

An unmanned vehicle is a vehicle that recognizes the external environment on its own without human help, decides the situation, and performs its mission. A drone is a typical vehicle. It is expected to create a new driving force in various fields such as agriculture and transportation as it can replace humans in jobs that require a long time.
In response to the surge in demand for unmanned vehicles, KARI supports the development of common technologies applicable to various types of vehicles and technology demonstration vehicles capable of high-level integrated operation in multiple environments of land, sea, and air. Additionally, it supports the development of UTM (UAV Traffic Management) technologies to monitor and control traffic of low-altitude UAVs. It also supports small UAV base technology to improve the performance of small UAVs and small UAV technology linked to PPI (Public Procurement of Innovation).
The main goal is to secure innovative, original technologies that can take an early lead in the next-generation unmanned vehicle market and increase technological competitiveness by developing a system for integrated operation, such as cooperation, docking-undocking of heterogeneous multiple unmanned vehicles.
As the number of unmanned vehicles companies continues to increase, KARI is gradually expanding the targets for technology transfer by regularly identifying companies' needs for technology transfer during each project. Moreover, it plans to support and utilize the conversion of original technologies developed by the project into products and services by linking to commercialization and start-up support programs implemented by other agencies.
As the demand for unmanned vehicles capable of performing high-level intelligent missions is expected to grow rapidly, KARI plans to focus on securing innovative technologies that can take an early lead in next-generation markets by developing integrated operations that can overcome the constraints of the operating environment.

KARI’s Unmanned Vehicle Core Technology Development Program Office aims to secure innovative core technologies and enhance technical competitiveness by developing foundational technologies applicable to land, sea, and air domains. It also focuses on establishing an operational system based on autonomous collaboration among diverse unmanned platforms.
Secure innovative foundational technologies to lead the next-generation unmanned vehicle market and enhance competitiveness
2020.6~2027.5(7) Phase 1(20~22) / Phase 2(23~27) KRW 149.54 billion (national expense)
Including shared components applicable to land, sea, and air platforms, and platform-specific parts derived from shared core technologies
To verify the effectiveness and performance of newly developed systems and validate methodologies and applied technologies through operational testing


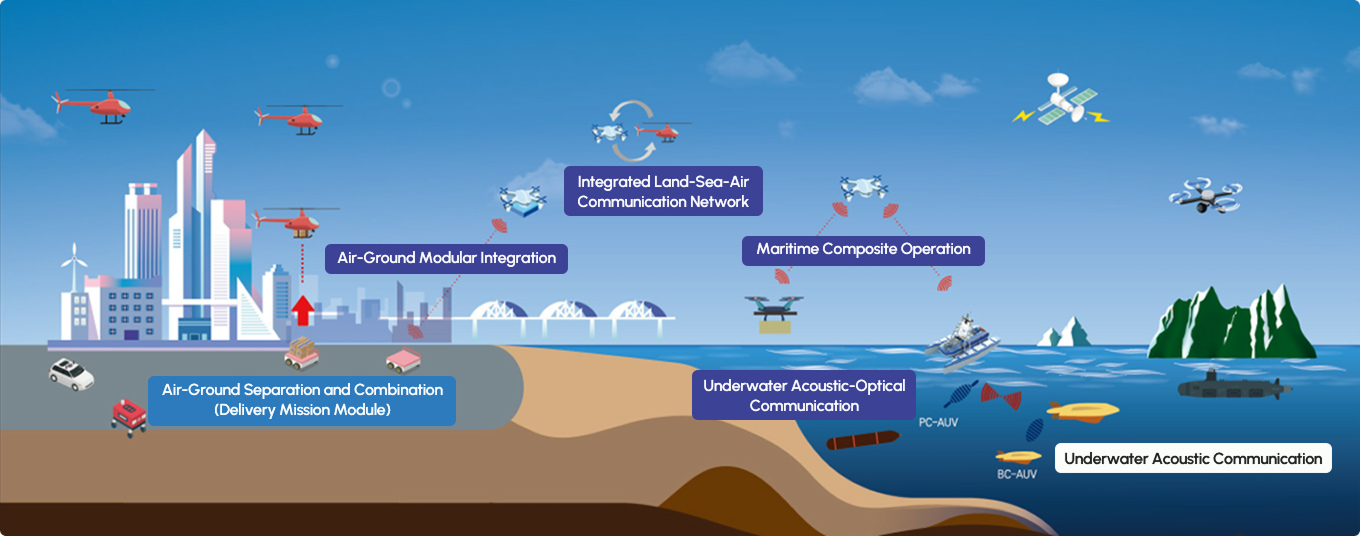
KARI is leading efforts to develop common foundational technologies across six major technical domains applicable to land, sea, and air unmanned platforms. In parallel, it is building integrated operational demonstrators that apply these technologies in autonomous cooperation scenarios involving multiple heterogeneous unmanned systems, spanning air-ground and maritime composite operations. These initiatives are aimed at validating technology performance and facilitating real-world applications.
| Classification | Technology Definition | Implementation Strategy |
|---|---|---|
| Perception and Sensing | Detection, analysis, and processing of external information via sensors | (Navigation Research Team): Develops precision navigation, guidance, and obstacle avoidance technologies for operations in indoor and non-line-of-sight environments |
| (Sensor Research Team): Focuses on enhancing mission equipment performance and signal processing technologies for effective operation in indoor and obstructed environments | ||
| Communications | Enables information exchange between operators and vehicles, and among vehicles themselves | (Research Team): Develops highly reliable communications for command and mission data, as well as secure communication protocols |
| Autonomous Intelligence | Empowers unmanned vehicles to independently perceive and process situational data | (Research Team): Develops intelligent algorithms and technologies for collaborative operation among multiple heterogeneous unmanned systems |
| Propulsion Systems | Electric propulsion-based mobility systems | (Task Group): Develops high-power electric motors, energy management systems, and distributed electric propulsion technologies |
| Human-Machine Interface (HMI) | Communication technologies between humans and unmanned vehicles | (Research Team): Develops collaboration technologies that consider human cognitive limitations and the technical maturity of the system |
| System Integration | Processes and hardware for unmanned vehicle development | (Hardware Research Team) Develops technologies applying multifunctional and biomimetic structures with 3D printing technique |
| (Task Group) Establishes a development and integrated design system that allows easy application and verification of new technologies |
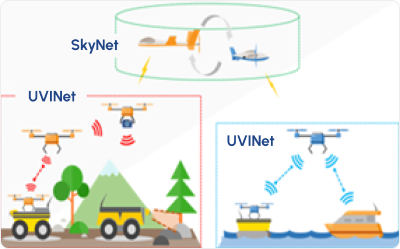 Integration Across Land, Sea, and Air Domains
Integration Across Land, Sea, and Air Domains
Establishment of a Technological Base for Cross-Domain Operation
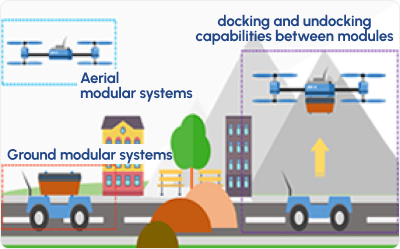 Precision Collaboration
Precision Collaboration
Development of Interoperable Docking Technologies Across Heterogeneous Systems
 Domain Expansion
Domain Expansion
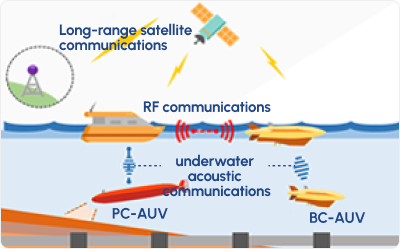
Extended Collaborative Operations on and Below the Sea Surface