한국항공우주연구원
Mobile GnbUnmanned Vehicle
4th Industrial Revolution Technology's Concentration, Unmanned Vehicle
Unmanned Vehicle
Development of unmanned vehicle technologies
An unmanned vehicle is a vehicle that recognizes the external environment on its own without human help, decides the situation, and performs its mission. A drone is a typical vehicle. It is expected to create a new driving force in various fields such as agriculture and transportation as it can replace humans in jobs that require a long time. In response to the surge in demand for unmanned vehicles, KARI supports the development of common technologies applicable to various types of vehicles and technology demonstration vehicles capable of high-level integrated operation in multiple environments of land, sea, and air. Additionally, it supports the development of UTM (UAV Traffic Management) technologies to monitor and control traffic of low-altitude UAVs. It also supports small UAV base technology to improve the performance of small UAVs and small UAV technology linked to PPI (Public Procurement of Innovation). The main goal is to secure innovative, original technologies that can take an early lead in the next-generation unmanned vehicle market and increase technological competitiveness by developing a system for integrated operation, such as cooperation, docking-undocking of heterogeneous multiple unmanned vehicles.Expanded technology transfer to related business
As the number of unmanned vehicles companies continues to increase, KARI is gradually expanding the targets for technology transfer by regularly identifying companies' needs for technology transfer during each project. Moreover, it plans to support and utilize the conversion of original technologies developed by the project into products and services by linking to commercialization and start-up support programs implemented by other agencies. As the demand for unmanned vehicles capable of performing high-level intelligent missions is expected to grow rapidly, KARI plans to focus on securing innovative technologies that can take an early lead in next-generation markets by developing integrated operations that can overcome the constraints of the operating environment.Unmanned Vehicle
Interoperability among multiple and heterogeneous vehicles
KARI is developing common original technologies in six categories for six advanced unmanned vehicle types that can be applied for land, sea, and air missions to develop mission-customized, high-performance unmanned vehicles and secure interoperability between multiple and heterogeneous vehicles. Common original technologies include data acquisition/analysis/processing, information exchange by controllers-to-vehicles connection or vehicles-to-vehicles connection, situation awareness/decision making processing, task execution and power supply. KARI is developing alternative navigation technologies based on detection and recognition to operate in indoor environment or BVLOS areas, focusing on securing original technologies in the field of vehicle communications with weak technical levels while developing technologies to prevent illegal activities by improving communication safety and reliability.
It first develops situation aware technology for the vehicle to self-determine the situation and perform tasks accordingly and seeks cooperation between vehicles as a long-term goal (autonomous intelligence). Moreover, it plans to develop a lightweight, high-efficiency electric drive system for unmanned vehicles as well as new-concept technologies for power sources and mobility, such as a distributed electric propulsion system, by linking different power sources.
According to the interaction level, KARI defines three research steps as direct control, supervision, and collaboration and the research is sequentially progressed from control method development to cooperative technology development (HMI). Advanced system engineering technology for autonomous unmanned vehicles is developing. Flapping or morphing structure, conformal load-bearing antenna structures, structural electronics and composite material 3D-printing technology are developing by the hardware research team.


- GoalDevelopment of original technologies that are commonly applied to various types of unmanned vehicles
- Related technologiesDetection/Recognition, communications, autonomous intelligence, power source and moving, HMI, and systems integration
Development of unmanned vehicles for technical demonstration of integrated operation.
KARI is developing next-generation unmanned vehicle technologies that reflect future technological, social, and cultural changes to lead the global market. It establishes a technology foundation for integrated operation between heterogeneous environments in the areas of land, sea, and air through research on autonomous and cooperative unmanned vehicles. Unmanned vehicles on land, sea, and air do not depend on fixed communication infrastructure on the ground or at sea but form a network through direct communication with other types of unmanned vehicles and perform the common mission given by autonomous intelligent cluster operation technology through cooperation between unmanned vehicles without human operator intervention. KARI develops precision cooperation technology, including docking and undocking between heterogeneous types, through research on UAV and UGV. The UAV and UGV system can be used for a 24-hour autonomous unmanned delivery system through the docking-undocking operation. UAV for long-distance transport are capable of vertical takeoff and landing and cruising in fixed-wing mode, and UGV for short-distance delivery can deliver items to final destinations through autonomous driving in the city.- GoalDevelopment of vehicle to demonstrate integrated operational technology such as common use for land, sea, and air missions and cooperation between heterogeneous unmanned vehicles
- Related technologiesAutonomously cooperative land, sea, and air unmanned vehicles, land and air docking-undocking unmanned vehicles, and underwater/on-water cooperative hybrid unmanned vehicle technologies
Strengthening of SMEs’ technical capability related to small unmanned aero vehicles
KARI supports the expansion of SMEs’ technology capabilities by developing and distributing basic technologies to improve the performance of small UAVs. It also supports the development and commercialization of services by developing high-performance / new-concept technologies and new-concept parts to use small unmanned aero vehicles and create the early service market. To this end, KARI has distributed the technologies for drone propulsion system design and performance prediction, coping with bad weather, and mission-critical computer utilization to help SMEs including venture enterprises and enhance their market competitiveness by reducing trial and error, cost, and time of developing small unmanned aero vehicles. Moreover, it released and distributed CLOUDS, an initial design program for the performance analysis of multicopter-type small unmanned vehicles, free of charge to the public.Development of high-performance systems based on requirements by public institutions
Additionally, KARI developed a small high-performance small unmanned vehicle systems with a new concept based on the demand for the use of small unmanned vehicles by government ministries and public institutions. In particular, it supported the creation of an initial market as the technology development outcome of SMEs and venture enterprises with regard to small unmanned vehicle, based on the establishment of a small unmanned vehicle technology development support system in connection with a public innovative procurement program between the Ministry of Science and ICT and the Public Procurement Service.
It improved the technological competitiveness of domestic small unmanned vehicles in the short term through technology development support and public procurement linkages in small unmanned vehicles and spread the integrated technology management to promote related industries.
Additionally, under the Project Group’s supervision, the requirements for the above areas regarding demands on sites were presented, and the management and coordination of each project were carried out. KARI improved field applicability through the evaluation and integrated demonstration of research output and supported commercialization through support for SMEs' technology bottlenecks and technology transfer and diffusion.
Based on these projects, KARI identified a total of nine programs. They included a multipurpose defense unmanned flight system for military use in December 2018, a complex sensor and image system for real-time weather observation mounted on a small unmanned aero vehicle, and a hybrid unmanned aero vehicle system for monitoring red tide and marine pollution in August 2019; a hybrid unmanned aero system for coastal safety mapping (July 2020) entered the public procurement market following its designation as an excellent procurement product by the Public Procurement Service.
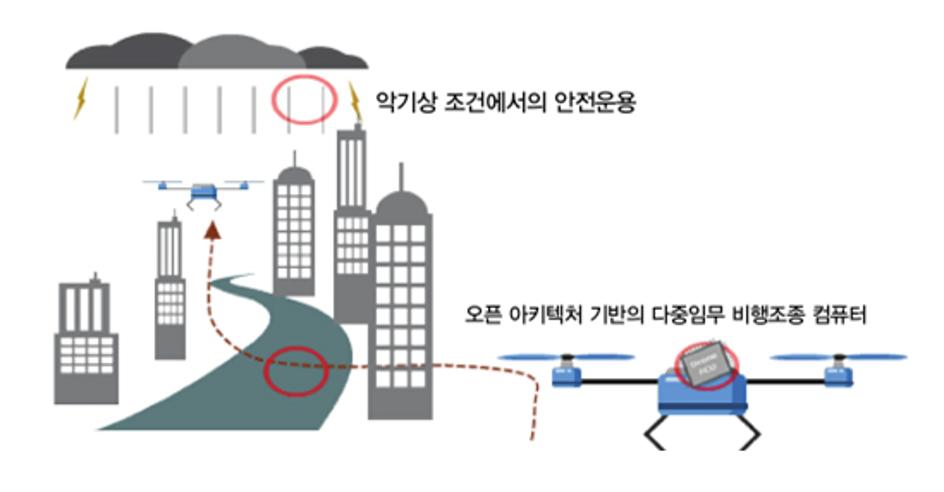
- GoalDevelopment and distribution of base technologies to improve the performance of small unmanned aero vehicles
- Related technologiesDrone propulsion system design and performance prediction, coping with bad weather, utilization of mission-critical computers, performance analysis and initial design program of multicopter-type small unmanned aero vehicles
Activities related to research project management, verification of research outcome, etc and so on
KARI’s Unmanned Vehicle Project Group led the project to develop core technologies for unmanned vehicles, carrying out various activities including research project management, technology verification, performance management, project PR, and international exchange/cooperation as well as support for policymaking by the government. Its activities resulted in 110 patents pending, 28 patents registered, 368 papers published including 60 papers of SCI journals, 64 prototypes manufactured, and 6 technology implementation agreements. As a follow-up project, the unmanned vehicle original source proprietary technology development project commenced in 2020, and supports six research groups for common original technology and three research groups for technology demonstrator vehicles.
Moreover, it has conducted Korea’s first annual survey of the unmanned vehicle industry since 2017. The survey covers a wide range of items such as industry composition, sales, regional distribution, human resources, investment, and intellectual property rights to support government policy establishment. This survey is published and provided to the relevant agencies. Additionally, the “Unmanned Vehicle Enterprise Directory” has been published annually, and distributed .in free of charge at exhibitions and conferences. These directory books have been playing a role as an information center by collecting and sharing the valuable information between the relevant industries. .
- Research outcomes110 patents pending, 28 patents registered, 368 papers published (including 60 papers of SCI journals), 64 prototypes manufactured, and 6 technology implementation agreements
Improvement of efficiency and stability of aerial traffic
The use of unmanned vehicles in private and public sectors is increasing as the technology has advanced. New systems and technologies to improve air traffic efficiency and safety are required as the demand for flight is rapidly increasing. KARI is developing core technologies for security and unmanned vehicles for low-altitude traffic management systems. The main goal is to demonstrate the traffic management system in low-altitude airspace by developing precision navigation technology for the efficient and safe use of multiple UAVs.
Moreover, KARI is developing mounting on-board devices for direct information exchange between unmanned vehicles. It is also developing technologies to prevent hacking of UAV traffic management systems, detect unauthorized unmanned vehicles, and suppress illegal activities through traffic management system security technology.
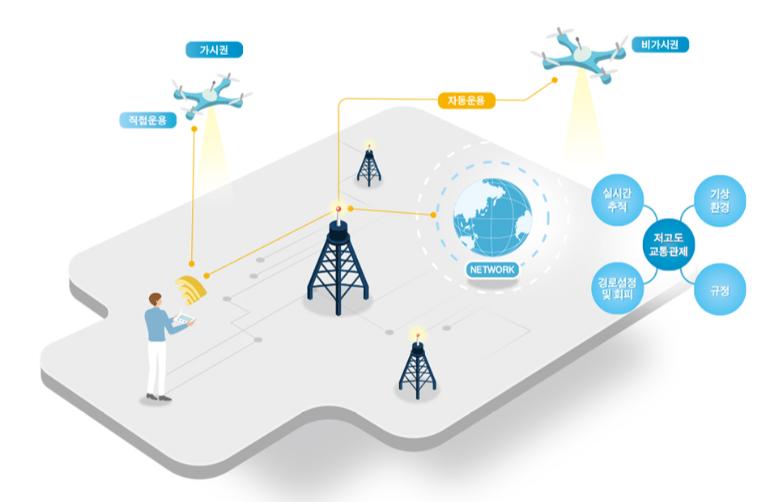
To Organize a low-altitude traffic management system, many systems are required; a registration system for an unmanned vehicle operator and businessman, a cloud-based central computer system to track and monitor unmanned vehicles, a user access system that enables vehicle- operating individuals or enterprises to submit a flight plan and have it approved anytime, anywhere, and a wireless communication network for drone traffic management by connecting the drones and the traffic management system.
The development of a low-altitude traffic management system for the safe operation of unmanned vehicles and the demonstration research began in April 2017, and the second-phase project is currently underway. In 2020, the precision navigation flight of nine small drones equipped with LTE communication modules with security functions was demonstrated as an intermediate outcome in Phase 2. KARI plans to introduce a cloud-based system for flying multiple drones in the BVLOS area, managing airspace, and managing traffic by the end of 2022 when Phase 2 is completed.
- GoalDevelopment of security and unmanned vehicle core technologies for low-altitude UAV traffic management system
- Related technologiesDemonstration of UAV traffic management system in low-altitude airspace, Development of small-size/light-weight/low-power device and security technology for the UAV traffic management system
