를 판단하고 전달하도록 탑재장비를 구성하였다. 개발한 시스템은 구성품 시험을 통해 기능을 검증했고, 실제 데이터 수집을 위한 비행시험을 수행하였으며, 분석된 데이터를 기반으로 충돌회피시스템의 효율을 최적화한 후, 최종 비행시험들을 통해 개발한 시스템의 성능 입증을 완료하였다.유인기를 무인화해 혼용항공기로 활용
유·무인 혼용항공기(OPV, Optional Piloted Vehicle)는 무인 비행과 유인 비행이 가능한 항공기이다. 한국항공우주연구원은 국내에서 개발한 항공 부품을 탑재해 실제 비행 조건에서 시험할 수 있고, 무인기 개발에 활용될 수 있도록 확장성 있는 기본형 무인 비행플랫폼 개발을 목표로 유인항공기를 무인화해 유·무인 혼용항공기로 활용할 수 있는 기술을 개발했다. 유·무인 혼용항공기는 사람이 탑승하지 않고 무인기로 비행할 수도, 조종사가 탑승해 조종할 수도 있는 항공기이다. 반복적으로 동일한 조종이 가능해 항공 부품의 비행시험을 수행하는데 유리하다. 본 사업은 산업통상자원부의 항공우주부품기술개발사업의 지원을 받아 연구를 수행하였다.고흥항공센터에서 초도비행 시험
유·무인 혼용항공기 기체에는 비행조종컴퓨터·각종 센서·통신 송수신기·안테나 등을 장착했으며, 기존 조종 계통에 비행조종컴퓨터가 제어하는 작동기를 연동 장착했고 무인화 시스템 동작을 위해 전원공급을 위한 추가 발전기를 엔진에 장착했다. 최대 이륙중량 600㎏으로 사고 발생 시 피해가 클 수 있어 비행조종시스템과 통신시스템을 이중화해 신뢰도를 높였다. 또한 탑재 시스템 각 구성품의 진동 온도 시험과 탑재 시스템에 대한 전자기 호환성(EMC)시험을 수행했다. 이외에 무인비행 운영을 위한 기본형 지상통제장비를 개발했고, 위치 추적안테나를 장착했다. 유·무인 혼용항공기는 2013년 고흥 항공센터에서 초도비행을 시험했다. 이착륙은 외부조종사가 조종하고 이륙 후 일정한 고도에 이르면 지상통제장비에서 내부조종사가 항공기에 장착된 카메라 영상에 의존해 스틱 모드로 조종하거나 경로점을 지정한 자동비행을 수행했다. 비행 안전성 확인 후에는 시험대상 부품을 항공기에 장착하고 비행시험을 수행했다. 시험부품의 성능을 정확하게 측정하기 위해 정밀도가 높은 기준시스템을 장착했으며 무인항공기의 장점을 살려 복잡한 조종을 정확히 반복 수행할 수 있는 자동 비행시험 시스템도 개발했다. 국내 업체에서 개발한 3종 부품에 대해 한서대(자세방위장치(AHRS) 센서시험, GPS·관성항법장치(INS) 시험)와 울산공항(초단파 전방향 무선 표지(VOR) 수신기시험)에서 비행시험을 수행한 후 데이터 분석을 통해 적합성을 확인했다.노후된 군용기 무인화해 활용 가능
유·무인 혼용항공기의 최대 속도는 시속 222km이고, 최대 항속거리는 1,500km이다. 해양, 산불, 환경, 교통, 불법어로 감시 등 반복적이거나 장기체공 등이 필요한 임무에 효율적으로 운용할 수 있다. 연구를 통해 확보한 유·무인 혼용항공기(OPV) 개발 기술을 활용해 노후 되거나 쓰임새가 줄어든 군용 항공기를 무인화해 사격 훈련용 표적기, 레이더 기지 타격기 등으로도 활용 가능하며 수색·정찰 등 재난대응 무인기로도 활용할 수 있다. 또한 위치발신 장치(ADS-B) 기반 무인항공기 충돌회피 시스템 기술 개발과 안전 운항 기술 연구 등에 활용되고 있다. 이러한 유·무인 혼용항공기 연구 성과는 2014년 한국기계기술단체총연합회가 선정한 10대 기계기술에 선정됐다.- 전폭8.6m
- 이륙중량600kg(탑재중량 100kg)
- 최대속도222km/h
- 체공시간2h
- 항속거리1,500km(임무반경 50km)
18km 이상 성층권 비행 전기 무인기 관심 고조
성층권 태양광 무인기는 고도 18㎞ 이상의 성층권에서 수주일 체공하는 전기 무인기에 대한 국제적 관심이 높아지면서 친환경 전기추진 동력시스템 기술과 고고도(성층권) 장기체공(HALE, High Altitude Long Endurance) 기술을 접목한 항공기이다. 성층권 태양광 무인기(EAV, Electrical Aerial Vehicle)는 이륙 시 리튬이온배터리를 사용하고 비행 중에는 날개 윗면에 장착된 태양전지가 2차 전지를 지속적으로 충전해 에너지원으로 활용하는 무인기로 고(高)고도인 성층권에서 비행한다.
고도 18㎞의 성층권은 대기압이 지상의 20분의 1에 불과하고 온도가 –70℃까지 내려간다. 하지만 비관제 영역으로 풍속이 낮고 구름이 없어 태양광을 동력원으로 활용할 수 있을 뿐만 아니라 악천후와 상관없이 항상 비행할 수 있어 지상관측, 기상관측 및 통신 중계 등의 임무를 수행할 수 있다. 또한 일반 민항기가 고도 10km에서 비행하기 때문에 성층권 비행은 민항기와 사고 날 일이 없어 매우 안전한 비행이 가능하다.
성층권 태양광 무인기는 연료전지 시스템을 적용한 스팬 2.6m급의 EAV-1을 개발해 비행시험을 수행함으로써 경량의 연료전지 시스템의 무인기 적용 가능성을 검토했다. 또한 태양전지, 배터리 및 연료전지를 동력원으로 사용하는 스팬 6m급의 하이브리드 무인기 EAV-2를 개발해 각 동력원의 장단점과 향후 활용 가능성을 점검했다.
미국의 유력 항공기 시장조사 기관인 틸 그룹(Teal Group)이 낸 보고서(2016.7)에 따르면, 통신분야의 경우 고고도 장기체공 무인기의 활용시장은 2025년 15억달러 규모로 중/소형무인기를 활용한 농업분야(13.6억달러)를 넘어 건설분야(16.5억 달러)에 근접하게 성장할 것으로 전망하고 있다.










성층권 비행체 개발 성공 53시간 이상 비행
EAV-1은 기존 배터리를 사용할 경우 1.5시간 비행만 가능하나 저압 수소 발생형 PEM 타입 연료전지를 적용해 2010년 10월 4.5시간 체공 비행에 성공했다. 하이브리드 무인기인 EAV-2는 야간에는 연료전지와 배터리를, 낮에는 태양에너지를 이용하는 방식으로 2012년 8월 22시간 10분 연속 비행하였으며, 2020년 8월 53시간 비행에 성공하였다. 이후 태양전지와 배터리를 적용해 동력 시스템을 단순화시켜 고고도용 비행체 개발을 진행했다. 밀도와 온도가 낮은 성층권 환경에서 운용되는 비행체는 초경량 기체구조 기술, 저온 저밀도 추진 시스템, 태양광 및 배터리 동력기술, 저 레이놀즈 수 영역의 프로펠러 설계 기술 및 유연한 항공기 자동제어 기술 등이 필요하다. 이에 따라 관련 기술을 확보하고 T-800급 국산 복합재를 처음으로 무인기에 적용하고 저온 특성과 인장 능력이 우수한 마일러 소재를 적용해 초경량 기체 구조를 실현했으며, –70℃의 환경에서 작동하는 저속 고토크 BLDC모터와 모터 제어기를 개발했다. 아울러 모터 특성과 밀도가 1/14까지 감소하는 성층권 대기를 고려해 저 레이놀즈 수 영역에 적합한 고효율 프로펠러를 설계하고 비행제어 컴퓨터, 대기 측정장치 및 조종면 작동기 등 주요 시스템을 이중화해 유사시에도 안전하게 자동비행이 가능토록 했다.세계 세 번째로 성층권 비행 성공
EAV-2의 확장형인 EAV-2H는 2013년 10월 국내 최장 기록인 25시간 40분 연속 비행기록을 세웠고, 2014년 9월에는 고도 10㎞까지 상승함으로써 국내 무인기 비행고도 기록을 수립했다. 성층권 태양광 장기체공 Full scale기인 EAV-3는 단결정 태양전지와 리튬 이온 배터리를 동력원으로 이용해 2015년 8월 고도 14.2㎞, 2016년 8월 비관제 공역인 고도 18.5㎞에서 90분간 비행해 성층권 태양광 무인기의 활용 가능성을 시연했다. 이러한 성과는 미국과 영국에 이어 세계에서 세 번째다. 그 후 한국항공우주연구원은 고고도에서 비행이 가능한 고성능 배터리 팩 및 초경량 고강성 구조물 기술을 개발해 왔으며, 50km 거리까지 실시간 HD 영상을 전송받을 수 있도록 통신 성능을 향상시켜 2020년 8월 16일부터 18일까지 수행된 비행시험에서는 고도 12km~18km 성층권에서의 16시간 비행을 포함, 국내 최장 53시간 연속비행을 기록했다. 또한 2020년 8월 30일에는 국산 리튬황 배터리를 장착하고 고도 22km까지 상승하며 국내 무인기 최고 비행고도 기록을 수립하였다. 현재 그동안의 연구성과를 바탕으로 20kg 이상의 임무 장비를 싣고, 30일 이상 성층권 연속비행이 가능한 세계 최고 성능의 성층권 태양광 무인기 EAV-4를 개발중에 있다.세계 두 번째 틸트로터 항공기 기술 개발
수직이착륙과 고속비행이 가능한 틸트로터 항공기는 이륙 시 로터가 헬리콥터처럼 수직 방향으로 위치해 있다가 전진 비행 시에는 로터를 다시 수평으로 바꿔 속도를 높이는 항공기로, 고정익기와 헬리콥터의 장점을 결합한 것이 특징이다. 2002년부터 10년에 걸쳐 연구개발을 진행해 미국에 이어 세계 두 번째로 틸트로터 무인기 TR-100을 개발했다.
틸트로터 항공기는 헬리콥터에 비해 2배 이상 빠른 속도와 높은 고도로 비행할 수 있어 효율적으로 넓은 지역의 감시, 수색, 정찰, 운송, 통신 중계 등의 임무를 수행할 수 있다. 산악지형과 삼면이 바다로 둘러싸여 활주로를 확보하기 어려운 국내 환경에 적합하고 적지 정찰 등의 군사적 이용은 물론 해안 및 도서 정찰, 산불 및 교통 감시, 기상 관측 등의 다양한 분야에서 활용할 수 있다. 또한 활주로 없이 이동할 수 있는 개인항공기의 플랫폼으로 응용이 가능한 첨단 기술이다.
TR-100의 성능은 최대속도 500㎞/h, 임무반경 200㎞, 최대체공시간 5시간, 유상하중 90㎏이며 엔진은 550마력의 터보샤프트 엔진을 사용하고 비행체, 통신, 관제 및 지상 지원 장비로 구성되어 있다. 비행체에는 임무장비로 주야간 감시 카메라가 탑재되어 있고, 주요 항공전자 장비로는 비행제어 컴퓨터와 항법장비가 탑재되어 있다. 지상 관제장비를 통해 200㎞ 반경 내 특정 지역으로 감시 정찰 비행을 명령하면 탑재된 컴퓨터가 항법장치와 연계해 자동으로 계획된 지점을 비행하며 임무를 수행하도록 조종한다. 비행체에 탑재된 주야간 감시 카메라는 3㎞의 고도에서 목표물의 영상을 촬영하고 통신장치는 정보를 실시간으로 지상에 전송하며 지상에서는 이러한 영상을 수신해 재난 지역이나 적진의 상황을 파악한다.
특히 아직까지 세계적으로 틸트로서 무인기가 상용화된 사례가 없어, 상용화에 성공할 경우 틸트로터를 활용한 첨단 무인기 시장을 선점할 수 있을 것으로 기대된다. 이에 따라 한국항공우주연구원은 틸트로터 항공기 실용화 모델인 TR-60의 실용화 개발을 지속적으로 추진 중이다.















TR-100이어 실용화 모델 TR-60 개발 성공
한국항공주연구원은 2008부터 2011년까지 비행체 총중량 200㎏급으로 체공시간 5시간, 최고속도 250㎞/h, 임무반경 60㎞, 유상하중 20㎏의 성능을 목표로 고성능·저중량·저비용의 실용 틸트로터무인기 TR-60를 개발했다. 그 결과 자동이착륙 및 천이비행을 성공해 2011년 8월 ㈜대한항공과 기술이전 및 공동개발 협약을 맺고 TR-60급 틸트로터를 2년간 공동 개발했다. TR-60은 헬리콥터보다 높은 고도에서 훨씬 빠른 속도로 비행할 수 있어 보다 효율적으로 넓은 지역의 감시·수색·정찰·운송·통신·중계 등의 용도로 활용이 가능하다. 또한 틸트로터 무인기의 체공시간, 항속거리, 최대속도 등 성능개선과 함께 다양한 응용이 가능하도록 차량이나 함상 등 이동체에서 수직 이착륙할 수 있는 기술 개발을 완료했다. 틸트로터 기술은 무인 항공기뿐 아니라 유인 항공기로의 활용성이 더욱 높다. 수직이착륙과 고속비행이 가능해 우리나라와 같이 활주로가 부족한 환경에서 개인용 항공기(PAV, Personal Aerial Vehicle)로의 활용 잠재력뿐 아니라, 미국·유럽·중국 등이 현재 개발하고 있는 헬리콥터에서 발전된 차세대 수직이착륙 항공기로의 활용이 기대되고 있다.TR-100
- 이륙중량최대 995kg
- 최대속력500km/h
- 최대고도6km
- 전장5m
TR-60
- 이륙중량최대 200kg
- 최대속력240km/h
- 최대고도4km
- 전장3m
국내·세계 최초 틸트로터 무인기 함상 자동이착륙
한국항공우주연구원은 2015년부터 2017년까지 200kg급 틸트로터 무인기(TR-60)의 함상운용 입증을 위한 기술개발 과제를 산업통상자원부 지원으로 수행했다. 원양조업 어군 탐지, 광역 해상에서의 불법 어로 및 해상안전 감시 등을 위한 함상용 자동이착륙 기술개발이 주요 목표였다. 10노트 속도로 이동하는 해경의 4,300t급 훈련함에서 자동으로 이륙하여 함정 외부로 비행했다가 다시 전진하는 해경함에 안전하게 착륙하는 등 10회 연속 함상 자동이착륙 시연에 성공했다. 지상과는 달리 해상에서의 선박은 파도에 의한 갑판의 불규칙한 흔들림을 발생시킨다. 그래서 불안정한 후류 등 이착륙에 불리한 환경에서 선박의 착륙 지점에 무인기를 자동으로 정밀하게 유도하여 착륙시키는 것이 중요하다.
이를 위해 선박과 무인기 간 정밀한 상대거리 계산을 위해 센티미터(㎝)급 정밀도를 제공하는 실시간 이동측위(RTK, Real Time Kinematics) GPS 방식 정밀상대항법장치를 개발했다. 관제장비에는 함상운용을 위한 소형화와 함께 착륙지점의 이동을 고려한 비행제어 및 비행통제 기능을 구현했으며, 선박 운동에 상관없이 안정적인 통신이 가능하도록 지상추적안테나를 안정화시키는 기술도 적용했다.
함상이착륙 비행시험 성공을 통해 틸트로터 무인기의 함상 운용 가능성이 확인되었으며, 실용화 개발을 통해 육상은 물론 어군탐지, 불법어업 감시, 해양안전 감시 등 해상에서 다양한 용도로 틸트로터 무인기를 활용할 수 있는 기술적 토대를 구축했다. 특히 무인기 함상 자동이착륙은 국내 최초일 뿐 아니라 틸트로터 무인기의 함상 자동이착륙은 세계 최초로, 연구결과는 SCIE급 저널 2곳에 게재되는 등 국제 사회에서 한국 과학기술 위상을 높이고 국산 무인기의 상품성을 높이는 데 기여했다.




- 최대속도240km/h
- 이륙중량최대 200kg
- 동체길이3m(날개길이 3m)
- 체공시간5시간
