정기간행물 등록번호 유성사00001
제14권 제2호 2016년 12월 1일
정기간행물 등록번호 대전사01013

정기간행물 등록번호 유성사00001
제14권 제2호 2016년 12월 1일
정기간행물 등록번호 대전사01013

항공우주산업기술동향
Current Industrial and
Technological Trends in Aerospace
제14권 제2호
/목/차/
1. 미국의 지구관측위성 자료센터 운영 현황 ………………………………………………………
국가위성정보활용지원센터 검보정품질관리팀
임효숙, 이동한
2. 무인기 상업화를 위한 규정 개정에 관한 연구 ……………………………………………………
항공연구본부 항공기획팀
오경륜, 홍승범, 정기훈, 안오성
3. 지구관측 위성 프로그램 기획 전략- 미국과 유럽 사례 중심 …………………………………
미래전략본부 우주정책팀
김은정
미래전략본부
황진영
4. 우주분야 품질인증 제도에 대한 고찰 ………………………………………………………………
미래전략본부 우주정책팀
임창호, 황진영, 임종빈, 박정호
위성연구본부
박근영
3
11
18
28
http://library.kari.re.kr에서 보실 수 있습니다.
산업·정책동향
43
55
67
1. 우주 폐기물(쓰레기) 제거 방식에 대한 고찰 ………………………………………………………
위성연구본부 우주시험실
최준민
2. Transformative Vertical Flight 개발 및 기술 동향 ………………………………………………
항공연구본부 회전익기연구팀
박중용
3. 미국의 정지궤도 기상위성 개발 동향 ………………………………………………………………
위성연구본부 정지궤도복합위성쳬계팀
남문경
기술동향

제14권 제2호
/목/차/
http://library.kari.re.kr에서 보실 수 있습니다.
4. 전자장 해석 툴을 이용한 회로기판의 전자파 간섭 예측 ……………………………………
한국형발사체개발사업본부 발사체전자팀
황수설, 김명환, 마근수
5. 발사통제시스템 성능 개선을 위한 HPC 기술 동향 …………………………………………
나로우주센터 비행안전기술팀
신동영, 한유수, 최용태
6. 위성 운영 궤도 데이터 양식의 국제 표준화 동향 ……………………………………………
국가위성정보활용지원센터 저궤도위성관제팀
정옥철, 김화영, 성재동, 안상일
7. 우주 구조재의 우주방사선 검증 기술 …………………………………………………………
융합기술연구본부 항공우주응용재료팀
정지연, 윤용식, 민경주
8. LLVM: 탑재소프트웨어 개발을 위한 차세대 컴파일러 기술 ………………………………
위성기술연구단 위성비행소프트웨어팀
박수현, 최종욱
9. 소형 무인기의 오픈아키텍처 기반 비행제어/임무컴퓨터 개발 현황 ………………………
항공연구본부 항공전자연구팀
윤원근, 최인호, 김태식
10. NASA 우주시스템 전자파규격 기술동향 ……………………………………………………
위성연구본부 우주시험실
김태윤, 장재웅, 장경덕, 문귀원
11. 500Kg급 중형위성 표준본체 전기시스템 설계개념 …………………………………………
위성연구본부 차세대중형위성체계팀
박종오, 전현진
충남대학교 전자공학과
나성웅
12. 저고도 무인기 교통관리 시스템 해외 기술 동향 ……………………………………………
위성항법·응용기술센터 차세대항행팀
권지현, 홍성권, 은연주, 전대근
77
84
94
99
106
116
124
132
138
항공우주산업기술동향
Current Industrial and
Technological Trends in Aerospace
항공우주산업기술동향 14권 2호
산업·정책동향

항공우주산업기술동향 14권 2호 (2016) pp. 3~10
http://library.kari.re.kr
에서 보실 수 있습니다.
산업·정책동향
미국의 지구관측위성 자료센터 운영 현황
임효숙*
1 )
, 이동한*
Earth Observation Satellite Data Centers of USA
Lim, Hyo-Suk*, Lee, Dong-Han*
ABSTRACT
In the United States, there are NASA(National Aeronautics and Space Administration),
NOAA(National Oceanic and Atmospheric Administration), USGS(United States Geological
Survey) Earth observation satellite data center run by each institution. NASA has
DAACs(Distributed Active Archive Centers) for distribution of EOS(Earth Observing System)
satellite data. NOAA has NCEI(National Centers for Environmental Information) Earth
observation satellite data center under the NESDIS(National Environmental Satellite Data and
Information Services), and distributes low earth orbit and geostationary orbit meteorological
satellite data, and value-added products. USGS EROS(Earth Resources Observation and
Science) center distributes the oldest Earth observation satellite in the world, Landsat series,
Corona satellite data, aerial photography, cartography, and topography data. The main
challenge of data centers in the United States is preparation for innovative improvements of
data service system due to the amount of data increases exponentially.
초 록
미국에는
NASA, NOAA, USGS 각 기관별로 운영하는 지구관측위성 자료센터가 있는데,
NASA는 지구관측위성 프로그램의 핵심인 EOS 시리즈 중심으로 NASA 개발, 운영 위성자료를
미국 전역에 있는
DAACs를 통해서 서비스를 하고 있다. NOAA는 NESDIS 산하에 NCEI 라는
지구관측위성 자료센터를 두고 있는데
, 저궤도 및 정지궤도 기상위성자료 및 부가생성물을 서비
스하고 있다
. USGS EROS 센터에서는 세계에서 가장 오래된 지구관측위성 시리즈인 Landsat 자
료
, 냉전시대 정찰위성인 Corona 위성자료, 각종 항공사진, 지도제작에 필요한 자료, 지형도도
서비스하고 있다
. 미국의 주요 지구관측위성 자료센터들이 당면한 문제는 기하급수적으로 증가
하는 자료량에 대비하여 서비스시스템을 혁신적으로 개량해 나아가는 것이다
Key Words : Earth Observation Satellite(지구관측위성), Data Center(자료센터), Satellite Data
(위성자료)
* 임효숙, 이동한, 한국항공우주연구원, 국가위성정보활용지원센터 검보정품질관리팀
hslim@kari.re.kr, dhlee@kari.re.kr
4
임효숙 외 / 항공우주산업기술동향 14/2 (2016) pp. 3~10
1. 서 론
미국이 지구관측위성을 본격적으로 개발하고 발
사한 역사는
1960년에 미국 최초의 기상위성인
TIROS-1(Television and InfraRed Observation
Satellite)을 비롯하여, 냉전시대에 정찰위성으로 주
로 활용되었던
Corona, 1972년 발사되기 시작한
Landsat(Land Satellite) 시리즈, NASA(National
Aeronautics and Space Administration) 지구관측
위성 프로그램의 핵심인
EOS(Earth Observing
System) 시리즈, NOAA(National Oceanic and
Atmospheric Administration) 저궤도 및 정지궤도
기상위성 등이 있다
.
본 논문에서는 미국의 주요 지구관측위성 자료
를 수신
, 처리, 배포하고 있는 NASA, NOAA,
USGS(United States Geological Survey) 내 데이터
센터 운영 현황에 대해 살펴봄으로써
, 향후 국내
개발
/운영 위성이 다양해 짐에 따른 다양한 데이
터센터 운영 전략수립에 기여하고자 한다
.
2. 본 문
미국의 지구관측위성 개발을 주도하고 있는
NASA는 NOAA와 USGS가 운영하고 있는 위성
을 개발하여 초기운영과 검보정 후 정상운영을
수요기관으로 넘겨주는 방식을 취했었다
. 그러나
NOAA는
GOES(Geostationary
Operational
Environmental Satellite)-R 개발 시 이전과는 달
리
NOAA 주도개발을 시도해 개발기간이 수년
연장되어 미국정부로부터 강력한 감사를 받기도
하였다
.
NASA, NOAA, USGS가 운영하고 있는 지구관
측위성은 기획 초기부터 사용자의 요구사항을 최
대한 반영하려는 노력을 하고 있다
. 그래야만 생성
되는 자료의 품질도 훨씬 높아질 뿐 아니라 자료
활용도 훨씬 많아질 것이기 때문이다
.
NASA, NOAA, USGS가 주도적으로 운영하고
있는 지구관측위성자료는 분야별로 특화되어 있다
고 할 수 있다
. NASA는 EOS 위성시리즈, NOAA
는 정지 및 저궤도 기상위성시리즈
, USGS는
Landsat 위성시리즈 자료를 중점적으로 수신, 처
리
, 배포, 활용을 촉진하고 있다.
2.1 NASA 지구관측위성 자료센터
NASA 지구관측위성자료는 전 세계 누구나 사
용 가능하다는 매우 개방적인 자료정책을 가지고
있다
. 이와 같은 개방성과 고품질의 자료를 신속하
게 다운로드받을 수 있는 시스템 구축으로 인해
,
전 세계 원격탐사 연구자들이 가장 많이 이용하
고 있다
.
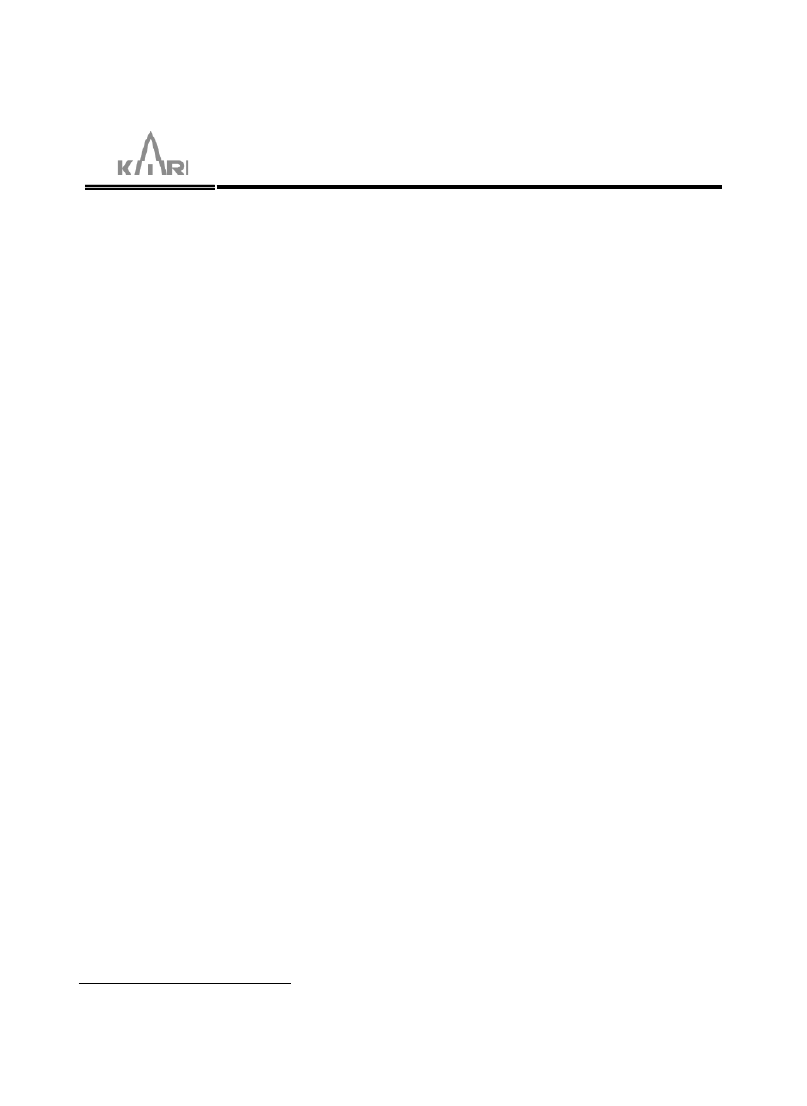
<그림 1>은 2014년도에 NASA
EOSDIS(Earth Observing Data and Information
System)에서 배포한 자료의 국가별 현황인데, 우리
나라는
7위를 기록하고 있다.
출처
: 참고문헌 [1]
그림
1. 2014년도 NASA EOSDIS 자료의
국가별 배포 현황
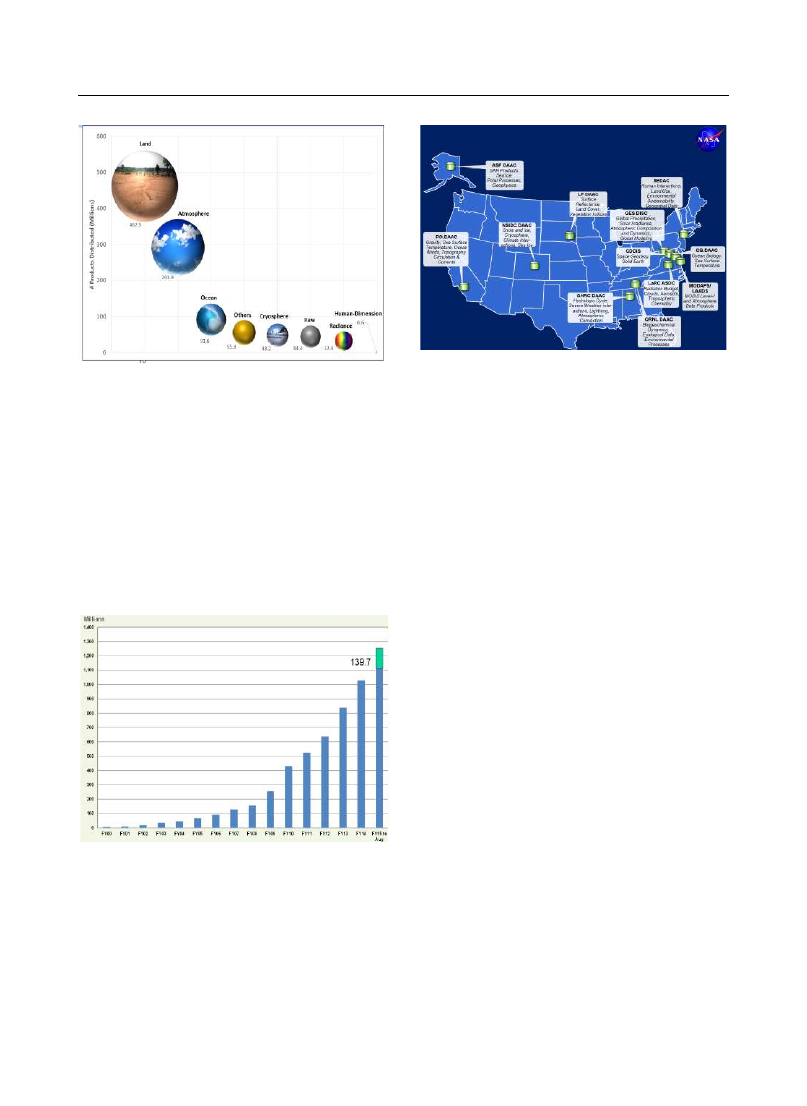
NASA EOSDIS를 통해 2014년 배포된 지구관측
위성 자료를 유형별로 보면
<그림 2>와 같다. 육
상자료의 배포가
463백만 건으로 가장 많았고, 대
기 자료는
292백만 건으로 2위를, 해양자료가 92
백만 건으로
3위를 기록하였다.
임효숙 외 / 항공우주산업기술동향 14/2 (2016) pp. 3~10
5
출처
: 참고문헌 [1]
그림
2. 2014년도 NASA EOSDIS 자료의
유형별 배포 현황
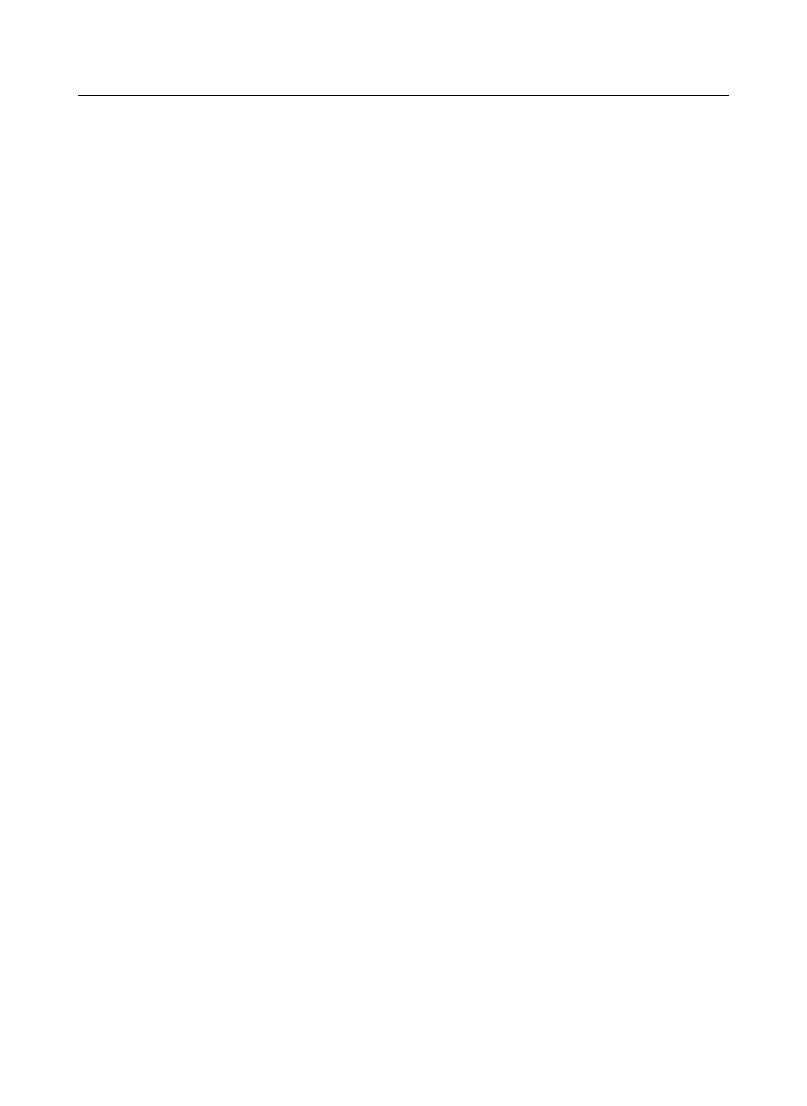
NASA EOSDIS를 통해 2000년부터 2015년8월까
지 배포한 자료량은
<그림 3>과 같다. 2007년에
100백만 건 이상 되기 시작하였고, 2009년에 200
백만 건 이상 후 급속도로 증가하여
2015년 8월까
지 통계자료에 의하면
1,200백만 건 이상이 되고
있다
.
출처
: 참고문헌 [1]
그림
3. NASA EOSDIS를 통해 2000년 - 2015년
8월까지 배포한 자료량
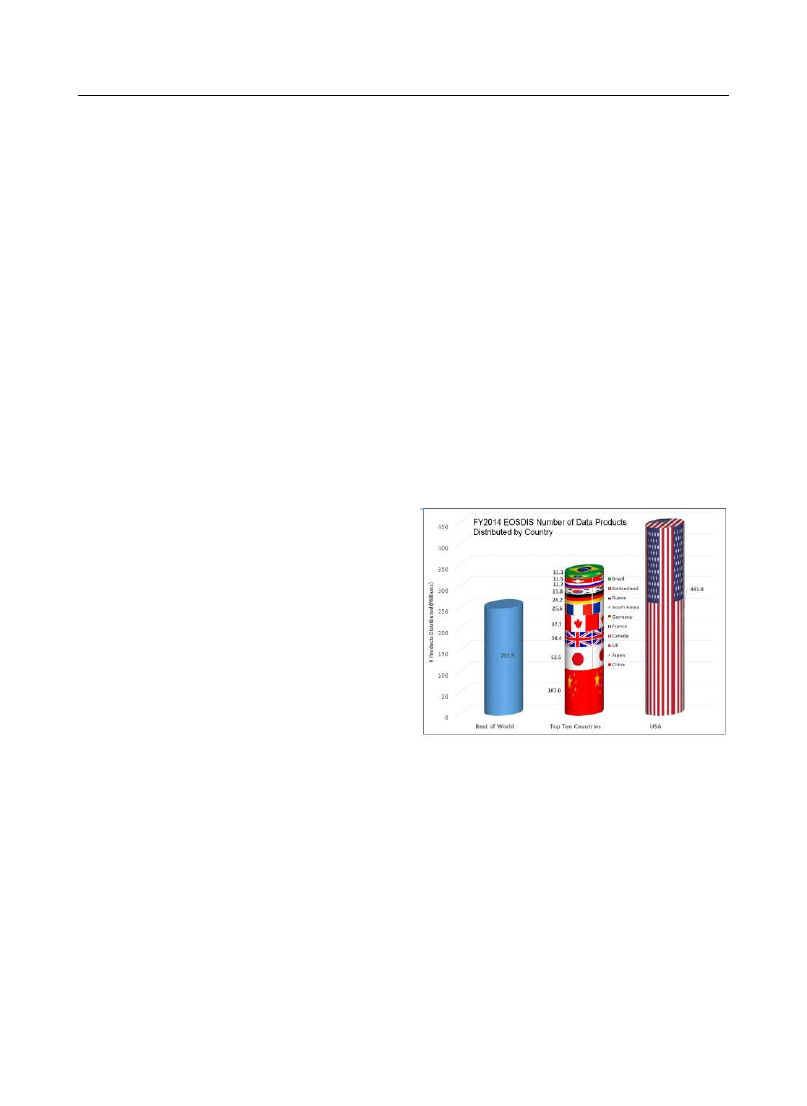
NASA에서 운영하는 자료센터는 <그림 4>처럼
미국 전역에 분포되어 있다
. 특정 자료센터에서 배
포하는 자료는 다른 자료센터에서 배포하는 자료
와는 중복되지 않도록 되어 있다
.
출처
: 참고문헌 [1]
그림
4. 미국 전역에 위치한 NASA 자료센터
ASF DAAC(Alaska Satellite Facility Distributed
Active Archive Center)는 알래스카주 페어뱅크에
위치한 알래스카 대학 내에 있다
. NASA의 국제협
력 파트너인
CSA(Canadian Space Agency),
ESA(European
Space
Agency),
JAXA(Japan
Aerospace Exploration Agency)에서 발사하여 운
용하고 있는
SAR(Synthetic Aperture Radar) 자료
를
NASA가 사전 승인한 연구자들에게만 배포하
고 있다
. SAR 자료를 사용하기 위해서는 NASA에
연구계획서를 제출
/승인을 받아야 한다. ASF
DAAC에서 다운로드 받을 수 있는 자료는 캐나다
RADARSAT-1,
ESA
ERS(European
Remote
Sensing Satellite)-1,2 SAR 자료, JERS(Japanese
Earth Resource Satellite)-1, ALOS(Advance Land
Observing Satellites) PALSAR(Phase Array type
L-band SAR) 자료 및 SAR 자료를 이용하여 추출
한 부가생성물이다
[4].
PO(Physical Oceanography) DAAC 은 캘리포니아
주 파사데나에 위치한
NASA/JPL에 있다. PO DAAC
으로부터 다운로드 받을 수 있는 자료는 중력
, 해수면
온도
, 해상풍, 해류, 해저지형 등이다. 이와 같은 생성
물은
OuikSACT(Quick Scatterometer), Jason(Joint
Altimetry
Satel ite
Oceanography
Network)-1,
MODIS(Moderate-resolution Imaging Spectrometer),
AVHRR(Advanced
Very
High
Resolution
Radiometer) 위성자료를 이용하여 추출하였다[4].
6
임효숙 외 / 항공우주산업기술동향 14/2 (2016) pp. 3~10
NSIDC(National Snow and Ice Data Center)
DAAC은 콜로라도주 보울더에 있는데 NASA, 콜
로라도대학
, NOAA가 공동협력으로 운영하고 있
다
. NSIDC DAAC으로부터 다운로드 받을 수 있
는 자료는 적설량
, 빙하, 해빙, 극지방에 관한 데이
터 등이다
.
이와 같은 생성물은
MODIS,
AMSR-E(Advanced
Microwave
Scanning
Radiometer-Earth
Observing
System),
GLAS(Geoscience Laser Altimeter System) 위성자
료를 이용하여 추출하였다
[4].
GHRC (Global Hydrology Resource
Center)
DAAC은
앨라바마주
헌츠빌에
있는데
NASA/MSFC(Marshall Space Flight Center) 와
앨라바마대학이 공동협력으로 운영하고 있다
.
GHRC DAAC으로부터 다운로드 받을 수 있는 자
료는 수자원자료
(강수량 포함), 번개, 대류, 악기상
등이다
. 이와 같은 생성물은 DMSP(Defense
Meteorological Satellite Program), TRMM(Tropical
Rainfall
Measuring
Mission)
LIS(Lightning
Imaging
Sensor),
GPM(Global
Precipitation
Measurement) 위성자료를 이용하여 추출하였다[4].
ORNL (Oak Ridge National Laboratory)
DAAC은 테네시주 오크리지에 있는데 NASA 와
에너지성
(Department of Energy) 산하 오크리지
국립연구소
(Oak Ridge National Laboratory)가 공
동협력으로 운영하고 있다
. ORNL DAAC으로부터
다운로드 받을 수 있는 자료는 지구화학역학
, 생태
학
, 환경처리 등이다. 이와 같은 생성물은 MODIS
위성자료를 이용하여 추출한 것과 각종 지상캠페
인을 통해 구축한 검보정 자료이다
[4].
LARC
ASDC(Langley
Research
Center
Atmospheric Science Data Center)는 버지니아주
햄프턴에 있는데
, NASA/LARC가 운영하고 있다.
LARC ASDC로부터 다운로드 받을 수 있는 자료
는 에어로솔
, 구름, 지구복사량, 대기화학 관한 데
이터 등이다
. 이와 같은 생성물은 CALIPSO(Cloud
Aerosol Lidar and Infrared Pathfinder Satellite
Observations), CERES(Clouds and the Earth's
Radiant Energy System), MOPITT(Measurements
Of Pollution In The Troposphere) 위성자료를 이
용하여 추출하였다
[4].
CDDIS(Crustal Dynamic Data Information
System)는
메릴랜드주
그린벨트에
있는데
NASA/GSFC(Goddard Space Flight Center)가 운
영하고 있다
. CDDIS로부터 다운로드 받을 수 있
는 자료는
Solid Earth, 우주측지 데이터 등이다.
이와 같은 생성물은
GNSS(Global Navigation
Satellite System), SLR(Satellite Laser Ranging),
VLBI(Very Long Baseline Interferometry) 위성자
료를 이용하여 추출하였다
[4].
GES DISC(Goddard Earth Science Data and
Information Services Center)는 메릴랜드주 그린벨
트에 소재하고 있는데
, NASA/GSFC가 운영하고
있다
. GES DISC로부터 다운로드 받을 수 있는 자
료는 전 세계 강수량
, 태양복사량, 대기조성/역학,
전 지구 모델링 데이터 등이다
. 이와 같은 생성물
은
Aqua, Aura, SORCE(Solar Radiation and
Climate Experiment), TRMM, GPM, UARS(Upper
Atmospheric Research Satellite) 위성자료를 이용
하여 추출하였다
[4].
MODAPS LAADS(MODIS Adaptive Processing
System Level 1 and Atmosphere Archive and
Distribution System)는 메릴랜드주 그린벨트에 있는
데
NASA/GSFC가 운영하고 있다. MODAPS
LAADS로부터 다운로드 받을 수 있는 자료는
MODIS Level 1 데이터 등이다. 이와 같은 생성물은
Terra, Aqua 위성자료를 이용하여 추출하였다[4].
OB(Ocean Biology).DAAC은 메릴랜드주 그린벨
트에 있는데
NASA/GSFC가 운영하고 있다.
OB.DAAC으로부터 다운로드 받을 수 있는 자료는
전 세계 해양 플랑크톤 데이터 등이다
. 이와 같은
생성물은
CZCS(Coastal Zone Color Scanner
Experiment),
SeaWiFS(Sea-Viewing
Wide
Field-of-View Sensor), OCTS(Ocean color and
Temperature Scanner), MERIS(Medium Resolution
Imaging Spectrometer), MODIS 위성자료를 이용
하여 추출하였다
[4].
SEDAC(Socioeconomic Data and Applications

임효숙 외 / 항공우주산업기술동향 14/2 (2016) pp. 3~10
7
Data Center)은 뉴옥주 펠리사데에 있는데
NASA와 콜롬비아대학이 공동운영하고 있다.
SEDAC로부터 다운로드 받을 수 있는 자료는 환
경의 지속성
, 지구환경과 인간과의 상호작용, 토
지이용 등에 관한 것이다
[4]. LP(Land Processes)
DAAC은 USGS와 NASA가 협력하여 운영하고
있다
.
이에
대해서는
USGS
EROS(Earth
Resources Observation and Science) 설명 시 자
세히 보완하겠다
.
NASA
ESDIS(Earth
Science
Data
and
Information System) 프로젝트는 NASA/GSFC에
서 주도적으로 추진하였으며
, EOS 자료를 수신,
처리
, 배포하는 시스템이다. EOS 표준자료의 대부
분은 탑재체 개발
PI(Principal Investigator)의 주
도적인 책임 하에 생성되고 있으며
, 생성 후
EOSDIS를 통해서 배포되고 있다. EOSDIS의 효율
적인 접속은 사용자와 전국에 분포되어 있는 자료
센터들을
(DAACs) 네트워크로 얼마나 잘 연결하느
냐에 달려 있는 것이다
.
2.2 NOAA 지구관측위성 자료센터
NOAA는
미국
상무성
(Department
of
Commerce) 산하기관인데, NOAA 내 위성센터인
NESDIS(National Environmental Satellite Data
and Information Services) 산하조직으로 <그림 5>
처럼
NOAA
지구관측위성
자료센터인
NCEI(National
Centers
for
Environmental
Information)가 있다.
출처
: 참고문헌 [2]
그림
5. NESDIS 조직도
NCEI는 <그림 6>에서 보는바와 같이 해양자료
센터
(NODC : National Oceanographic Data
Center),
지구물리자료센터
(NGDC
:
National
Geophysical Data Center), 기후자료센터(NCDC :
National Climatic Data Center)를 최근에 통합하
여 새로이 설립하였다
.
출처
: 참고문헌 [2]
그림
6. NCEI 설립 현황
NODC는 1961년 메릴랜드주 실버스프링에서
미국 해군 수자원연구소로 시작하여
, 2000년에
NOAA로 흡수되었고 연안 및 해양자료를 수집,
저장
, 배포해 왔다. NGDC는 1965년 콜로라도주
보울더에 설립되어 연안 및 측지자료를 수집
, 저
장
, 배포해 왔다. NCDC는 1951년 노스캐롤라이나
주 애쉬빌에 설립되어 기후자료를 오랫동안 수집
,
저장
, 배포해 왔다.
이와 같이
NODC, NGDC, NCDC 세 자료센터
가 병합되어 설립된
NCEI는 세계 최대의 기상 및
기후자료를 저장
, 배포하고 있다. NCEI는 <그림
7>에서 보는 바와 같이 미국 전역에 지역협력센터
를 두고 있다
.
NCEI에서 배포하고 있는 자료는 <그림 8>과 같
이 매우 광범위한 사용자들을 만족시키고 있다
. 이
와 같이 광범위한 사용자들을 만족시키기 위해서
NCEI는 서비스의 신속성과 정확성을 매우 중요하
게 생각하고 있다
. NCEI 배포자료는 지역뿐 아니
라 전 세계 당면문제인 재난재해
, 기후변화 등에
대처하는데 기초자료로 널리 활용되고 있다
.
8
임효숙 외 / 항공우주산업기술동향 14/2 (2016) pp. 3~10
출처
: 참고문헌 [2]
그림
7. 미국전역 내 NCEI 운영 현황
출처
: 참고문헌 [2]
그림
8. NCEI 자료와 사용자 범위
NCEI에서 2000년 - 2015년까지 수신, 저장하고
있는 자료는
<그림 9>와 같다. 2011년을 기점으로
하여 위성과 모델자료가 급증하고 있음을 알 수
있다
.
출처
: 참고문헌 [2]
그림
9. NCEI 저장 자료량의 연도별 변화
2030년까지의 예상 추이를 보면 <그림 10>과
같이
2020년을 기점으로 하여 자료량은 기하급수
적으로 증가하는 것을 알 수 있다
, GOES-R
ABI(Advanced Baseline Imager)로부터 기상자료가
본격적으로 수신되고
, 이와 관련된 모델링자료도
급증하기 때문인 것으로 예측된다
.
출처
: 참고문헌 [2]
그림
10. NCEI 저장 자료의 예상 추이
NOAA는 미국의 IT 기업들에게 기상레이더 자
료를 대량 공개해서 빅데이터 관련 비즈니스지원
을
<그림 11>과 같이 시범으로 시작하였다. 참여
한 기업들은 기상레이더 자료를
NOAA로부터 무
료로 제공받아서 이를 활용한 비즈니스로 인한 수
익 창출을 적극 추진하고 있다
.
출처
: 참고문헌 [2]
그림
11. NOAA 빅데이터 시범사업 수행 파트너
IT 기업체
2.3 USGS 지구관측위성 자료센터
USGS EROS 센터는 사우스다코다주 수폴스에
위치하고 있다
. EROS 센터는 지구관측위성 자료
임효숙 외 / 항공우주산업기술동향 14/2 (2016) pp. 3~10
9
중 세계에서 가장 오래된
Landsat 자료를 수신, 처
리
, 배포하고 있고, 관련한 지상국 개발도 주도적
으로 진행하고 있다
. Landsat 자료는 1972년부터
현재까지 전 세계를 지속적으로 촬영하고 있다
.
<그림 12>처럼 매년 3백만 장 이상의 Landsat 영
상이 전 세계 사용자들에게 무료로 제공되고 있다
.
2013년 2월에 발사된 Landsat 8 영상 또한 전 세
계 원격탐사 연구자들이 애용하는 자료가 되었다
.
출처
: 참고문헌 [3]
그림
12. USGS EROS 센터에서 배포중인 Landsat
자료
USGS EROS 센터에서는 <그림 13>에서 확인할
수 있듯이
Landsat 자료 이외에 냉전시대 정찰위
성으로 활용하였던
Corona 위성자료, 재난재해 발
생 시 전 세계 위성자료
, 각종 항공사진, 지도제작
에 필요한 자료
, 지형도도 저장, 배포하고 있다. 뿐
만 아니라
EROS 센터에서는 보유하고 있는 자료
를 이용하여
<그림 14>처럼 미국 및 전 세계지역
에 대한 각종 활용 사례들을 제작하여 정책결정자
들에게 활발히 제공해 오고 있다
.
출처
: 참고문헌 [3]
그림
13. USGS EROS 센터에서 저장, 배포중인 자료
출처
: 참고문헌 [3]
그림
14. USGS EROS 센터에서 제작한
농업 관련 활용 사례
LP(Land Processes) DAAC은 EROS 센터에 있
는데
, NASA가 연구비를 지원하고 NASA-USGS
가 기관 간 협정을 맺어
1990년부터 운용중이다.
ASTER(Advanced Spaceborne Thermal Emission
and Reflectance Radiometer) 와 MODIS 자료를
이용하여 육상에 관한 부가생성물
(예: 식생지수)
및 표준자료를
<그림 15>와 같이 서비스하고 있
다
. 사우스다코타대학, 메릴랜드대학, 애리조나대학
이 협력하고 있다
. LP DAAC을 위해서 NASA와
USGS는 통합시스템을 구축하여 운영 중이며, 자
료는
USGS 네트워크를 통해서 배포중이다. LP
DAAC 운영권은 2020년에는 USGS로 완전히 이양
될 계획이다
.
출처
: 참고문헌 [3]
그림
15. LP DAAC을 통해 배포된 자료량

10
임효숙 외 / 항공우주산업기술동향 14/2 (2016) pp. 3~10
USGS
EROS
센터는
인터내셔널
차터
(International
Charter
‘Space
and
Major
Disasters’, 이후 ‘차터’)에 주도적으로 참여하고 있
다
. 차터는 지구관측위성을 보유한 세계의 16개 우
주개발 기관들이 자발적으로 참여하여
, 전 세계 대
규모 지진
, 태풍, 해일, 폭우, 폭설, 화재 등 재난발
생시 위성영상을 신속하게 촬영하여 제공함으로써
재해 상황 파악 및 복구를 지원하는 국제협력 프
로그램이다
.
우리나라는 한국항공우주연구원이
2011년 차터에 가입한 후 활발히 활동 중에 있다.
3. 결 론
미국이 본격적으로 지구관측위성을 개발
, 발사,
운영한 지는
60여년이 되어간다. 본 논문에서 자세
히 살펴보았듯이
NASA, NOAA, USGS는 각 기관
별로 운영하는 지구관측위성자료센터가 있다
.
NASA는 지구관측위성 프로그램의 핵심인 EOS 시
리즈 중심으로
NASA 개발, 운영 위성자료를 미국
전역에 있는
DAACs를 통해서 서비스를 하고 있
다
. 각 지역에 있는 DAAC은 다른 지역과는 차별
화된 자료를 수신
, 저장, 배포하고 있다. NOAA는
NESDIS 산하에 NCEI 라는 지구관측위성 자료센
터를 두고 있는데
, NODC, NGDC, NCDC를 최근
에 통합하여 새로이 설립하였다
. NOAA에서 운영
하는 저궤도 및 정지궤도 기상위성자료 및 부가생
성물을 서비스하고 있다
. USGS EROS 센터에서
는 세계에서 가장 오래된 지구관측위성 시리즈인
Landsat 자료, 냉전시대 정찰위성으로 활용하였던
Corona 위성자료, 각종 항공사진, 지도제작에 필
요한 자료
, 지형도도 서비스하고 있다.
미국의 주요 지구관측위성 자료를 수신
, 처리,
배포하고 있는
NASA, NOAA, USGS가 수신, 처
리
, 배포하고 있는 자료는 기관의 특성상 고유영역
별로 잘 배분되어져 있고
, 기관별로 볼 때는 지역
에 적절히 분포되어 있으며 그 지역의 특성을 최
대한 살리고 있다는 점이다
. 세 기관의 자료센터들
이 당면한 문제는 기하급수적으로 증가하는 자료
량에 대비하여 서비스시스템을 혁신적으로 개량해
나아가는 것이다
. 지구관측위성 자료는 공공 및 연
구자들을 위해 사용될 뿐 아니라
, 최근 NOAA는
미국의
IT 기업들에게 기상레이더 자료를 대량 공
개해서 빅데이터 관련 비즈니스지원을 시범으로
시작하였다
. 참여한 기업들은 기상레이더 자료를
NOAA로부터 무료로 제공받아서 이를 활용한 비
즈니스로 인한 수익 창출을 적극 추진하고 있다
.
참고문헌
1. Update on NASA's Earth Observing Data and
Information System(EOSDIS), September
2015, CEOS WGISS
2. From Prehistoric Ice Cores to Modern Satellite
Observations-From the Depths of the Ocean
to the Surface of the Sun, May 2016,
KARI-NOAA/NECI meeting
3. USGS Eros Center : Data Access, Archiving
and Distribution, 2013
4. https://earthdata.nasa.gov/about/daacs

항공우주산업기술동향 14권 2호 (2016) pp. 11~17
http://library.kari.re.kr
에서 보실 수 있습니다.
산업·정책동향
무인기 상업화를 위한 규정 개정에 관한 연구
오경륜
*, 홍승범*, 정기훈*, 안오성*
A Study on Regulation Amendments for Commercial
UAV
Oh, Kyung-ryoon*, Hong, Seung-Bum*, Chung, Ki-hoon*, Ahn, Oh-Sung*
ABSTRACT
After announcing the Amazon’s plans of door-to-door delivery system using small drones and
getting spotlight of DJI’s small drone in the consumer market, For commercial UAV utilization,
UAV regulation amendment and designating UAV special zone activities are going on in in each
nations. In Korea, to expanding the commercial use of UAVs related regulation amendments and
pilot project are constantly in progress. Even though technology development and social acceptance
are required for commercial UAV, this paper presents the proposed new regulation for commercial
use of UAVs in the public sector.
초 록
아마존이 소형무인기를 이용한 택배시스템 계획을 발표한 이후
, DJI사의 소형무인기가 소비자
시장에서 각광을 받기 시작한 이후
, 무인기 법 규정 정비, 무인기 특구 지정 등 무인기의 상업적
활용을 위한 준비가 전 세계 각 국가에서 진행되고 있다
. 국내에서도 무인기의 상업적 활용 확
대를 위해 관련 법 규정의 정비가 지속적으로 진행 중에 있으며
, 특구지정, 시범사업 등이 추진
중에 있다
. 상업적 무인기 활용을 위해서는 기술개발과 사회적 수용, 관련 제도정비 등이 필요하
나
, 본 논문에서는 초기 무인기 상업화를 선도할 공공분야에서 무인기의 상업적 활용에 필요한
법 규정 개정부분에 대해 살펴보기로 한다
.
Key Words : Small UAV(소형무인기), commercial UAV(상업무인기), UAV regulation amendment
(무인기 규정 개정), BVLOS(비가시권), Aerial Work(무인기 활용사업)
* 오경륜, 홍승범, 정기훈, 안오성 한국항공우주연구원, 항공연구본부 항공기획팀
bigoh@kari.re.kr, sbhong@kari.re.kr, khchung@kari.re.kr, ohsung@kari.re.kr

12
오경륜 외 / 항공우주산업기술동향 14/2 (2016) pp. 11~17
1. 서 론
2016년 8월 2일 미국 백악관 OSTP(Office of
Science and Technology Policy) 주관으로 개최된
‘The Future of UAS and Aviation’워크샾 발표[1]
에서 인텔사
CEO는 무인기 상업적 활용을 위해서
는 기술적 혁신과 협업 생태계
, 그리고 무인기 관
련 정책 및 규제의 리더쉽을 강조했다
. 내풍성 증
대
, 배터리 용량 증대 등의 추가적인 기술적 혁신
이 필요함과
, 제도적 측면에서 무인기 상업적 운항
안전 요구도 제시가 필요함을 역설했다
. 제도적 요
구도가 제시되면 기업은 그 요구도를 만족하기 위
한 기술과 제품개발에 매진하겠다는 것이다
.
미국
FAA는 소형무인기 관련 미래 정책, 법 정
책 등의 우선순위 설정에 도움을 줄 민간 자문위
원회를 구성하였는데
, 인텔 CEO Brian Krzanich는
초대 위원장으로 활동 중으로
, 워크샾에서의 그의
주장은 상당부분 무인기 관련 정책과 법 규정에
반영될 것으로 예상된다
.
본 논문에서는 무인기 상업화를 위한 법 규정
개정의 주요 이슈와 각 국의 관련 법 규정 현황
및 주요 내용을 분석하고 향후 국내 관련 법 규정
개정부분에서 고려해야 할 부분들에 대해 살펴보
기로 한다
.
2. 주요국 관련 규정 개정 현황
무인기의 상업적 활용에 관심이 있는 세계 주요
국들은 무인기의 상업적 활동을 지원할 관련 제도
정비를
2015년 이후부터 서두르고 있다. 그 주된
핵심은
25kg급 이하 무인기의 비가시권 비행의 허
용과 상업적 활용 허용범위 확대이다
.
2.1 미국
2016년 8월 29일 발효된 FAA의 소형 무인기 상
업적 허용법안이 선언적인 내용에 그친 데 반해
,
2016년 8월 2일 백안관 OSTP 워크샾에서, FAA는
보다 구체적인 활동 및 일정을 제시하였다
.[2]
‣ 무인기 안전팀 신설 : 유인기 분야의 민간항공
기 안전위원회 및 헬기 안전위원회 노력의 결
과를 반영하여 무인기 사고안전 증진 도모
⁃ 무인기 사용자 항공규칙에 대한 교육 강화
⁃ 무인기 안전비행 방법에 대한 교육 강화
‣ 소형무인기 자문위원회 구성 : 소형무인기 관련
미래 정책
, 법 정책 등의 우선순위 설정에 도움
을 줄 민간 자문위원회 구성
‣ Pathfinder 프로그램 진행 : 민간 산업과의 파
트너쉽을 통해 현 법 규정이 수용하지 못하는
대상에 대한 연구 프로그램 진행
⁃ CNN, precisionHawk, BNSF railroad 회사
등과 협력하여 도심 및 군중 상공에서의 무
인기 운용
, 비가시권(BVLOS)에서의 무인기
운용에 대한
pathfinder 프로그램 진행 중
⁃ 이 프로그램을 통해 획득된 자료는 FAA test
site에서 다음 법 개정 등을 위해 검증절차에
돌입
FAA는 2016년 말까지, 무인기의 군중 상공 운
용비행에 대한 법안을 제안할 예정이다
. 미국은
2016년 말을 기점으로 본격적인 소형 상용 무인기
시대가 도래 할 것으로 예측된다
. 또한 민간산업
부분의 소형무인기 자문위원회 참여와
Pathfinder
프로그램이 진행됨에 따라 미국
FAA는 상업 친화
적인 소형 무인기 규칙을 정비해 나갈 것으로 기
대되며
, 이를 통해 세계 소형 상업 무인기 법 규정
정비를 선도해 나갈 것으로 예측된다
. 소형 상업
무인기 운용 데이터 축적시스템 구축에 심혈을 기
울이는
FAA 노력은 결국 미국 내 다양한 분야에
서의 안전한 무인기 상업적 활용을 보장할 것으로
기대된다
.
2.2 핀란드
스마트폰 기술력을 바탕으로 한
IT 관련 기술강
국이고
, 인구 밀도가 희박하여 비가시권 비행운항
관련 기술개발을 위한 최적의 공역자원 풍부한 핀
란드는 이러한 여건을 자국의 무인기 산업 성장

오경륜 외 / 항공우주산업기술동향 14/2 (2016) pp. 11~17
13
동력원으로 끌어올리기 위해 운용자 스스로의 판
단과 책임을 강조한
25kg 이하 무인기 운용 관련
한 세계적으로 가장 진보적인 항공법을
2015년 10
월 도입하였다
.[3]
취미
‧레저용으로 정의한 모델항공기와 달리무인
기를
aerial work*용으로 정의하고 있으며, 구체적
으로 정의되어 있지는 않으나
, 기술적 도움을 기반
으로 한 비가시권 비행을 허용하고 있다
. 기술적
도움 없이 직접적인 육안범위 내에서 접근항공기
또는 장애물을 식별할 수 있는 경우 야간비행 가
능하다
.
야외 군중 상공 또는 인구밀집지역 상공에서 최
대이륙중량
7kg을 초과하지 않는 무인기는 비행이
허가된다
.
150m 비행고도제한은 고정 구조물(건물, 무선송
신탑 등
)에 대해 그 소유자의 요구에 의해 구조물
안전성 등을 검사하는 경우
, 무인기가 대상물로부
터의 측면거리
15m 이내에서 검사를 수행하는 경
우 적용되지 않는다
.
2.3 일본
일본은
2015년 소형 무인기 비행 관련 항목을
담은 항공법 개정을 통해 최초로 무인기 관련법을
제정하였다
. 규제 대상이 되는 무인기는 회전익과
고정익 모두 포함
(경량화 장난감은 규제대상 제외)
하고 있으며
, 공항 주변과 주택밀집지역은 비행금
지구역으로 지정
(안전성 확보, 당국 허가 시 비행
가능
)하였고, 야간비행이나 폭발물 수송, 행사/전
시회 등에서의 비행을 금지하고 있다
.
법 규정 제정과 아울러 자국 내 무인기의 상업
적 활용 도모를 위해 일본정부는 지바시
(千葉市)를
'소형무인기 국가전략특구'로 지정(‘15.12월)하고 규
제 완화를 통해 도심 내 물류시스템 구축 등 서비
스 상용화를 추진하고 있다
.
* Aerial Work(무인기 활용사업) :농업, 건설, 영상촬
영, 감시, 구조, 항공광고 등과 같은 규정된 업무를
위하여 항공기를 사용하는 항공업
2.4 중국
중국은
‘15년 12월에 ‘경소형무인기운행규정’[4]
을 통해 무인기 운항상태를 지속적으로 보고하는
U-Cloud 시스템 도입을 법제화 했으며, 인구밀집
지역 및 비가시권 지역에서의 비행도
U-Cloud 활
용을 통해 허용하는 제도를 도입하였다
. U-Cloud
은 현재 미국
NASA에서 연구하는 저고도 무인기
관제시스템
(UTM : UAV Traffic Management)의
초기형태로 향후 국가적 규모의
UTM 구축 시 실
용적인 데이터를 제공할 것으로 보인다
.
중국은 무인기 관련 조종자 자격을 일본과 같이
민간협회에서 관리하고 있으나
, 무인기의 국가 공
역 내 비행에 한해 중국 정부가 자격을 관리 할
예정이다
.
일본이 무인기를 이용한 도심 내 물류 배송시스
템 개발에 집중하고 있는 반면
, 중국은 도심 물류
센터에서 오지의 소비지로의 물류배송에 중점하고
있다
. ‘16.5월 중국 무인기 업체가 15kg 무게의 화
물을
80km 떨어진 목표지점까지 배달에 성공하였
으며
, 이를 기반으로 물류오지에 대한 시스템 구축
에 박차를 가하고 있다
.
2.5 기타
영국은 세계 최초
(2011년)로 민간 무인기 전용
비행시험장을 운용해 오고 있는 국가로
, 일정 자격
요건
(안전운항기술 확보)을 갖춘 회사의 경우에 한
해 비가시권비행과 야간비행을 허용하고 있다
. 영
국은 엄격한 요건 관리를 통해 상업적 비행
, 비가
시권 비행
, 야간비행까지 허용하고 있으며 관련 법
규정이 가장 잘 완비되어 있는 것으로 평가되고
있다
.
독일 또한 무인기의 상업적 활용을 지원하기 위
해 금년 하반기
25kg 이하 무인기의 비가시권 비
행을 허용하는 법 개정을 계획하고 있다
.
프랑스는 관제사의 협력을 통한 비가시권 비행
을 허용하고 있으나
, 영국과 달리 야간비행은 단호
하게 불허하고 있다
.

14
오경륜 외 / 항공우주산업기술동향 14/2 (2016) pp. 11~17
3. 상업 무인기 시대 대비 선결제도
상업 무인기 시대의 본격적인 도래에 앞서 선결
되어야 할 현안들이 산적해 있으며
, 이에 대한 해
결책들이 관련 규제로 제도화 되어야 한다
.
3.1 운용안전
국가 항공당국과 민간부문이 직면하게 될 가장
긴급한 도전은 레크리에이션 및 상업용 무인기 운
용의 보안감독을 확실히 하는 것이다
. 보안감독시
스템의 한 부분은 무인기 등록의 법적의무화로
,
이를 통해 당국은 법을 위반하는 무인기 조종자를
식별할 수 있게 되었으며
, 안전감독시스템의 또
다른 부분은 무인기가 비행물체와 충돌하는 것을
방지할 수 있는 복합 항공교통관리 시스템의 개발
이다
.
이러한 시스템은 무인기가 다른 항공기와 잠재
적인 장애물을 회피하게 할 수 있어야 하며
, 관제
사와의 통신을 가능하게 하여야 한다
.
추가적으로
, 시스템은 정보의 흐름을 위해 국가
유인기 항공교통관리시스템과 통합되어야 하며
, 더
욱이
, 무인기는 제어가 되지 않아 지상에 추락하는
것을 방지하기 위한 자동고장대처기능을 가져야
한다
.
이러한 해결방안들은
2020년 경 국제민간항공
기구
(ICAO)에서 무인기 표준권고안에 반영될 예
정이다
.
3.2 사생활 보호
무인기 운용자가 특정지역에서 비행을 수행할
때
, 운용자는 방대한 양의 데이터를 수집하게 되
고
, 때로는 개인자산 또는 개인행동과 관련한 비밀
정보나 민감한 정보를 포함한 데이터를 수집하게
된다
.
무인기 시장의 급속한 성장으로 무인기 운용과
관련한 사생활보호 법 제정 압박이 증가되고 있으
나
, 관련법을 준비하고 법안이 통과되기에는 시간
이 소요될 것이나
, 이동통신과 인터넷의 경우와 같
은 선 경험 사례가 있어
, 개인 사생활보호 이슈가
무인기의 추가 도입을 가로막는 주요 요인이 되지
는 않을 것으로 예상된다
.
3.3 보상보험
대부분의 국가에서 항공기 사용자들은 법률에
의해 항공기 사고에 대비한 책임보험에 가입하여
야 한다
. 무인기 운용 중 또는 운용 후의 사고에
따른 물리적 손실 위험 등을 보상하기 위해 보험
은 무인기 위험관리의 주요 요인의 하나가 될 것
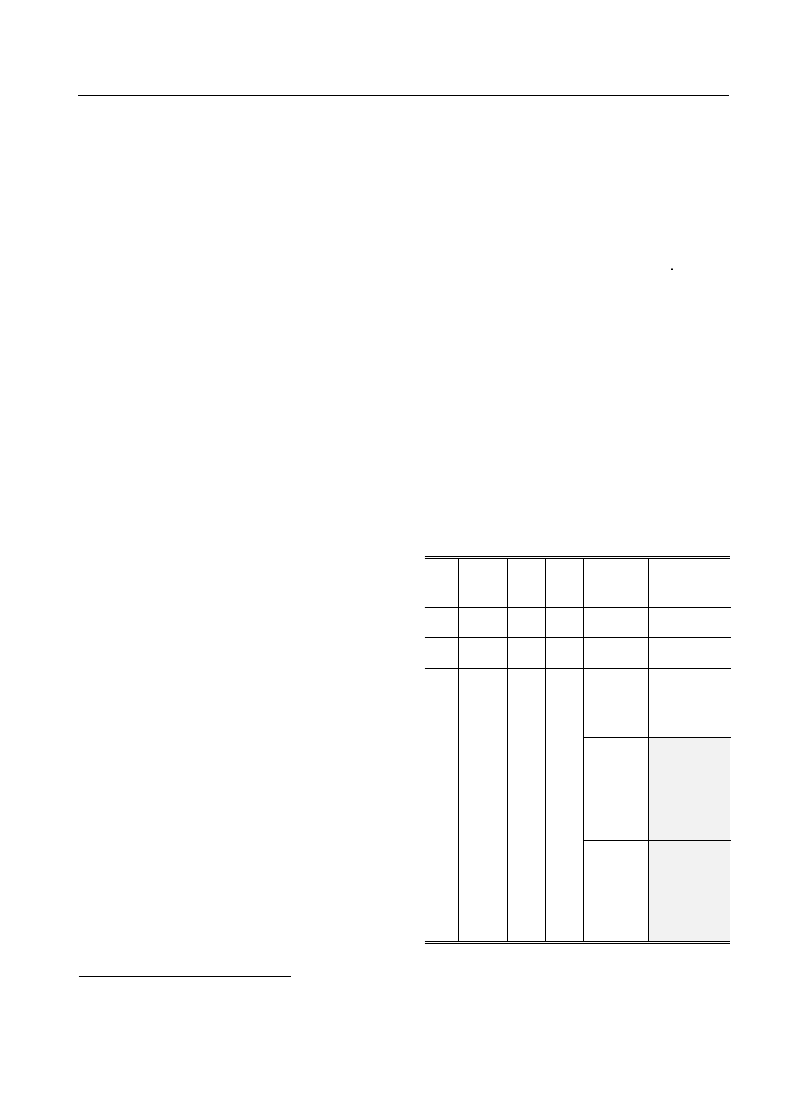
국가
상업비행
허용여부
비행면허
비가시권
비행허가
비가시권
비행면허
책임보험
가입의무
면허취득
필수교육
폴란드
✔
✔
✔
✔
✔
✔
영국
✔
✔
✔
✔
✔
✔
중국
✔
✔
✔
✗
✔
✔
캐나다
✔
✔
✔
✗
✔
✗
독일
✔
✔
✗
✗
✔
✔
프랑스
✔
✔
✔
✗
✗
✔
남아공
✔
✔
✔
✗
✗
✔
호주
✔
✔
✗
✗
✔
✔
브라질
✔
✔
✔
✗
✗
✗
미국
✔
✔
✗
✗
✗
✗
일본
✔
✗
✗
✗
✗
✗
러시아
✗
✗
✗
✗
✗
✔
표
1. 국가별 무인기 관련 주요 규정 내용 [5]
오경륜 외 / 항공우주산업기술동향 14/2 (2016) pp. 11~17
15
이며
, 물리적 손실은 무인기 자체뿐만 아니라 탑재
장비와 지상국을 포함하고
, 책임보험은 제3자의 부
상 또는 자산의 피해를 보상하기 위해 의무적으로
가입되어야 한다
. 국내 법에서는 무인기 사고에 따
른 보상 보험 가입을 의무화 하고 있지 않으나
, 폴
란드
, 영국, 중국, 캐나다, 독일, 호주 등에서는 무
인기의 책임보험가입을 의무화 하고 있다
.
4. 국내 법 개정 관련 제안
국내에서는 농작물 방제에 무인기 활용이 확대
되고 있는 상황이나
, 본격적인 무인기 상업화는 공
공분야에서의 무인기 활용을 통해 급속히 확대될
것으로 예상된다
.
국민안전 감시 및 대응 무인항공기 융합시스템
구축 및 운용 사례 연구에 따르면 소방
, 해경, 경
찰
, 산림청의 해당 공공업무 수행에 무인기 도입
시 잠재적 수요가
2,849대로 예측되었다. 국토부에
서 전국 공공기관을 대상으로 실시한 무인기 도입
계획에 대한 설문조사에서는
2018년까지 634대의
무인기 도입될 것으로 파악되었다
.
국내 공공기관의 무인기 활용 활성화를 위해서
는 공공업무 무인기 운용에서 조종자 준수사항 등
의 적용 예외를 인정하는 조항의 신설이 필요하다
.
일본의 경우
2015년 9월 재정 공표된 항공법 제
9장 무인항공기 규정의‘제132조의 3’규정에 일본
국토교통성령으로 정한 목적을 위한 수색 및 탐색
작업의 경우
, 인구 및 가옥 밀집 지역 상공에서의
비행 전면 금지
, 주간비행, 가시권 비행, 사람‧가옥
국가
분 류
등록/신고
운항허가
조종자 자격
BVLOS
비행
야간
비행
상업적
활용
미국
① <25kg,
② >25kg
① O
(250g이상)
② O
① X, ② O
①② O (2년)
불허
불허
제한적
허용
캐나다
① <2kg,
② 2-25kg,
③ >25kg,
④ >35kg
①②③④ O
① X
② 일부면제,
③④ O
①②③④ O
(신청 & 훈련)
① 18세이상
(학교 등에서
감독 하에
16세이상)
② 18세 이상
불허
불허
제한적
허용
영국
① <20kg,
② 20-150kg,
③ >150kg
① X,
②③ O
①②③ O
①②③ O
불허
(허가대상)
불허
(허가대상)
허용
프랑스
무게, 고도, 거리
①<25kg,<150m,<100m
②<25kg,<50m,<1km
③<4kg,<150m,<150m,
④<2kg,<150m,∞
①②③④ O
① X
②③④ O
①②③④ O
불허
(허가대상)
불허
허용
중국
① 0<T.W≤1.4kg,
② 1.5<T.W≤7kg,
③ 7<T.W≤25kg
④ 25<T.W≤150kg,
⑤ 농업용 무인기
⑥ 무인비행선
⑦ 비가시권 비행 ①,②
① X
②③④⑤⑥
⑦ O
① X
②③④⑤⑥⑦
O
①② X
③④⑤⑥⑦ O
(민간자격)
허용
불허
허용
일본
① <200g,
② <25kg,
③ >25kg
① X,
②③ O
① X
②③ O
① X, ②③ O
(민간자격)
불허
(허가대상)
불허
(허가대상)
허용
핀란드
①<7kg,
②<25kg
광의등록제
없음
없음
허용
조건부
허용
허용
한국
①<25kg
②25-150kg,
③>150kg
① X,
②③ O
① X
②③ O
① X, ②③ O
불허
불허
제한적
허용
표
2. 각국 무인기 관련 법.규제 현황
16
오경륜 외 / 항공우주산업기술동향 14/2 (2016) pp. 11~17
으로부터 이격비행
, 군중 상공 비행금지, 위험물질
수송금지
, 물체의 투하 금지 등의 규정을 적용하지
않는다고 명시하고 있다
.
산업분야
소요
소요 (대)
현재 ‘16년 ‘17년 ‘18년
합(구성비)
건설/교통
10
4
8
14
36 ( 5.7%)
측량/측지 등
5
2
5
2
14 ( 2.2%)
에너지
27
6
32
62
127 (20.0%)
농업
2
2
6
11
21 ( 3.3%)
촬영
2
1
2
1
6 ( 0.9%)
공공서비스
29
87
149
167
432 (67.9%)
75
102
202
257
636
표
3. 무인기 공공기관 산업별 소요
※ 산업별 구분 기준
1. 건설/교통
2. 측량/측지/GIS
3. 에너지
4. 농업(농림축산)
5. 촬영
6. 공공서비스(하천관리, 치안, 재난대응, 소방, 산림관리, 불법어업 감시 등)
임무별 소요
소요(대)
현재
‘16년 ‘17년 ‘18년
합 (구성비)
안전상태
모니터링
26
19
38
58
141 (22.2%)
상황
모니터링
48
57
107
112
324 (50.9%)
측정
1
12
50
70
133 (20.9%)
실시
-
-
-
-
-
물류
-
-
-
-
-
기타
-
14
7
17
38 ( 6.0%)
75
102
202
257
636
표
4. 무인기 공공기관 임무별 소요
※ 임무별 구분 기준 :
1. 안전상태 모니터링(건축물, 송유, 송전, 절개지, 플랜트 등)
2. 상황모니터링(건설현장, 사고현장, 재난현장, 작황상태, 감시(고정,
이동 포함), 보상 등의 증거자료 등 영상을 기본으로 하는 임무)
3. 측정(relay 포함)
4. 실시(파종, 시비, 산불진화 등)
5. 물류
6. 기타
국내 초기 상업 무인기 시장을 탄탄하게 형성할
공공분야
, 특히 응급재난구조활동에서 무인기 도입
을 활성화하기 위한 조종자 준수 사항의 예외 조
항의 신설이 필요하다
.
국내 공공기관의 무인기 활용 임무 중 구조물의
안전상태모니터링을 위한 소요가 약
22%를 차지하
고 있다
. 서울의 고층건물은 증가 추세로 최고 높
이는
555m에 이르고 있다. 현행법에서 무인기는
고도
150m 이하를 비행하도록 되어 있다. 무인기
를 이용한 고층 구조물의 안전진단을 위해서는 고
도제한의 예외 규정 신설이 필요하다
.
미국
, 핀란드 등에서는 높은 구조물(건물, 안테
나 등
)의 안전진단에 무인기를 활용하기 위해 구조
물 주변 일정 거리 내에서의 무인기 비행에는 고
도제한을 적용하지 않는 내용을 신규 규정에 반영
하고 있다
.
미국의 소형 무인기 관련 법안
(소형무인항공기
운항규제
: part 107 of the FAR[6])에서도 공장
굴뚝의 오염물질 감시나 고층건물과 전선 등의 안
정성이나 이상 유무 확인하는 등의 상업적 목적으
로의 무인기 활용 위해 고정 구조물 근처
400ft
내에서는 지상으로부터
400ft 이상 운용이 허용되
고 있다
.
핀란드는 무선송신탑과 같은 고정 장애물의 소
유자 요구에 의해 무인기를 이용하여 구조안전성
을 검사하는 경우
, 무인기가 대상물로부터의 측면
거리
15m 이내에서 검사를 수행하는 경우 고도제
한
(150m)을 적용하지 않고 있다.
국내 고층 건축물 및 높은 교량 등에 대한 구
조안전진단에 무인기 활용 도입을 위해서 고도제
한 등의 적용 예외를 규정하는 조항의 신설이 필
요하다
.
5. 결 론
이상과 같이 주요 국가들의 상업 무인기 시대
를 대비한 법 규정 개정 현황에 대해 살펴봤다
. 국
내에서는 그동안 무인기 규제에 대해 지속적인 개
선을 진행해 오고 있으나
, 무인비행장치 활용 신산
업분야 안전성 검증 시범사업의 결과를 체계적으
로 관련 법 규정에 반영하지 않고 있다
. 무인기 기

오경륜 외 / 항공우주산업기술동향 14/2 (2016) pp. 11~17
17
체에 대한 감항증명 관련
ICAO 표준권고안이 완
성되기 이전이라도 국내 상업적 무인기 활용을 활
성화하기 위해서는 시범사업을 통해 검증된 사항
들을 적극적으로 관련 규정에 반영하여야 하고
, 초
기 상업 무인기 시장을 확대하기 위해 공공분야에
서의 무인기 운용을 위한 예외 규정 신설의 적극
검토가 필요하다
.
후기
이 논문은
“산업현장핵심기술수시개발사업”중 한
국항공우주연구원에서 수행한
“글로벌 리더급 무인
항공기 개념설계 및 핵심기술개발
”과제에서 수행
된 연구 결과 중 일부임
.
참고문헌
1. https://youtu.be/DoA4ynYft1I
2. https//www.faa.gov/news/speeches/
news_story.cfm?newsId=20594
3. Trafi Finnish Transport Safety Agency,
Aviation Act(864/2014), Section 9, 57 and 70,
Use of Remotely Piloted Aircraft and Model
Aircraft, 9 Oct. 2015
4. http://www.caac.gov.cn/XXGK/XXGK/
GFXWJ/201601/t20160113_26519.html
5. pwc, “Clarity from above pwC global report
on the commercial applications of drone
technology”, May 2016, pp. 21
6. https:// www.faa.gov/uas/media/
AC_107-2_AFS-1_Signed.pdf

항공우주산업기술동향 14권 2호 (2016) pp. 18~27
http://library.kari.re.kr
에서 보실 수 있습니다.
산업·정책동향
지구관측 위성 프로그램 기획 전략
- 미국과 유럽 사례 중심 -
김은정*
1)
, 황진영**2)
U.S. and Europe Strategic Plans for Earth Observation
Eunjeong Kim,*, Chin Young Hwang**
ABSTRACT
This paper goes over U.S. and Europe’s earth observation strategies including planning and
assessment process. Their strategies are examined based on the National Strategy/Plan for Civil Earth
Observation for U.S. and Copernicus program for Europe. One of the important features of their strategies is that
they were developed in holistic frame including in-situ(e.g. airborne, terrestrial) platforms and data service
segment as well as space systems. Also, they specify agency roles for in-situ and space platforms or according to
observation categories. Since government satellite missions in Korea has been developed based on requirements
of individual government agencies, gathering requirements is necessary to be advanced into a highly structured
process. The returns of investment of the space-based earth observation can be enhanced through established in
holistic perspective and interconnected with other platforms.
초 록
본고에서는 미국과 유럽의 지구관측 위성 프로그램의 전략과 기획, 평가에 이르는 과정에 대해 살펴보
았다. 지구관측위성 프로그램은 위성뿐 아니라 항공관측과 지상관측을 포함하는 종합적인 프레임 속에서
기획되고 있으며, 국가별로 우주관측, 현지관측, 서비스나 관측 유형별로 책임기관을 지정하여 상호 협력
할 수 있는 체제를 구축함으로써 중복을 방지하고 국가 자원을 효율적으로 활용할 수 있도록 하고 있다.
우리나라는 아직까지는 지구관측 활용 수요부처의 소요제기를 반영하여 위성개발 계획을 수립하는 단
계에 있으나, 증가하는 지구관측 위성수요를 감안할 때 앞으로는 국가적인 차원에서 보다 심층적이고 종
합적인 관점에서, 수요를 분석하고, 타 지구관측 시스템과의 연계를 강화함으로써 중복을 방지하고 활용
성을 극대화 할 필요가 있다.
Key Words : Earth Observation Strategy, Copernicus, U.S. National Strategy for Civil EarthObservation
* 김은정, 한국항공우주연구원 미래전략본부 우주정책팀
eunjeong@kari.re.kr
** 황진영, 한국항공우주연구원 미래전략본부
cyhwang@kari.re.kr

김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
19
1. 서 론
우리 정부는
2013년 국가 ‘우주개발중장기계획’을
수립하면서 관측위성 개발의 폭을 넓혔다
. 공공안전
등 국가의 전략적 수요에 초점을 맞추어온 고해상도
다목적실용위성 개발과는 별도로
, 농업, 산림, 기상,
환경의 다양한 공공수요에 더욱 적극적으로 대응하기
위해 중
·저해상도 광역관측, 초분광기, 마이크로파 탐
측기 등 다양한 탑재체를 차세대중형위성이라는 프로
그램을 통해 개발하기로 하였다
.
그러나 정부에서 투자할 수 있는 예산의 한계로 인
하여 차세대중형위성 개발 우선순위를 정하는 것이
필수적이나 그 과정이 수월하지는 않다
. 2012년 교육
과학기술부는
‘국가 우주개발 미래비전’ 기획연구를
통해 정부부처
·연구기관을 대상으로 위성수요 의견
수렴하였는데
, 차세대중형위성이 지향하는 500kg급
위성으로 충족이 가능한 수요가
2040년까지 총 40기
가 되는 것으로 조사되었다
. 2015년 차세대중형위성
은
1단계 사업이 시작되어 광학관측용 1호가 개발 중
이며
2호도 착수될 예정이다. 후속 2단계 사업은 정부
의 다양한 공공수요 요구사항을 분석하고 수요 정부
부처와 개발 우선순위 협의과정을 거쳐 개발 로드맵
을 수립하는 기획 과정에 있다
.
2013년 수립된 국가 우주개발중장기계획은 2018년
경이면 새로운 환경변화를 반영하여 업데이트될 예정
이다
.1) 관측 수요가 점차 증가하면서 개발·활용을 둘
러싼 다양한 정부부처 및 이해관계자들의 의견을 효
율적으로 반영하는 것이 매우 중요한 시점이다
. 본 보
고서에서는
, 차세대중형위성을 포함한 향후 국가 지
구관측 위성 프로그램의 기획이 더욱 견고하게 추진
될 수 있도록 아이디어를 제공하고자 해외 우주기반
지구관측 시스템 기획 과정을 살펴본다
. 2001년에 착
수된 유럽의 전지구 지구관측 시스템
Copernicus 프
로그램은 다양한 관측시스템 개발과 활용을 통합적인
관점에서 추진하는 대표적인 지구관측 프로그램이다
.
미국 또한 최근
National Strategy for Civil Earth
Observation(2013년), National Plan for Civil Earth
1) 우주개발진흥법에 의해 5년마다 우주개발 중장기 정책목표 등을 반영
한 우주개발진흥 기본계획이 수립되어야 한다.
Observations(2014년)의 국가 지구관측 전략을 발표
하였다
. 미국은 지구관측시스템의 평가와 우선순위
설정 등에 있어 좋은 사례가 될 수 있다
. 유럽과 미국
모두 관측 수요들의 우선순위를 선정하는 문제
, 지구
관측 임무간 중복성 해결
, 정부부처간 협력강화의 필
요성 등을 동일하게 고민하고 있음을 알 수 있다
. 본문
의 각 소제목들은 우리나라 전략 기획에 포함될 필요
가 있다고 생각하는 항목으로 구성하였으며
, 각 장들
에 이에 적합한 유럽이나 미국의 사례를 담으려고 했
으나 내용이 충분하지 않은 경우 미국 또는 유럽 한 사
례만을 실었다
.
2. 유럽·미국의 지구관측시스템 전략 개요
2.1 전략의 착수배경
2.1.1 유럽의 Copernicus (구 GMES)2)
유럽의 전지구 환경
·안보 지구관측 프로그램인
Copernicus는 1998년 10월 Italy Baveno에서 개최된
EC(유럽공동체) 각료회의의 Baveno 선언(Manifesto)
에서 시작되었다
. 본 선언은 점차 증가하는 글로벌 환
경과 안보 모니터링의 중요성을 반영하여 통합적인
전략을 수립하고 유럽의 역할 강화를 모색해야 한다
는 의견이 결집된 중요한 순간이었다
. 이 시기는 세계
기후변화와 환경문제를 국제 공론화시키려는 정치적
의지들이 표출되기 시작하였으며 환경문제 해결을 위
해 과학기술 역량이 적극적으로 활용되어야 한다는
요구가 나타난 시기였다
. 기술적 측면에서 이미 유럽
은 지구관측 분야에서 선도적인 위치를 차지하고 있
었으나
, 유럽의 다양한 관측 시스템들을 포괄하는 통
합적이고 명확한 전략이 부재하였고
, 관측을 수행하
는 기관별
(국가, EU, EC, ESA, Eumesat 등) 활동 간에
조율이 부족하였다
[1].
Copernicus 이전 1970년대부터 Eumesat(유럽기상
위성기구
)의 Meteosat(기상위성), CNES(프랑스 우주
청
)의 Spot(고해상도 관측위성), ESA의 ERS-1(스캐터
로미터와 레이더고도계를 함께 탑재한
C-밴드 SAR
2) 유럽의 글로벌 지구관측 프로그램 GMES(Global Monitoring for
Environment and Security)은 2012년 Copernicus로 이름이 변경되었다.

20
김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
위성
) 등 다국적 기반의 관측 위성시스템이 운영되고
있었다
. EC는 이러한 위성 데이터들을 토대로 과학적
인 연구와 실질적인 활용 임무들을 수행해 왔다
. 유럽
공동농업정책
(Common Agricultural Policy) 이행을
위해 위성 정보만을 활용한 작황 통계 프로젝트인
MARS(Monitoring Agricultural ResourceS)를 성공
적으로 수행하기도 했다
. 이에 더 나아가 EC는 위성
정보의 활용가치가 매우 크다는 것을 인정하여
SPOT-4, SPOT-5에 탑재되는 식생 관측 센서에 투자
하기 시작하였다
. 그러나 아직까지는 정책 이행 과정
에서 정책 입안자와 위성 시스템 관련 연구 전문가 그
룹간의 긴밀한 협력이 충분히 이뤄지지 못했다
. 1997
년 기후변화 교토 의정서
(protocol) 채택 시점에도 EU
는 온실가스 감소 정책 이행에 필요한 모니터링 방법
에 한계가 있음을 느꼈으며 위성이 제공할 수 있는 기
후변화 측정치의 활용성을 연계시키지 못했다
[1]. 이
를 해결하기 위해
, 2001년 EU 국가 정상회의에서
Copernicus 프로그램이 공식 승인되었고, EU(유럽연
합
)와 ESA(유럽우주청)는 Copernicus 구축 전략 수
립과 이행을 위해 공동 노력을 추진하게 된다
[6].
2.1.2 미국의 지구관측시스템 전략과 계획
미국의 지구관측시스템 국가 전략과 계획
(National
Plan for Civil Earth Observation, National Strategy for
Civil Earth Observation)의 태동은 유럽 Copernicus와
차이가 있는데
, 정부 지구관측 시스템의 규모가 증가
하면서 관측 시스템간 협력체계 정비
, 선택과 집중 전
략의 도입 필요에서 시작되었다
. 미국 연방정부가 제
공하는 지구관측 데이터는 세계 최대 규모로서 매년
지구관측 임무에 지출되는 예산이 수십억 달러
(위성
시스템에만
25억 달러 이상, 항공/육상/해양 관측기
기에 약
10억 달러 이상)에 달하며, 지구관측 데이터
의 생산과 활용에 관련된 정부 프로그램이
100여개
(비연방정부 프로그램 포함)에 이른다[2]. 그러나, 관
련 기관간의 협조와 조율이 효율적으로 진행되지
못할 경우
, 데이터의 신뢰성 확보에 핵심인 장기간
지속적인 관측에 문제가 발생하게 되고 이는 결국
관측의 투자 대비 효과와 정책결정 지원역할에 큰
영향을 끼칠 수 있다
[3].
백악관 과학기술정책실
(OSTP)은 2010년, 의회의
전략수립 요구와 이를 명시한
NASA Authorization
Act of 2010의 Sec. 702를 근거로, 지구관측 임무 조율·
협력을 강화하는 전략과 계획 수립에 착수하게 된다
.
OSTP, NASA, NOAA(환경대기청), USGS(지질조사
국
)의 공동주관 하에 국가 지구관측 Task Force팀
(National Task Force on Earth Observations)이 구성
되었고
, 국가과학기술위원회 소속 환경자연자원지속
가능성위원회
(Committee on Environment Natural
Resources and Sustainability) 소속 정부부처와 대통
령실의 상위부서장들이 전략수립에 참여하였다
.
OSTP는 다양한 연방정부 기관들과의 의견 수렴 과정
을 거쳐
2013년 National Strategy for Civil Earth
Observations(이하 National Strategy), 2014년에
National Plan for Civil Earth Observations(이하
National Plan)를 발표하였다.
2.2 전략의 논의범위
유럽
Copernicus 프로그램은 우주기반 관측, 즉 위
성 관측이 큰 비중을 차지하고 있으나
, 기본적인 프레
임은 우주관측
, 현지관측(in-situ observation, 항공 및
지상 관측 등
), 데이터통합·정보관리, 서비스의 4개의
요소로 구성되어 있다
[4]. Copernicus는 기본적인 관
측 프레임을
2008년까지 구축하는 것을 목표로 하고
있는데
, 주목해야할 부분은 관측 프레임 안에 기술적
역량
, 즉 위성 등 기술 뿐 아니라 제도적 장치와 정치
적인 지원 역량을 포함한다는 것이다
. 즉, 지구관측 시
스템의 개발
, 운영, 활용 주체가 다양하기 때문에 관련
이슈들을 해결하기 위한 거버넌스와 재정
, 운영에 관
한 제도
·정책을 논의 대상에 포함시키고 있다.
Copernicus는 관측 데이터의 생산 뿐 아니라 데이터
가 사용되는 예측 모델에도 투자하여 활용 가치를 높
이는 등 지구관측 역량을 높이기 위한 종합적인
(holistic) 관점을 취하고 있으며, 유럽 지구관측 시스
템의 한계를 보완할 수 있도록 비유럽 국가에서 생성
되는 데이터도 함께 활용하고 있다
[5].
미국의 경우에도
, 국가 지구관측시스템 전략의 지
구관측 플랫폼은 우주
, 항공, 지상, 해양, 육상의 모든

김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
21
관측 시스템을 포괄하고 있어 대상 범위가
Copernicus와 유사하다 [3]. 또한, Copernicus 프로그
램에서 시스템 개발 뿐 아니라 거버넌스와 제도를 포
괄적으로 다루듯이
, 미국 또한 시스템 개발·운영 거버
넌스 문제를 해결하고자
, 관측 위성 유형에 따라 정부
기관들이 역할을 명확히 하고 있다
. 이 외에, National
Strategy에서는 시스템 개발 뿐 아니라 데이터 관리와
배포 원칙과 가이드라인을 제시하고 있으며
,
National Plan을 세우기 위한 사전평가방법과 계획수
립 절차
, 원칙을 명시하고 있다.
3. 전략 세부내용
3.1 목적
지구관측 시스템에 대한 국가 전략의 철학과 방향
은 전략을 기반으로 수립되는 계획과 이행에 중요한
기준을 제시해준다
. Copernicus는 유럽의 지구관측
시스템이 부응해야 하는 두 가지 정책적 요구사항을
제시하고 있다
. 첫 번째는 유럽 국가의 환경과 안보에
관한 정책적 이슈를 해결하기 위해 정보에 대한 정책
입안자의 독립적 접근권한을 확보하는 것이며
, 두 번
째는 글로벌 지구관측시스템인
GEOSS(Global Earth
Observation System of Systems)에 기여하는 것이다 [5].
미국의
National Strategy의 목적은 지구관측 시스
템의 투자대비 효과를 극대화하기 위해 위성정보의
활용을 넓혀 혁신적인 분야에 까지 사용되도록 하고
,
지구관측의 경제적
·환경적 중요성을 감안하여 투자·
개발
·운용의 장기적인 지속성을 확보하는 것이다. 그
동안 정부기관들은 기관별 수요에 대응하는 관측 시
스템을 개별적으로 개발
·운영해왔기 때문에 투자의
효과와 관측 역량을 높이는 한계가 있었고
, 이번
National Strategy와 National Plan은 조율과 협력을
강화하는 체계를 제시한다
.
3.2 평가 (Earth Observation Assessment)
미국의
National Plan 수립 과정을 살펴보면, 계획
수립 이전에
EOA(Earth Observation Assessment)라
는 기존 관측시스템에 대한 평가가 이루어진다
. 2014
년에 발표된
National Plan 수립 시에도 2년
(2011~2012)에 걸쳐 현재 운용 중 또는 근미래의 계획
된 관측시스템에 대한
EOA가 진행되었다. 현재 시스
템에 대한 다각적인 평가는 향후 계획을 수립하는데
매우 중요하다
. 주요 평가내용은 관측 데이터가 활용
되는
13개 분야(Social Benefit Areas: 이하 SBA)를 식
별한 후 각 분야에 대한 관측 시스템들의 기여도 등을
평가하는 것이다
. EOA는 분야별 평가팀(assessment
team)을 중심으로 300 여명의 전문가들과 협력하여
진행되었다
. 평가실무팀(assessment working group)
은 평가를 위한 주요지침을 각 분과에 제공하고 지침
의 이행상황을 검토하였는데
, 각 분야별 팀들이 동일
한 평가 기준을 적용하였는지
, 유사한 수준으로 세부
적인 부분까지 평가 하였는지 등 팀별 평가과정을 검
토한다
. 평가 내용과 절차는 다음과 같다.
<평가 내용>
- 13개 분야에 대한 관측 시스템의 영향도(impact)
- 타 관측 시스템(군수/민수용, 국제적, 상업적 시
스템 포함
)을 보완하는 정도
- 기술·자원·인력 준비상황(readiness)에 관한 위험도
- 위험 감소 및 전략적 중복(중요 시스템 백업)
<평가 절차>
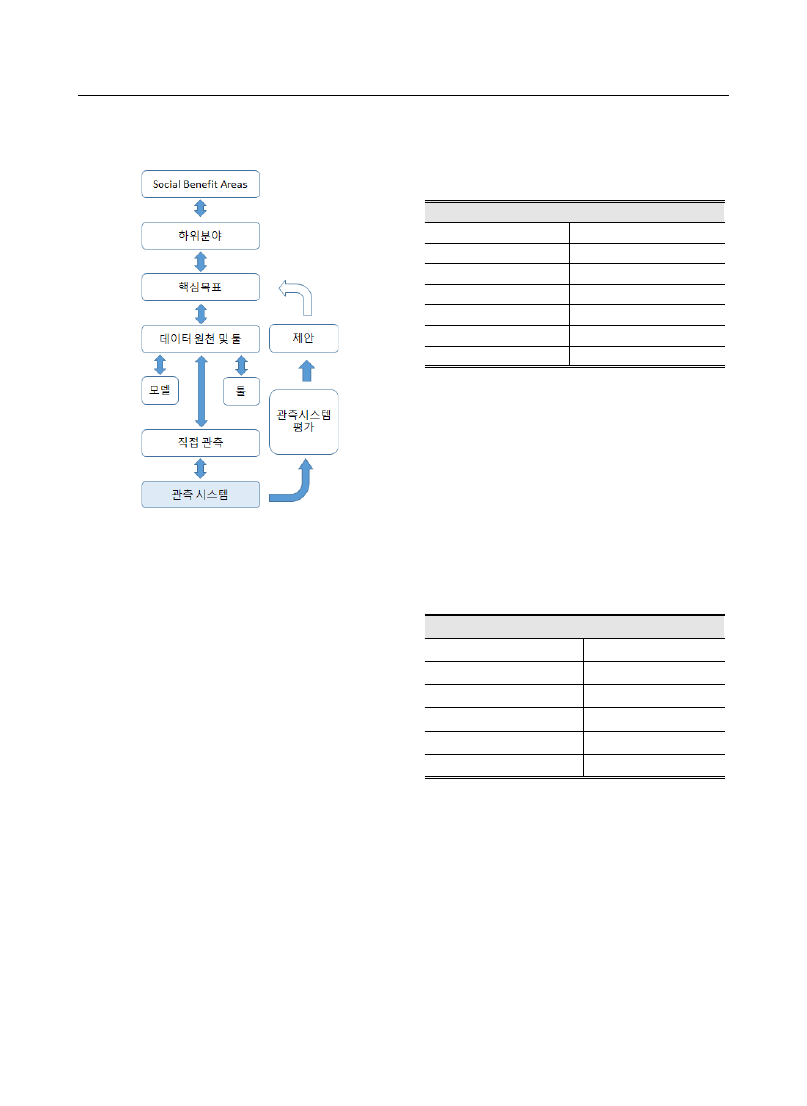
1. (SBA의 세부분야) 각 분야의 주요 하위분야 식별
2. (분야별 핵심목표) 관측에 관련된 목표 파악
3. (현재 관측시스템 현황) 목표 이행에 필요한 데이
터 소스와 툴
(분석 모델, 가공된 정보) 파악. value
chain 분석(그림 1 참조)을 통해 모델에 입력되는
데이터 추적 및 데이터를 생산하는 모든 지구관측
시스템 파악
. 3단계 목표는 현재 기여하고 있는 지
구관측 시스템 리스트를 도출하는 것임
4. (평가) Assessment Working Group의 가이드에
따라
3단계에서 도출된 현재 관측시스템의 영향
도
·성능 평가. 4단계 목표는 관측시스템들의 영
향도 순위를 도출하는 것임
5. (제안) 지속적 관측의 필요성, 위험요소 및 관측
gap 감소 해결책, 새로운 투자 기회, 효과적인 대
22
김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
안
, 장기적인 data-set 개발 필요성 등 도출
그림
1. 관측시스템 도출을 위한 value chain 분석 및
평가 절차
[3]
3.3 지구관측 분야의 분류
미국은 관측 시스템을 평가할 때 관측 데이터가 활
용되는
13개의 사회기여분야(societal benefit areas:
SBA)를 기준으로 삼았다. 이 분야들은 미연방정부에
서 추진하는 지속가능성 정책 목표와 글로벌 지구관
측 협의체인
Group on Earth Observation(GEO)이 제
시하는 관측분야에 연계되어 있다
. 데이터들은 각 분
야의 과학연구
, 정책, 의사결정 과정에 정보로 제공되
고
, 분야간 데이터 공동 사용이 가능하다. 미국
National Strategy에서는 13개 분야에 대한 자세한 설
명과 핵심적인 관측 요구사항 도출을 위한 이슈를 수
록하였다
. 예를 들어 농업·산림 분야에서 제시된 이슈
는 다음과 같다
: 국내 소규모 경지부터 세계 단위까지
식량 생산량
·수확량을 매년 어떻게 효과적이고 지속
적으로 모니터링 할 수 있는지
, 해충, 물·영양 상태 등
의 작황 상태에 대한 피드백과 조기경보를 제공하는
시스템을 구축할 수 있는지 등이다
. 미국 National
Strategy에서 정의한 지구관측 분야는 아래와 같다.
13대 지구관측 분야
농업·산림
건강
생물 다양성
해양·연안 자원과 상태
기후
우주 기상
재난
교통
생태
물
에너지·광물 자원
기상
참조 측정(지형도 등)
표
1. 미국의 관측분야 분류 [3]
유럽
Copernicus는 초기 서비스 제공 분야를 <표
2>와 같은 11개 분야로 선정하였다. 이 분야는 데이터
공급과 서비스가 시급한 분야로서
EU의 정책적 우선
순위를 반영하여 선정되었다
. 특히, 이 가운데 재난관
리
, 육상 모니터링, 해양 모니터링의 세 분야는 2008년
까지 정보 서비스가 제공되어야 하는 분야로 확정하
여
pilot service를 먼저 추진하였다.
11대 지구관측 분야
해양/연안 환경 관측
산림 관측
위험 관리 (홍수, 산림화재)
식량안보
위험 관리 (침강, 산사태)
글로벌 변화 관측
대기오염 관측
해양 안보
수질상태 관측
인도주의적 원조
토지사용, 토지피복 상태
표
2. 유럽의 관측분야 분류 [5]
3.4 우선순위 선정
미국
National Plan for Civil Earth Observations은
지구관측 임무 포트폴리오의 우선순위를 정하기 위한
목적으로
, 지구관측 임무를 장기간(7년 이상) 연속성
이 필요한 지속적 관측
(sustained observation)과 단
기적으로
(7년 미만)
수행되는 실험적 관측
(experimental observation)으로 분류하였다. 지속적
관측은 공공서비스와 공공서비스 지원에 관련된 연구
김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
23
목적으로 수행되며
, 실험적 관측은 기초응용 연구를
통한 지식의 확장 및 기술 혁신
, 공공서비스 개선에 기
여되는 실험적 임무에 활용된다
.
지속적 관측은 다시 공공서비스 관측과 공공서비
스 지원에 관련된 연구목적 관측으로 구분된다
.
공공서비스 목적은 생명과 재산 보호
(기상 재난, 계
절별
·연도별 기후변화, 지진과 홍수, 화재 감시, 대기
질 경보
), 상황 분석(교통, 농업, 에너지, 기상), 자원·
환경 관리
(자원 보유량 측정, 수질, 산림 모니터링)에
관련된 정보를 생산하는 것이다
. 관측 시스템들은 생
명
·재산 보호를 통해 사회·경제에 기여하며, 교통·에
너지
·자원 관리를 통해 경제적 활동 지원 및 공공 안
전을 확보한다
. 또한, 정확한 기록, 조사, 예측을 통해
과학적
, 경제적 목적에 기여한다.
공공서비스 목적의 지속적 관측은 관측임무의 중
요도에 따라
Tier 1과 Tier 2로 구분하였다. 관측치가
다수의 사회분야
, 즉 앞서 언급한 미국의 13개 사회기
여분야
(SBA) 가운데 다수 분야에서 활용될 경우 그
관측임무는 중요도가 높다고 판단하여
Tier 1로 구분
하였다
. 관측치의 중요도를 기준으로 나눈 Tier 1, 2 세
부내용은 아래
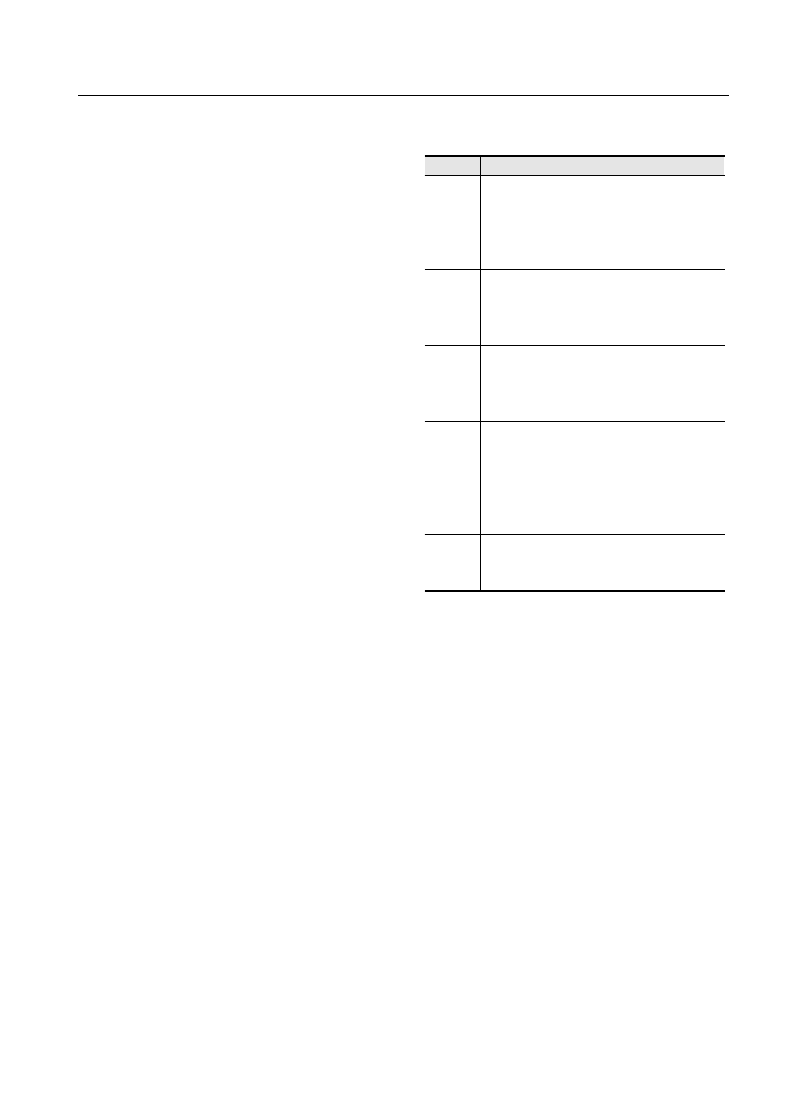
<표 3>과 같다.
활용도가 높은 관측임무
Tier 1
기상·기후 모니터링 및 예측
토지피복 모니터링 및 특성 파악
고도와 위치정보(geo-location)
수면 높이 및 흐름
Tier 2
생테계 및 생물다양성 자원 조사
환경 질(quality) 모니터링
지질 재난 모니터링
우주 기상 모니터링
표
3. 공공서비스 목적 지속적 관측의 세부분류
(중요도 기준) [2]
연구용 목적의 지속적 관측은 다년에 걸쳐 데이터
수집이 필요한 장기적인 연구에 활용된다
. 관측 정보
는 기후 변화 등 지구시스템 변화에 대한 이해를 높이
며
, 확장된 지식을 기반으로 공공 서비스를 개선하거
나 교육 정보로 활용된다
. 이러한 용도의 관측 분야로
는 대기
, 빙설권, 생태에너지 수지(energy budget), 극
단적 기상상태
(기온, 가뭄, 강수 등), 지질지각 위험,
온실가스방출
·집중정도, 지구물리-생태계 상호작용,
해양
, 우주기상, 수자원 사이클 관측이 해당된다. 지속
적 임무로 분류된 관측 프로그램들은 기관의 고유임
무로 수행되어 예산의 지속적 담보가 가능하다
.
마지막 실험적 관측은 단기적인 연구개발 목적으
로 수행하는 관측이다
. 주요 목적으로는 관측정보를
이용한 기초응용 연구 및 지식의 축적
, 기술혁신 도모,
공공서비스의 개선을 위한 실험적 연구가 있다
. 최초
의 관측
, 기술융합 등의 새로운 관측방법 적용(개념검
증
, 소형위성, UAV(unmanned aerial vehicle), 자동
화 및 센서 네트워크화 등 새로운 관측플랫폼
)의 임무
들이 이에 해당된다
. 새로운 플랫폼의 발전은 지구관
측의 효율성
, 정확성, 경제성을 더욱 높이는데 기여하
는 한편
, 이러한 새로운 기술과의 융합은 새로운 센서,
재료
, 기술에 대한 투자를 요구한다.
미국
National Plan은 관측 시스템 포트폴리오 구
성을 위해 지속적 및 실험적 관측에 대해 우선순위를
아래와 같이 정하였다
.
<관측 시스템 우선순위>
① 공공서비스 목적의 지속적 관측
② 연구 목적의 지속적 관측
③ 실험적 관측
④ 지속적 관측 네트워크의 개선
⑤ 엄격한 평가
, 우선순위 선정 프로세스의 지속적
운영 및 업데이트
2015년 대통령 예산안에서는, 우선순위가 높은 ‘①
공공서비스용 지속적 관측
’에 관련하여, 다음의 분야
를 지원하도록 하고 있다
(National Plan은 2014년에
발표되어
FY 2015년 대통령 예산안에 가이드로 반
영되었다
). (1) 대기상태 관측(기상·위험·대기질 예보,
물류 이동
, 기후연구 및 인프라계획), (2) 지표관측(42
년간 지속해온 다분광 관측과
36년간 열적외선 토지
표면 관측
), (3) 농작물 모니터링 및 산림자원 및 토지
관측
, (4) GPS 위성 네트워크 지속적 운용 및 관련된

24
김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
참조용
측정
(terrestrial
reference-frame
measurements), (5) 지형 모델링과 체적분석을 위한
고해상도
3차원 데이터의 정기적인 수집(항공신호검
출과 측량
(Airborne light detection and ranging:
LIDAR))
미 환경보호국
(EPA), 교통부(DOT), 농무부
(USDA) 등 미국의 많은 정부기관들은 지구 환경에 대
한 다양한 정보 수집을 위해 항공
, 지상, 해상 관측 플
랫폼을 함께 운영하고 있다
. 이러한 관측 시스템들은
고 해상도와 효율성을 보이며 연방정부가 공공서비스
의무를 수행하는데 매우 중요한 역할을 하고 있고
, 이
에 더 나아가 위성정보의 검증에도 기여한다
. 미국
National Plan은 정부에서 운용하는 비우주 관측 플랫
폼을 제시하고 있는데
, 앞서 언급한 카테고리를 동일
하게 적용하여 지속적인 관측
(공공서비스 및 연구에
활용
)과 실험적 관측으로 구분하고 있다.
3.5 신규 우주 관측시스템의 임무정의
3.5.1 신규 수요 파악
유럽
Copernicus 프로그램에서 우주기반관측부문
(Space Component)의 핵심은 Sentinel 위성 시리즈이
다
. Copernicus 운영위원회는 다양한 절차를 거쳐
Sentinel 위성의 임무를 정의하였다. 우선, 관측 부문
에서 우선순위가 높은
EU 정책들을 검토하고, EU,
EC, ESA 멤버 국가들의 위성정보 수요자들을 파악하
였다
. 그 다음, 정책 이행과 수요를 충족하기 위해 현
재 운용 중인 관측 시스템기반의
Copernicus 서비스
를 제공한다
. 초기 Copernicus 서비스 과정은 서비스
제공이라는 자체적인 목표에도 부합하지만 향후 필요
한 서비스와 새로운 우주 관측시스템에 대한 요구사
항을 파악할 수 있는 기회를 제공한다
. 또한, Sentinel
임무정의를 위해
, ESA, EU, Eumesat 및 국가별로 현
재 운용 중이거나 개발 계획이 확정된 위성을 분석하
여 유럽 정책에 필수적인 데이터와 향후 데이터 공급
에 공백이 발생할 수 있는 부분을 파악한다
. 2005년
Sentinel 위성의 임무 수립 당시, 유럽의 ERS-2(수심측
량
, 오존 모니터링 등)와 Spot-4(광학 관측) 위성이 이
미 임무수명을 지나 운영되고 있었고
, 그 당시 기준으
로 최근에 발사된
Envisat(대기 및 오존 모니터링, 해
양지형 관측 등
)과 Spot-5은 2007년에 임무수명을 마
칠 예정이었다
. 이와 유사한 기능을 수행하는 미국의
Landsat-7 위성은 유럽 국가들이 많이 활용하는 위성
인데
, 2003년 일부 부품(Scan Line Corrector)의 고장
으로 운용에 어려움을 겪고 있는 상태였다
. 이러한 상
황을 종합적으로 고려하여 새로 개발할 관측 시스템
의 임무로 관측의 연속성에 문제가 발생하는 분야를
선정하였다
.
관측 수요자들의 의견과 요구사항을 수집하는 과
정에는 매우 체계적으로 구조화된 프로세스가 적용되
었다
. 관측에 관련된 유럽정책 이행에 법적 책임을 갖
고 있는 정부기관들의 임무를 분석하고 기관들의 업
무
, 표준, 임무 이행에 필요한 관측 요구사항들을 평가
하였다
.
수요자 그룹은 원격탐사 기술경험이 많은 전문가부
터 관측 데이터를 처음 다루어보는 그룹까지 다양하
다
. 경험이 많은 전문가들은 주로 환경 관련 기관들에
속해있으며
, 이 기관들은 일찍부터 위성영상을 정책
이행에 활용하고 있으며
, 따라서 기관의 임무를 위해
어떤 성능의 관측 센서가 필요한지 제시할 수 있다
. 그
러나
, 이러한 기술 경험이 풍부한 수요자 외에, 환경,
대국민 안전
, 해안 경비, 지질 조사, 어업 관리, 교통 관
리를 담당하는 기관들이 잠재적 수요자들이 될 수 있
다
. 잠재적 수요자 파악을 위해 Copernicus 운영단은
초기
Copernicus 서비스 프로젝트에 참여한 330여 개
의 수요기관을 분석하여 소통의 기회를 마련하였다
.
3.5.2 임무정의
Copernicus의 Space Component는 위성과 위성운
용 관련 지상시스템으로 구성된다
. 위성으로는 유럽
국가들이 개별적으로 운영하는 위성
, 유럽기상위성기
구
(Eumesat)의 기상 위성, Third Party라고 분류된
Copernicus를 지원하는 해외 위성들을 포함하며,
Copernicus의 핵심적인 위성으로서 이러한 기존의 위
성이 채우지 못하는 임무를 위해 새로 개발되는
Sentinel 위성 시리즈로 구성된다.
Sentinel 위성 시리즈의 임무정의는 다른 위성 임무
정의방식과 차별성을 보인다
. Sentinel 시리즈는
김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
25
Sentinel-1 부터 Sentinel-6으로 구분되어 있으며 이들
은 관측의 주요 분야들
(유럽 11대 관측분야)에 대응할
수 있는 모든 임무를 포괄하고 있다
. Sentinel 다음에
붙어있는 숫자는 개발 순서와는 상관이 없으며
, 각각
의 위성은 하나의 위성 시스템에 탑재되기 어려운 상
호 배타적인 임무로 구성되어 있다
. 또한, 각 시리즈는
A, B의 2대 위성군으로 운용되어 단일 위성으로는 확
보하기 어려운 관측의 효과를 높이도록 하고 있다
.
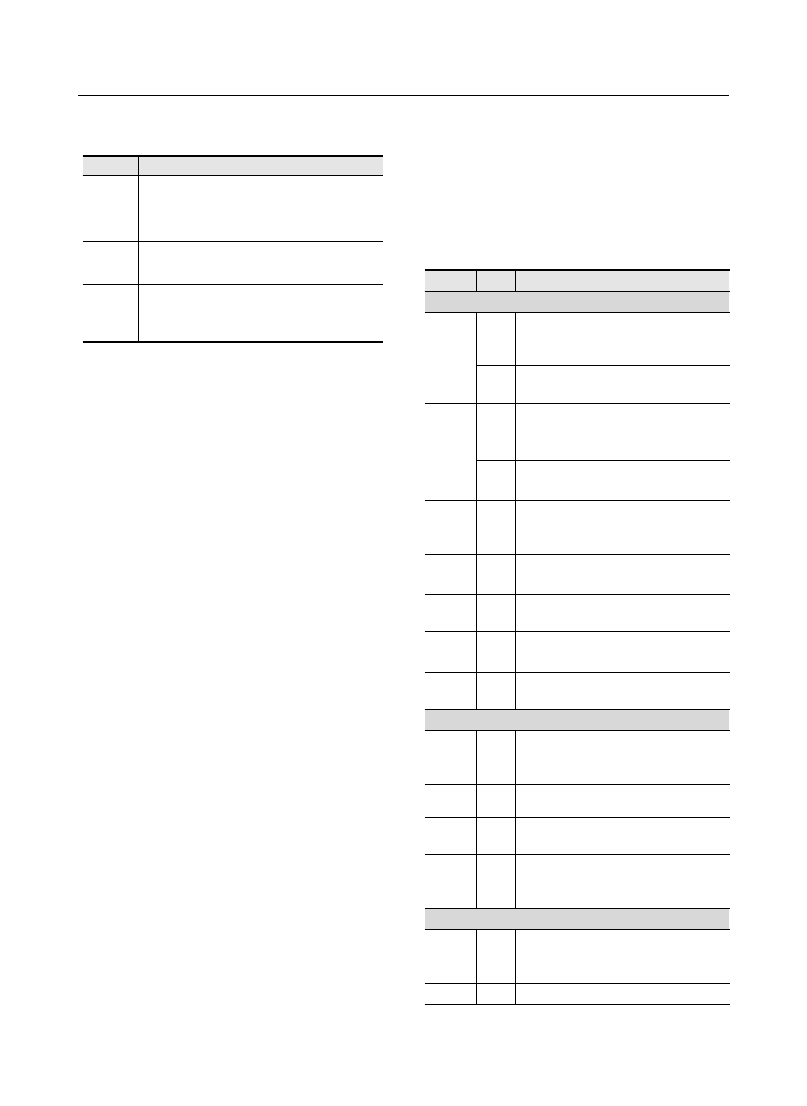
Sentinel 임무는 <표4>에 상세히 제시되어 있다.
<Sentinel 임무 정의>
Sentinel-1 : 간섭측정(interferometric) 레이더
Sentinel-2 : 다중분광 광학촬영
Sentinel-3 : 고도계와 중저 해상도 기반의 해양관측
Sentinel-4 : 정지궤도 대기성분 관측
Sentinel-5 : 저궤도 대기성분 관측
Sentinel-6 : 고도 측정
Sentinel 첫 번째 위성을 개발하는 Copernicus-1 단
계에서는 정책적 수요가 크면서 데이터 공백이 큰 분
문에 대응하기 위해
Sentinel 1과 3을 개발하기로 하였
다
. 2010년~2011년 사이에 첫 번째 위성을 발사하기
로 정하였다
. 11개 관측 분야 가운데 시급성이 높은 분
야는 재난관리
, 육상 관측, 해양 관측이다. 이 세 분야
는
2010~2011년 사이에 관측 데이터의 공백이 발생
할 수 있으며
EC에서도 개발 예산이 확보되지 못한
분야이다
. 개발 이전에 2008년까지 기존 관측 시스템
을 이용한
pilot service를 실시하여 Sentinel 1과 3의
임무 요구사항을 도출하는 기회로 삼았다
.
Copernicus-1은 기존 유럽 위성, MERIS 위성의 관측
의 연속성을 확보하기 위한 해색 관측기기
, ERS 위성
과
Envisat 위성의 간섭(interferometric) 및 해양/빙
하
/지표 관측의 연속성을 확보할 수 있는 C-밴드 레
이다를 개발하는 것으로 결정되어
Sentinel 1과 3이 선
정되었다
. 이외에 화재 모니터링용 적외선 관측기기
는 기술검증용으로 함께 탑재하기로 하였다
.
부문
세부내용
Sentinel
1
C-밴드 InSAR(interferometric SAR)
- (활용) 해빙 및 극지방 관측, 해양환경 감
시, 지각운동 관측 및 원조지원용 지도제작
- (제원) 고도 ~700km 태양동기궤도, 관측주
기 12일, 관측폭 ~250km, 해상도 5m*20m
Sentinel
2
다중분광 광학촬영
- (활용) 식생, 토지, 수자원 분포 등 지표변화
- (제원) 고도 800km, 관측주기 7일, 관측폭
285km, 9개 VNIR 밴드, 3개 SWIR 밴드
Sentinel
3
해양 관측기기 (해양지표 컬러 관측, 해양지
표 온도 관측, SAR 레이더 고도계)
- (활용) 장기간에 걸친 정기적인 해양 관측(해
색, 해표온도, 해양 지형도) 및 지표관측
Sentinel
4, 5
대기성분 관측 (Ultraviolet-Visible-Near-Infrared
분광계(4호), UA-VIS-NIR 및 단파장 적외선
분광계(5호))
- (활용) 대기의 화학성분 분석
- 정지궤도 운용(4호), 저궤도 운용(5호)
(각 MTG-S와 MetOp 위성에 탑재 예정)
Sentinel
6
해양 관측기기 (레이더 고도계)
- (활용) 해양고도 관측을 통한 기후변화 측정에 기여
- Jason-CS를 Sentinel 6로 활용
표
4. Sentinel 위성 세부 임무내용 [6]
3.6 거버넌스
유럽의
Copernicus 프로그램은 시스템들의 개발·
운용 담당기관을 세부적으로 지정하고 있지는 않지만
우주관측
, 현지관측(항공 관측 등), 서비스 3가지의 큰
축을 담당하는 기관을 정하였다
. 또한, 유럽 국가들의
다양한 관측 시스템간 중복을 최소화하고 협력을 이
끌어내기 위해 국가들이 개별적으로 개발
·운용하는
위성들간의 조율을 강화하는 기구나 협의체를 구성하
였다
.
아래
<표1>에서도 보듯이, ESA, EEA(유럽환경청),
EC(유럽공동체)는 Copernicus 프로그램의 우주관측,
현지관측
(in-situ observation), 서비스 부문을 담당하
고 있다
.
26
김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
부문
기관 및 담당임무
우주
관측
ESA (European Space Agency)
- Sentinel 위성
- 타 위성 시스템
(EU/ESA, Eumesat, 상업 위성, 해외 위성)
현지
관측
EEA (European Environment Agency)
- 위성 외의 항공, 현장측정 등 관측 시스템
서비스
EC (European Commission)
- 유럽 환경안보 정책 대응 정보 서비스
- 우주 및 현지 관측 데이터 활용
표
5. 유럽 Copernicus 부문별 책임기관 [6]
유럽 국가들이 각자 운용 중인 지상시스템과 데이
터 관리 간에 협력을 이끌어내는
‘Ground Segment
Coordination Body‘가 2005년에 설립되었다. 이 기구
에는 유럽의 우주청들이 참여하고 있으며
, 기구 협의
의 대상 시스템에는
Copernicus에 기여하는 모든 유
럽 국가
·기구들의 운용·계획 중인 시스템들이 포함된
다
. 2006년에는 EC의 기업부(Directorate-General for
Enterprise and Industry) 내에 Copernicus Bureau가
새로 설치되었는데
, 이 사무국은 EC 전 분야에 걸쳐
관측 수요를 조사 및 개발하고
Copernicus 프로그램
을 일반 대중에게 까지 알리는 일을 담당한다
. 또한,
2010년에는 Copernicus 조율과 협력을 담당하는 EC
의 업무를 더욱 강화하기 위해
EC내에 Copernicus
Partners Board가 설치되었다. Board는 Copernicus
프로그램에 대한 외부요구와 질문에 대응하기 위해
EC 멤버 국가들과 의견을 조율하고, 일관된 프레임을
따라
Copernicus 프로그램이 잘 진행되는지 모니터링
하며
, 프로그램의 전략 프레임 자체를 마련하는 것을
지원한다
.
미국의
National Policy에서는 위성 관측임무에 관
련된 기관간의 임무를 명확히 규정하고 있다
. 관측에
있어 기관간 임무의 중복성 문제가 그 동안 지속적으
로 제기되어왔으며
, 이번 National Policy를 통해 불명
확성을 해결하고자 노력하였다
. 본 보고서의 ‘3.4 관측
우선순위 선정
’에서 상세히 다루었듯이, 미국의 관측
임무는 임무기간
(지속적 또는 단기적)과 목적(운용성
또는 연구성
)에 따라 크게 3개의 카테고리로 구분하
고 있다
. 첫 번째는 공공서비스 목적의 지속적 관측,
두 번째는 연구 목적의 지속적 관측
, 세 번째는 단기적
연구개발 목적의 실험적 관측이다
. 기관별 임무도 이
분류에 따라 구분하였으며 세부적인 내용은 아래
<표
6>와 같다.
부문
기관
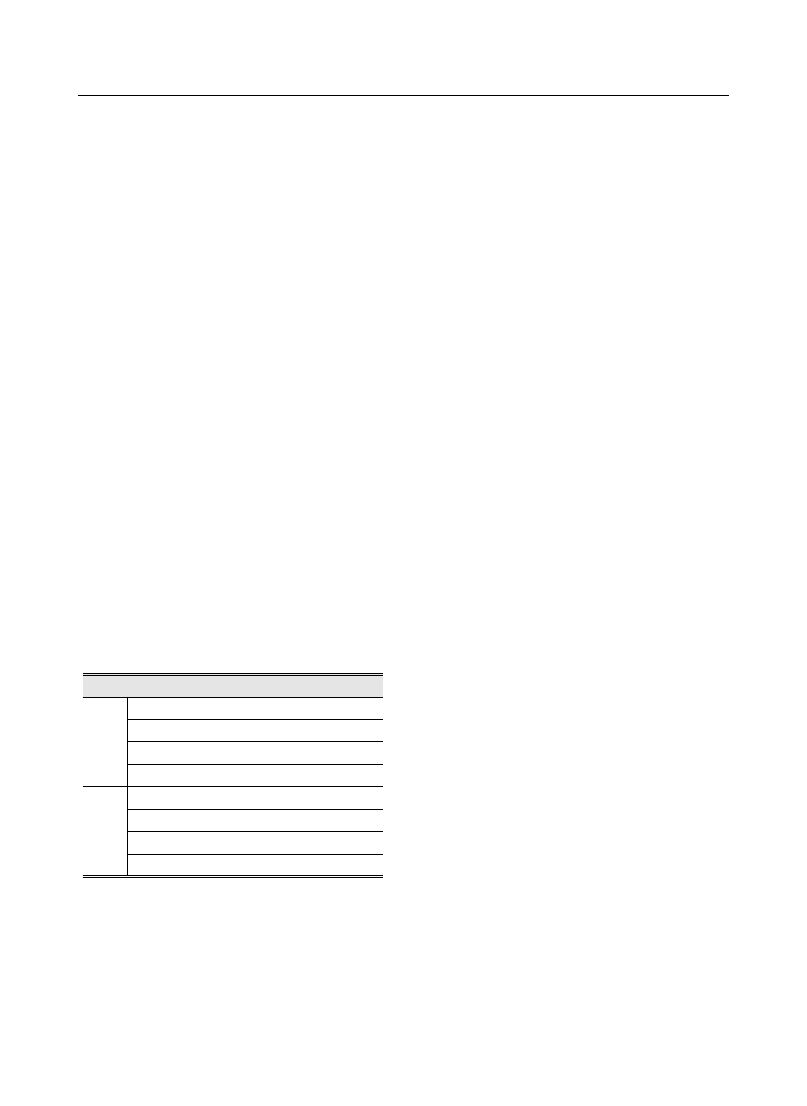
담당 임무
1) 공공서비스 목적의 지속적 관측
대기질
및
오존
NOAA
에어로졸, trace gas, 기상 데이터 공급
및 오존층을 측정하는 JPSS, S-NPP,
GOES 위성 운용 및 서비스
NASA
S-NPP의 오존층 측정임무 지속을 위한
관측 방법 연구
지표
NASA
USGS와 협력하여 지표특성/변화 관
측 담당. (Landsat 프로그램 지속화)
NASA는 특히 위성 개발과 발사 담당
USGS
사용자 요구사항 반영, 위성운용, 지상시
스템 개발운용, 데이터 처리·관리·배포
해색
NOAA
NASA와 협력하여 해양 생태계 모니
터링용 해색 관측. S-NPP의 VI R 탑
재체가 현재 임무 수행 중
해표면
NOAA
해수높이 등을 위한 해표면 및 지표수
높이 측정. Jason 시리즈 고도계 운용
해표면
풍향
NOAA
NASA와
협력하여
해외
Scatterometer 데이터 확보
우주
기상
NOAA
NASA와 협력하여 태양풍, 태양폭발 등
관측정보 제공. GOES, DSCOVR 운용
기후
변화
NOAA
NASA와 협력하여 날씨, 날씨 관련 재
해, 계절성 기후변수 관측
2) 연구목적의 지속적 관측
에어로
졸
NASA
에어로졸, 오존, 수증기 등의 수직적구
조 분석. ISS SAGE 3 탐측기로 분석
대기
이산화탄소
NASA
OCO 위성을 통해 전세계 CO2 측정
지하수
NASA
GRACE 위성을 통해 지하수 추정을
위한 지구 자기장 측정
에너지
균형
NOAA
NASA와 연방기관들 협력하에 지구
시스템의 방출 에너지 이해를 위한
지구 에너지 균형 연구
3) 단기적인 실험적 관측
지구
이해
NASA
NASA
Earth
Systematic
Mission과
Pathfinder Program을 통해 지구시스템
연구
검증
NASA
새로운 위성시스템 기술 검증
표
6. 미국 관측위성 관련 기관별 역할 [2]

김은정 외 / 항공우주산업기술동향 14/2 (2016) pp. 18~27
27
3.7 기타 지원 임무
관측 시스템의 효율적 운영과 이를 통한 투자 효과
를 극대화하기 위해서는 관련 기관들 간의 운영 관련
협력과 조율이 매우 중요하다
. 미국 National Plan은
필수적으로 이행해야 할 협력사항을
supporting
action으로 명시하고 있다 (중요도순으로 협력사항 제
시
). 첫째, 다양한 관측 플랫폼간의 표준화 연계를 통
해 생산되는 정보들이 통합될 수 있어야 하는데
, 통합
대상으로는 데이터 표준
, 개념화 및 용어 통일, 사용자
중심의 규칙 마련 등이 포함한다
. 둘째, 데이터간 상호
운용성을 확보하여 정보의 탐색
, 접근, 사용을 용이하
게 하고 사용자의 편의를 위해 시스템에서 가독 가능
한
(machine-readable) 형태로 제공되어야 한다. 셋째,
관측시스템의 비용 문제
, 성능, 발생가능 리스크간 득
실을 비교하고
(tradeoff), 관측 프로그램 운영에 따른
간접비용과 관리구조를 세밀하게 평가하여 관측시스
템의 효율과 비용절감을 극대화해야한다
. 넷째, 관측
시스템을 업그레이드하고 데이터 배포 범위를 넓혀
지구관측 역량을 향상시키고 관측 범위
(coverage) 간
극을 줄이도록 한다
. 다섯째, 관측시스템의 운영, 관
리
, 수송, 배치, 변경 지원을 위한 인프라를 지원한다.
여섯째
, 지구관측의 공공재로서의 특성을 유지하면서
이와 관련된 민간부문의 혁신과 서비스를 촉진하기
위해 비용대비효과 높은 민간 상업부문과의 협력 방
법을 탐구한다
. 일곱째, 국제협력과 데이터 공유를 강
화한다
. 여덟째, 데이터의 수집, 이용, 광범위한 사용
에 대한 혁신을 촉진하기 위해 민간기업과 일반 대중
의 참여를 확대한다
.
4. 결 론
본고에서는 미국과 유럽의 지구관측 위성 프로그
램의 전략과 기획
, 평가에 이르는 과정에 대해 살펴보
았다
. 지구관측위성 프로그램은 위성뿐 아니라 항공
관측과 지상관측을 포함하는 종합적인 프레임 속에서
기획되고 있으며
, 국가별로 우주관측, 현지관측, 서비
스 등의 책임기관을 지정하여 기획되고 관리되고 나
아가 협력할 수 있는 체제를 구축함으로써 중복을 방
지하고 국가 자원을 효율적으로 활용할 수 있도록 하
고 있다
. 특히 국가적으로 필요한 지구관측 수요에 대
해 중요도
, 필요성, 기술적·경제적 여건 등을 종합 분
석하고
, 이를 통해 지구관측 위성의 세부적인 임무를
구체화하고 나아가 지구관측 위성 시스템의 개발을
결정하고 있다
.
우리나라는 아직까지는 지구관측 활용 수요부처의
수요제기를 반영하여 위성개발 계획을 수립하는 단계
에 있으나
, 증가하는 지구관측 위성수요를 감안할 때
앞으로는 국가적인 차원에서 보다 심층적이고 종합적
인 관점에서
, 지구관측 수요를 분석하고, 항공관측 등
타 지구관측 시스템과의 연계를 강화함으로써 중복을
방지하고 활용성을 극대화 할 필요가 있다
. 이를 위해
서는 지구관측 활용 책임기관을 국가적 차원에서 지
정하여 통합 활용토록 하여야 할 것이다
.
참고문헌
1. Gerard Brachet, “From initial ideas to a
European plan: GMES as an exemplar of
European space strategy”, Space Policy, 20,
2004, pp.7-15
2. National Plan for Civil Earth Observations,
National Science and Technology Council
Executive Office of the President (U.S), 2014
3. National Strategy for Civil Earth Observations,
National Science and Technology Council
Executive Office of the President (U.S), 2013
4. http://www.copernicus.eu
5. Global Monitoring for Environment and
Security – Europe’s next space initiative takes
shape, ESA, 2005
6. EO Portal Directory – Copernicus (European
Commission’s Earth Observation Program)
항공우주산업기술동향 14권 2호 (2016) pp. 28~39
http://library.kari.re.kr
에서 보실 수 있습니다.
산업·정책동향
우주분야 품질인증 제도에 대한 고찰
1)임창호*, 박근영**, 황진영*, 임종빈*, 박정호*
Review On Quality Certification System of Space
Lim, Chang Ho*, Park, Geunyoung** ,Hwang, Chin Young*, Im,Jongbin*, Park, Jung Ho*
ABSTRACT
The quality certification system of space product has been applied by the standards and internal systems
of each space agencies such as NASA, ESA, and JAXA, due to its customized unique characteristics and
project based unit production of space products. while those of the aviation area have been well set up
legally by the third party considering the factors of mass production and passenger safety. Korea still does
not have its own quality certification system and advanced spacefaring countries’ standards and system
has been applied to Korean programs. However, over the past 20 years, Korea has accumulated its
technological capability in space through KOMPSAT series. Space program has been increased and
industries’capabilities also has been strengthened. Thus, in order to enhance the quality and performance
of space products, this study was conducted to review the quality standard and certification system of
advanced spacefaring countries.
초 록
양산과 여객수송이라는 요인으로 인해 제3자에 의한 법적 인증제도가 정착되어있는 항공분야와는 달
리, 우주분야는 1회성 발사라는 특성으로 인해, 법적 제도가 아니라 각 국가의 우주기관별로 자체적으
로 구축한 기준과 제도에 의해 제품을 인증해 오고 있다. 우리나라는 아직까지 독자적인 인증제도가
구축되어 있지 않으며, 우주선진국의 체계 및 제도를 활용하여 개발 및 검증요건을 부여하고 있다. 여
기에는 국내의 우주프로그램이 적기 때문에 인증제도를 유지하는 것이 비효율적인 데에도 그 이유가
있었다. 그러나 그동안 우리나라도 다목적 실용위성 1, 2, 3, 5호 등을 통해 20여 년간 우주분야의 기
술 역량을 축적해 왔으며, 우주개발사업의 양적 증가와 더불어 산업체의 역할도 강화되고 있어, 발전
단계에 걸맞는 지원과 제도적 보완 마련이 요구되고 있다. 본 考에서는 우주제품의 품질과 성능을 제
고하기 위해 품질인증, 제품보증에 대한 선진국의 기준과 제도에 대해 살펴보고자 한다.
Key Words : 품질인증제도, 인증(Certification), 보증(Assurance), 검증(Qualification)
* 임창호
, 황진영, 임종빈, 박정호, 한국항공우주연구원, 미래전략본부, ** 박근영, 한국항공우주연구원 위성연구본부
changho@kari.re.kr, cyhwang@kari.re.kr, jbim@kari.re.kr, jhp@kari.re.kr, parky@kari.re.kr

임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
29
1. 서 론
우리나라는 그간 정부의 지속적이고 일관된 지
원 에 힘입어 짧은 기간에 많은 성과를 이뤄내는
압축 성장을 이룩하였다
. 항공분야에서는 고등훈
련기의 개발과 수출
, 첨단 틸트로터 기술의 스마트
무인기 개발로 무인기 시장을 개척해 나가고 있는
가 하면
, 우주분야에서는 다목적 실용위성 시리즈
와 나로호 개발의 성공
, 그리고 산업체 육성과 지
원을 위한 다목적실용위성
3A호와 차세대 중형
위성 개발에 이르기까지 우주개발 역량구축에 힘
써왔다
. 그 결과 항공우주 산업체의 역량 또한 함
께 성장하여 이제 개발의 중심축과 산업체의 역할
에도 변화가 요구되고 있다
. 이러한 변화의 과정
속에 중요한 요소 중 하나가 바로 품질에 대한 관
리체제이다
. 항공기는 국내법 및 국제법에 의해
강제적으로 요구되는 인증제도로
‘품질인증’제도가
정착된 반면
, 우주제품에 대한 인증제도는 항공분
야와 달리
, 엄밀한 의미에서 국내법 및 국제법에서
요구되지 않으므로 인해 제
3자에 의한 ‘품질인증’
이 이뤄지고 있지 않다
. 이는 우주분야가 갖는 특
성에서 기인한 것이라 할 수 있는데 본
考에서는
이 같이 산업체 중심의 우주개발을 모색하는 시점
에서의 우주제품 개발에 대한 품질보증
, 감리적 성
격의 인증제도에 대한 제반 사항들을 살펴봄으로
써 고품질의 성공적 우주개발을 이끌어 나가기 위
한 제도적 시사점을 도출하고자 한다
.
2. 인증제도 및 품질인증의 개념
2.1 인증제도의 개념1)
2.1.1 평가대상 기준
일반적으로 인증은 평가대상
, 평가주체, 강제여
부에 따라 구분된다
. 먼저 적합성 평가의 대상의
기준으로 제품인증과 시스템 인증으로 나뉜다
.
1)
중소기업수출지원센터, 규격인증기술자료, 인증저널(2003.2, 제7호),
상식으로 읽는 인증용어 – 인증의 종류
Ÿ 제품 인증
(Product Certification) : 인증 대상
이 제품인 경우이며
, 적합성 평가 목적에 따
라 안전
(Safety) 인증, 성능(Performance) 인증
으로 나눌 수 있음
.
Ÿ 시스템 인증
(System Certification) : 인증 대상
이 제품이 아닌 회사
(조직)의 시스템으로, 평
가 목적에 따라 품질경영 시스템
(QMS), 환경
경영 시스템
(EMS), 안전보건 시스템(OSHAS)
등을 들 수 있음
.
2.1.2 평가주체 기준
평가주체에 따른 분류로는
1자 인증과 2자 인증
그리고
3자 인증으로 나뉘는데 항공부문과 우주부
분이 구별되는 인증제도의 큰 차이점이 바로 평가
주체에 따른 분류 형태이다
.
Ÿ
1자 인증 : 자가 적합성선언(Declaration of
Conformity; DOC) 제품군으로서 제조자가
스스로 적합성을 평가하는 방법
Ÿ
2자 인증 : 2자 즉 구매자가 직접 판매자(제
조자
)의 제품이나 시스템에 대해 적합성을 평
가하는 인증 방법
Ÿ
3자 인증 : 구매자, 판매자(제조자)가 아닌 제
3자, 즉 인증기관 등과 같은 조직을 통한 인
증방법
2.1.3 강제성 여부
강제성 여부에 따른 분류 형태로는 강제인증과
임의인증으로 구분하여 볼 수 있다
.
Ÿ 강제
(Compulsory) 인증 : 관련 법규 및 규정
에 따라 적합성 평가를 실시하지 않으면 시
장에 유통시킬 수 없는 인증
Ÿ 임의
(Voluntary) 인증 : 인증획득여부가 전적
으로 신청자의 의도에 달려 있는 강제성이
없는 인증을 말하나
, 실제 임의인증제도 대
부분은 소비자 신뢰도와 민감하게 연결되어
있는 경우가 많아 묵시적 강제성을 띄는 경
우가 많음
.
30
임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
2.2 품질인증의 개념
2.2.1 품질의 정의
품질이란 단순히 제품의 유용성을 형성하는 성
질
, 또는 제품의 사용목적을 달성하는데 필요한
성질이라고 할 수 있다
. 그러나 품질을 정적인 성
질의 관점에서 보다는 설계
, 생산 등의 활동 과정
을 통하여 얻어지는 일련의 성질
, 특성이 축적된
동적 개념으로 이해할 필요가 있다
. 품질에 대하
여
ISO 8402에서는 ‘명시적 또는 암시적 필요를
충족하는 그 능력에 관계되는 제품이나 용역의 형
상 및 특성에 관한 전반적인 사항
(The totality of
features and characteristics of a product or
service that bear on its ability to satisfy stated
or implied needs.)’이라고 정의하고 있으며, 쥬란
(J. M. Juran)은 소비자의 관점에서 품질을 ‘용도
에 대한 적합성
(Fitness for use)’이라고 하고, 크
로스비
(P. B. Crosby) 는 생산자의 관점에서 ‘요
구조건
또는
요구사양에
대한
합치성
(Conformance to requirements or specifications)’
이라고 하였다
.2) 과거 품질의 개념이 제품의 생산
단계에 국한된 활동이었다면 오늘날에는 기획
, 생
산
, 사후단계에 이르기까지 전 과정에 관여되고
있다
.
2.2.2 품질관리, 품질보증, 품질인증
일반적으로 많이 사용되는 품질관리
(Quality
control)는 ‘소비자의 요구에 맞는 품질의 제품을
경제적으로 만들어 내기 위한 모든 수단의 체계
’
(KS A 3001)라고 정의할 수 있으며, 이 정의와 같
이 품질관리는 회사가 사용자의 요구를 충족시킬
수 있는 내부적 품질기준을 정하여 이에 적합한
제품을 경제적으로
, 즉 원가절감, 불량감소, 공수단
축 등의 방안으로 생산할 수 있도록 관리하는 품
질활동을 말한다
. 따라서 품질관리의 주체는 생산
자이고 외부의 간섭을 받지 않고 독립적으로 활동
한다
.
2)
이종휘, ‘항공기 품질인증과 미국제도의 분석’, 1994
으로부터 재인용.
품질보증은
‘소비자의 요구품질이 완전히 만족
되어 있음을 보증하기 위하여 생산자가 행하는 품
질관리 활동의 체계
’ (KS) 또는 ‘제품이나 용역이
품질에 대한 요구조건을 만족할 것이라는 신뢰를
제공하는데 필요한 모든 계획적이고 체계적인 활
동
’이라고 정의할 수 있다. 즉 품질보증은 이러한
품질관리에 의한 품질요구의 충족을 내
・외부적으
로 고객 및 당국에게 시스템적으로 확신시키는 것
이라 하겠다
.
끝으로 품질인증은 품질보증과는 구별되는 개
념으로서
, 법 또는 규정에 의한 증명(Certification)
을 의미하며 여기서 품질인증 업무는 법적 규정에
의한 행정 처리절차라는 협의의 증명이 아니라
,
안전성 또는 공익성에 기초한 품질요구
, 설계의
적합성 및 생산자의 품질보증 체제
, 공정, 제품의
적합성 평가
, 품질의 유지라는 일련의 체계를 의
미한다
.
표
1. 품질관리, 품질보증, 품질인증 비교
구분
요구
기준
검증
주체
입증
주체
입증 목적
(항공기
품질인증)
적용성
(우주분야)
품질
관리
내부
생산자 생산자
제품의
품질 확보
품질관리
품질
보증
내부/
외부
생산자 생산자
제품의
품질 확보
품질보증
품질
인증
외부
(법 및
관련
규정,
표준,
기준,
지침)
정부
당국
또는
전문
기관
생산자
제품의
설계보증
및
품질 확보
시스템
엔지니어링
임무보증/
제품보증
제품생산
체계검증
N/A
(1회
제작으로,
양산시스템에
대한 인증
적용 불가)
완성품
안전성/
운용성
보증
N/A
(양산된 개별
완성품에
대한 안전성/
운용성 인증
불가)

임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
31
2.3 항공우주분야의 인증
2.3.1 항공기 품질인증
항공기는 화물은 물론 여객을 운송하는 측면에
서 그 임무 수행을 위한 성능요구 뿐만 아니라 고
도의 신뢰성과 안전성이 요구된다
. 따라서 설계 및
생산 그리고 운용에 반드시 적합한 증명절차를 거
쳐야 한다
. 항공기 품질인증은 감항기 준에 대한
합치성의 평가라는 절차로 수행되며 항공기의 인
증은
‘형식증명’, ‘생산증명’, ‘감항증명‘의 3가지 개
념으로 구별할 수 있다
. 형식증명은 항공기 설계의
감항기준에 대한 적합성을 입증하는 것이며
, 생산
증명은 승인된 설계형식에 적합한 항공기 및 부품
을 대량으로 생산하기 위한 생산시설
, 생산방법 및
품질관리체제를 승인하는 것이다
. 끝으로 감항증명
은 제작된 항공기가 승인된 형식설계와 합치하고
안전한 작동 상태에 있음을 증명하는 것으로 개별
항공기 마다 감항증명을 소지해야하며 항공기 운
항에 필수적이다
. 이 같은 점으로 볼 때, 항공기
품질인증은 항공기의 설계관점에 대한 평가 및 승
인과 항공기의 대량생산을 위한 생산시스템에 대
한 평가 및 승인
, 개별 항공기의 최종 안전성상태
에 대한 평가 및 승인으로 구성되어 있음을 알 수
있다
.
2.3.2 우주 품질인증3)
항공기와 달리 우주제품은 대량생산을 목적으로
하지 않으므로 대량 양상을 위한 품질시스템에 대
한 인증 또는 양산시스템으로 생산된 개별 완성품
에 대한 안전성
/운용성 인증 개념을 적용하는 것
이 불가능하다
. 다만, 자체적인 표준, 기준 및 절
차에 따라 수행되는 시스템 엔지니어링
, 임무보증,
제품보증
, 과제관리 활동을 통해 ‘항공기 품질증명’
의 증명과정인 적합성 평가에 준하는 구조계
, 전력
계
, 자세제어계, 열제어계, 원격측정명령계, 조립시
험 등 설계 분야 및 운용 분야에 대하여 계산
, 시
험
, 검증, 유사성 등의 방법으로 검증을 수행한다.
3)
미래창조과학부
, 「우주제품 품질보증제도 도입을 위
한 기획연구
」, 2016.
생산시스템 규정에 대한 적합성 평가는 수행되지
않으나 개발과정 및 비행모델 제작과정에서 생산
자의 품질보증이 제대로 작동하도록
, 절차 검증,
공정 검증
, 자격검증 및 교육에 대한 평가 및 감사
를 실시하게 된다
. 항공분야와의 가장 큰 차이점이
라면 민간항공기 분야는 법적 강제인증 성격을 띤
3자 인증 성격의 제품인증(항공기 설계승인과 부품
설계승인
)과 시스템인증(생산체제승인)이 함께 제
도화되어 운용되고 있는 반면
, 우주분야는 품질보
증
(제품에 대한), 제품보증, 임무보증 및 시스템 엔
지니어링 요건이 계약에 의한 요구사항으로 부여
되어 관리되는
2자 인증 형태로 운용된다는 점이
다
. 우주 분야의 인증제도가 발전할 수 없는 근본
적인 이유는 일반적으로 승객을 수송하지 않으며
우주분야의 시장규모가 항공분야와 비교하여 작고
항공기와 같이 양산개발이 아닌 수요자의 요구에
따른
1회성 개발이라는 특성이 작용하고 있기 때
문이다
.
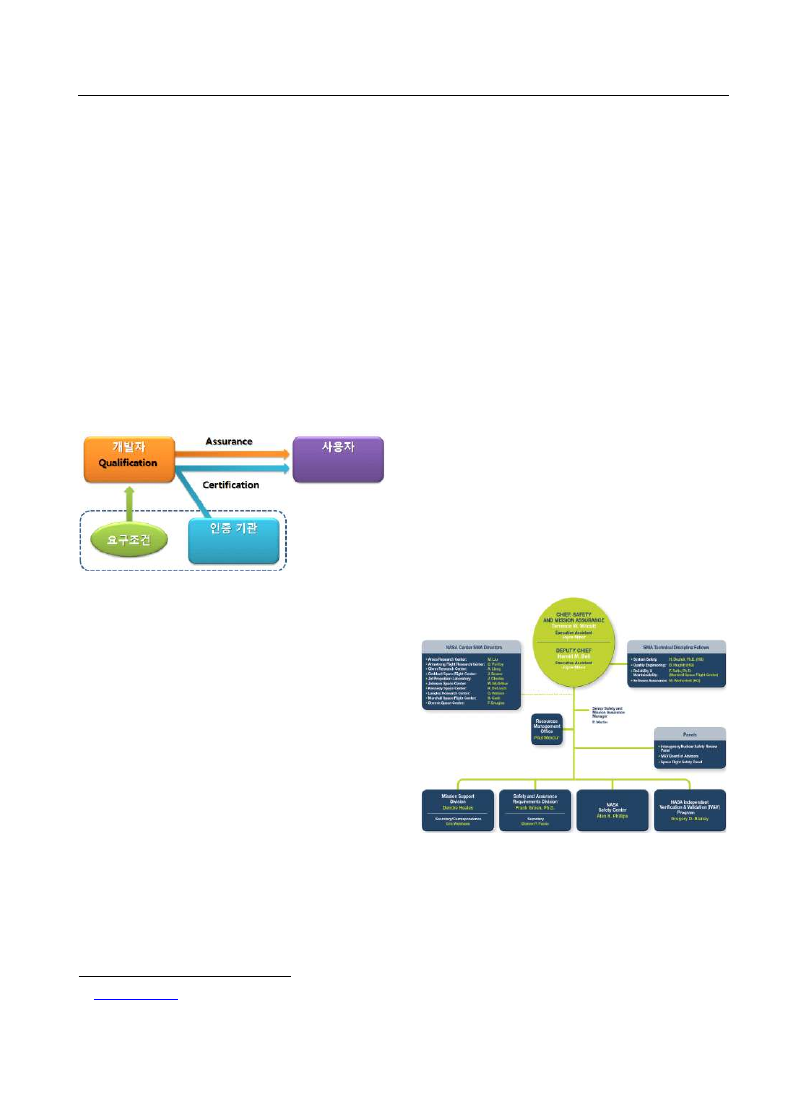
또한 우주 개발에 있어서 인증
(Certification)과 혼용되거나 유사한 개념으로서,
검증
(Qualification) 및 보증(Assurance)이 있는데
이는 모두 성능 요건 만족을 보이기 위한 행위
, 방
법
, 주체와 관련되어 있다고 할 수 있다. 국제항공
우주품질그룹
(International
Aerospace
Quality
Group, IAQG)은 인증, 검증을 다음과 같이 정의
하고 있다
.4)
Ÿ 인증으로 불리는
Certification을 특정한 제
품
/서비스/조직이 규정된 요구조건에 부
합하다는 것을 증명하는 문서인 인증서
(certificate)를 얻기 위한 일련의 절차로 정
의하고 있음
.
Ÿ 품질인증
또는
검증으로
불리는
‘Qualification’을 규정된 요구조건을 이행
할 수 있는 능력을 문서로서 실증하는 것
으로 정의하고 있음
.
美
NASA에서는 품질을 “고객 요구조건을 만족
하는 상태
(State of compliance with customer
4)
출처 : https://www.ase.org/iaqg/
32
임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
requirements)”로 정의하고 있으며 품질보증은 “품
질을 만족하기 위한 도구
, 방법, 프로세스(Tools,
methods, processes by which the state of quality
is achieved)”로 정의하고 있다.5) 이와 같이, 인증,
검증 및 보증은 기관별로 다를 수 있으나 다음과
같이 개략적으로 이해할 수 있다
.
Ÿ
Certification(인증) : 제품이 성능 요건을
만족함을 제
3자가 평가하여 보증.
Ÿ
Qualification(검증) : 제품이 성능 요건을
만족함을 확인하는 것으로 개발자가 수행
.
Ÿ
Assurance(보증) : 제품의 성능이 만족함을
개발자가 평가하여 보증
.
그림
1. 검증, 인증, 보증의 개념도
성공적인 우주 비행 궤도 운용을 통해 비행 이
력
(Flight Heritage)을 보유한 우주 제품을 우주 입
증
(Space
Proven)
또는
우주
검증
(Space
Qualification)된 제품으로 부르고 있으며, 이러한
제품의 신뢰성은 국제적으로도 인정받고 있다
. 결
론적으로 말하면
, 전술한 바와 같이 항공분야는 3
자 인증제도인 항공기 인증 제도를 통해
, 우주분야
는
2자 인증제도를 품질보증(넓은 의미에서 제품보
증
, 임무보증의 개념을 포함)으로 고객의 품질을
만족시키기 위한 활동을 수행하고 있다고 이해할
수 있겠다
.
3. 주요 국가별 인증제도 현황
5)
3.1 미국(NASA)
3.1.1 NASA의 품질인증 조직 및 기능
미국
NASA는 SMA(Safety
and
Mission
Assurance)를 통해서 NASA의 모든 프로그램에
대한 안전 및 임무보증에 대한 활동을 수행하고
있다
. 이를 위해 NASA는 청장 직속의 독립적인
조직인
Office of Safety and Mission Assurance
(OSMA)를 두고 있으며 NASA 본부 외에 10개의
각 센터별로
SMA 인원을 유지운영하고 있다.
OSMA는 임무 지원 부서(Mission
Support
Division), 안전 및 보증 요구사업부(Safety and
Assurance Requirements Division), NASA 안전
센터
(Safety Center) 및 독립 검증 및 확인 기관(IV
& V Facility) 등으로 구성되어 있으며 이러한
SMA 조직은 NASA의 모든 활동에 대한 안전을
보장하는 것을 목적으로
, 우주제품의 개발 및 구
현
, 기관 차원의 안전성, 신뢰성, 정비성 및 품질
보증 정책 및 절차의 감독 전반에 걸쳐 다음의 활
동을 수행하고 있다
.
그림
2. NASA SMA 조직구성
Ÿ
SMA 전략, 정책 및 표준의 제정 및 이행
적합성 보장
Ÿ 안전성
(Safety), 신뢰성(Reliability), 정비성
(Maintainability)
및
품질보증
(Quality
Assurance) (SRM & QA)에 대하여
NASA 프로그램의 운영 초기 및 라이프

임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
33
사이클 내 통합 촉진
Ÿ 위험 식별 및 평가 방법론 개선 및 위험
완화대책 및 허용기준 제공
Ÿ 독립적인
SMA 평가 및 프로세스 검증검토 수
행
Ÿ 중요 안전 결정을 위한 분석 및 권고사항 제공
Ÿ
SRM & QA 기술, 프로세스 및 안전성과
신뢰성을 향상시키고 임무성공 비용을 절
감하는 기법의 혁신과 신속한 전파 지원
이
SMA의 활동을 위한 각 문서는 청장과 부청
장이 통제하는 최상위 문건인 수준
0의 문서에서부
터 최하위 구성요소를 다루고 있는 수준
5의 요구
서로 구성된다
. 또한 이 안전표준에 대한 문서들은
책임과 역할에 대한 권한도 함께 부여하고 있으며
각 프로그램을 실행하기 위해서는 기관차원의 요
구서
(requirements)가 만족되어야 한다.
3.1.2 NASA의 품질인증 정책
NASA 품질정책은 독립성(Independence), 객관
적 품질자료
(Objective Quality Evidence), 시정조
치
(Corrective Action), 공급자 관리(Supply Chain
Control), 자격 및 경험(Competence)의 5가지 측면
에서 이루어진다
. 첫째, 독립성은 비용 또는 일정
에 직접적으로 관련되지 않은 사람이 품질업무 수
행한다는 정책이고
, 둘째, 객관적 품질자료는 기록
으로서 품질요구조건에 대한 증명한다는 정책이다
.
또한 시정조치와 관련된 정책은 다음의 사항을 담
고 있다
.
1) 근본 원인 확인
2) 불합치 품목의 범위/수량 확인
3) 불합치 품목에 대한 시정조치, 교체, 수
리
, 승인된 처리지침
4) 예방 활동
5) 효과의 유효성 확인
그리고 공급자 관리의 경우
, 공급망 전체에 대
해 품질요구조건을 확인하도록 하고 있으며 끝으
로 자격 및 경험
(Competence)과 관련된 정책은 아
래의 내용을 담고 있다
.
Ÿ 수행되는 품질 기능에 대한 지식
, 기술, 경험
Ÿ 제품
, 공정, 보증이 필요한 특성에 대한 지
식
, 기술, 경험
Ÿ 특별한 기능을 수행하는데 필요한 공식적
인 자격인증
NASA의 각 연구실 또는 센터 단위의 연구개
발에 대한 품질보증은 각 센터 소속의
SMA 조직
에 의해 수행되며 공급업체에서 생산되는 제품은
해당되는
SMA 조직이 계약, 품질보증계획, 품질
심사 및 평가 업무를 수행하고 그 외 품질보증
관련
업무는
DCMA(Defense
Contract
Management Agency)의 정부조달규정에 따라 관
련 정부검사기관에서 별도로 수행하고 있다
. 또
한
, NASA는 품질보증 수행을 위하여 품질보증
관련 규정
, 절차 등을 제정, 적용하고 있으며
NASA 품질보증 체계에 중심이 되는 규정은
NPD 8730.5 “NASA Quality Assurance Policy”
를 근간으로
NPR 8735.2 “Management of
Government Quality Assurance Functions for
NASA Contracts”가 대표적이다. 정부계약 품질보
증은 일반적으로 문서검토
, 제품보증, 품질시스템
평가
, 품질자료 분석, 불합치보고 및 시정조치, 최
종 수락 등으로 이루어진다
. 문서검토는 계약자
품질시스템 절차
, 기술문서(데이터, 도면 등), 제조
공정 문서 등에 대한 검토를 수행하는 것으로 주
기적으로 이루어지며
, 계약자의 품질시스템에 영
향을 미치는 수준의 문서변경이 있을 경우에도
문서검토를 수행한다
. 제품보증 활동은 제품 검
사
, 공정 입회, 기록 검토 등으로 구성된다. 공급
자의 제품이 계약 요구조건에 합치하는지를 검사
하고 공정이 지침에 따라 이뤄지는지를 확인하기
위해 입회하기도 하며 기록된 증거 등을 검토하
게 된다
. 이러한 협력업체에 대한 품질시스템 평
가는 최소 매
2년 마다 수행된다.
3.2 유럽
3.2.1 유럽의 인증 체계 및 조직 설립배경
미국에 비해 후발주자인 유럽은 각국의 우주기
관 별로 별도의 표준체계를 유지하고 있었으며 미

34
임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
국에 비해 상대적으로 산업의 규모가 작은 유럽
각국의 표준화는 제한적으로 이루어질 수 밖에 없
었다
. 인증, 보증을 위한 선결작업으로 표준화를
마련하였는데
1982년에 ESA, NASA, CNES(프랑스
국립 우주연구소
)가 함께 CCSDS(Consultative
Committee for Space Data Systems)를 구성하여
유럽 우주기술 표준화의 단초를 마련하였다
. 현재,
CCDSD에는 일본의 JAXA를 포함하여 약 10여 개
국의 우주기관이 참여하고 있다
. 유럽의 우주기술
규격인증은
유럽
우주기구
(European
Space
Agency, ESA)에 마련되었다. ESA는 1993년 유럽
우주표준 협회
(European Cooperation for Space
Standardization, ECSS)를 출범시키고, 유럽이 개발
하는 우주 제품의 기술을 표준화하고 있다
.
3.2.2 유럽의 표준과 인증 관련 조직
① EU 집행위원회 (EC)
EC는 우주정책과 항공, 안보, 국방의 조정과 관
련하여 특별세션을 두고 있다
. 2007년 6월 25일,
EC는 우주산업표준을 만들기 위해 유럽표준화위원
회
(CEN, comite europeen de normalisation), 유럽
전기표준위원회
(CENELEC, European Committee
for Electrotechnical Standardization), 유럽전기통
신표준협회
(ESTI,
ETSI(European
Telecommunications Standards Institute)에 그 업
무를 위임하고 우주관련 표준 을 만들기 위해 아
래의 목적을 명시하였다
.
Ÿ 우주 하드웨어와 서비스의 적절한 안전
수준 보장
Ÿ 갈릴레오와
GMES(Global Monitoring for
Environment and Security), 그리고 위성
통신분야 프로젝트 같은 유럽연합의 프로
젝트를 육성
Ÿ 유럽
최종
사용자
단말기
(end-user
terminals)의 출현을 촉진
Ÿ 우주 잔해물과 같은 우주관련 위협의 완화
Ÿ 유럽 우주산업의 국제 경쟁력 지원
그 결과
1985년 5월 7일 유럽이사회에서 기술
표준의 새로운 접근
(new approach)을 하도록 결의
하였다
. 취지는 EC와 표준관련 기관의 책임을 명
확히 서술하는 것으로 제품이 시장에 나오기 전에
필수적 표준에 대한 요구를 충족해야 함을 밝히고
있다
. 또한 유럽의 각 표준 기관들은 상세한 기술
적 요소들을 다루도록 하고 있으며 아울러 유럽연
합
, ESA, 개별 회원국이 참여하는 다양한 우주시
스템의 통합을 제시하고 있다
.
② 유럽표준화위원회(CEN)
유럽표준화위원회
(이하, CEN)은 27개 회원국의
국가표준기관들과 유럽 자유 무역 지역
(EFTA)의 3
개국 연합체로 합의과정을 통해 표준을 제정하는
역할을 하고 있다
. CEN이 채택하는 유럽 표준
(EN)은 곧 30개 회원국의 국가표준이 되는 것이다.
CEN은 우주분야의 유럽표준의 개발을 위해 유럽
우주표준기구
(ECSS)와 긴밀하게 협력하고 있는데
유럽우주표준기구
(ECSS)가 발의한 문서는 CEN의
절차를 거쳐 표준으로 채택된다
. 현재, CEN은 우
주시스템과 관련하여
45개의 표준을 발행하였으며
다음은 품질보증과 안전에 직접적으로 관련된 표
준이다
.
Ÿ 우주 품질보증 일반 요구서
, Part1, 방침과
원칙
, Document EN 13291-1:1999
Ÿ 우주 시스템 –위기관리
(ISO 17666:2003),
Document EN ISO 17666:2003
Ÿ 우주 품질보증
-테스트 센터 품질보증,
Document EN 14736:2004
Ÿ 우주
품질보증
-불일치 통제 시스템,
Document EN 14097:2001
Ÿ 우주 시스템
-안전 요구서, Part 1:시스템
안전
(ISO 14620-1:2002), Document EN
ISO 14620-1:2002
Ÿ 우주 품질보증
-일반 요구서, Part 3: 재료,
기계부분과 프로세스
,
Document
EN
13291-3:2003
Ÿ 우주 품질보증
-수온 진공 가스발출 테스트,
Document EN 14091:2002
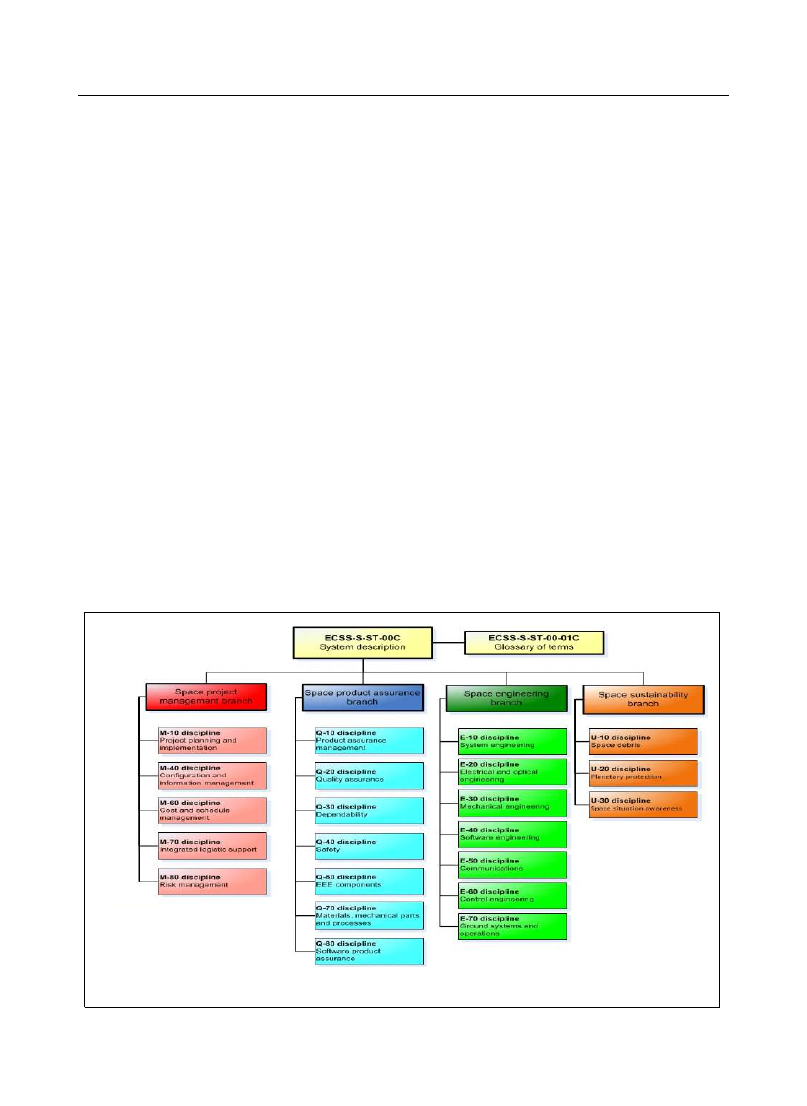
임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
35
Ÿ 우주
품질보증
-온도 사이클링 실험,
Document EN 14091:2002
Ÿ 우주 품질보증
-코팅 및 마감재의 오프 강
도 측정
, Document EN 14099:2001
Ÿ 우주 품질보증
-우주 재료 스크리닝 가연성
테스트
, Document EN 14090:2002
Ÿ 우주 품질보증
-제한된 저장 수명 재료의
제어
, Document EN 14089:2002
Ÿ 우주 품질보증
- 유인우주비행선에 사용될
오프 가스 처리 제품 결정
, Document EN
14100:2001
Ÿ 우주 품질보증
-부식 및 균열제어 재료의
선별
, Document EN 14101:2001
③ 유럽우주표준기구 (ECSS)
유럽우주표준기구
(ECSS)는 우주 안전 표준화에
대하여 가장 심도 있는 논의를 하고 있는 기구로
우주프로그램의 모든 단계에서 안전표준이 중요해
지면서
, 유럽의 모든 우주 활동들에서 사용자 친
화적인 단일 표준을 개발하기 위해 설립된 기구이
다
. 표준화 활동은 유럽의 우주공동체 전체를 위
한 프로젝트 관리에서부터
, 품질보증, 그리고 엔지
니어링 활동 영역에 이르기까지 모두 영역을 다루
고 있다
. ECSS는 현재까지 147건이 넘는 우주 기
술 규격을 제정하였다
. 여기서 다루는 우주 엔지
니어링에는 시스템 엔지니어링
, 전기/광학 엔지니
어링
, 기계 엔지니어링, 소프트웨어 엔지니어링,
통신
, 관제 엔지니어링, 지상시스템 운영 부문으로
구분되어 있다
. 한편 제품보증은 제품보증관리, 품
질보증
, 신뢰성(Dependability), 안전성, EEE 부품,
자재
/부품/공정, 소프트웨어 제품보증 부문으로
구분된다
. 여기에 참여하는 유럽우주기관들은 다
음과 같다
.
Ÿ 이탈리아 우주청
(ASI), 벨기에 연방과학정책
실
(OSTC), 영국우주청(舊BNSC), 프랑스 국립
우주센터
(CNES),독일우주청(DLR),
유럽우주
청
(ESA), 네덜란드 우주청(NIVR), 노르웨이
우주센터
(Norwegian Space Centre)
그림
3. ECSS의 우주 규격 체계
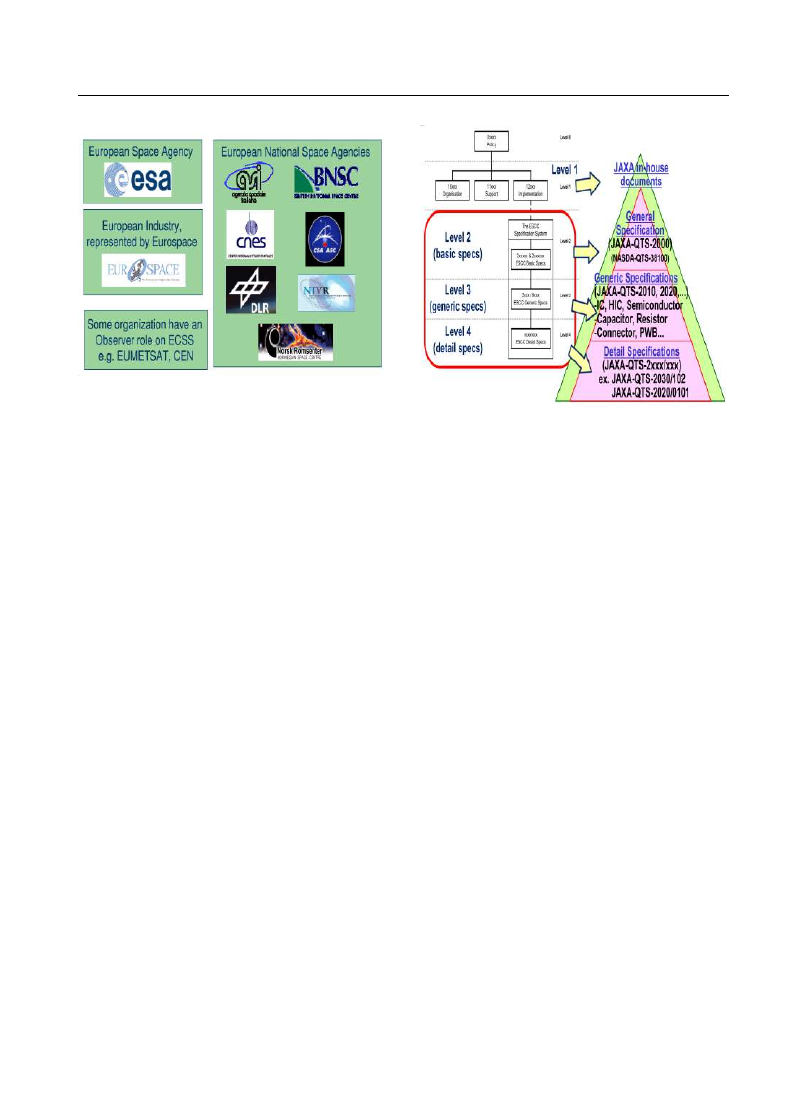
36
임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
그림
4. ECSS 참여 기관
3.3 일본
일본은 우주 개발을 위한 표준시스템 개발을 위
해 미국과 유럽의 제도를 지속적으로 학습해왔으
며 이를 자신의 특성에 맞는 우주 표준 시스템으
로 형성해가고 있다
. 일본항공우주개발기구(이하,
JAXA)는 유럽의 규격체계와 유사하게 표준규격
체계를 만들었다
. 상위개념의 규격(level 1)은 자체
적으로 만들었으며 이하 기본규격
(Level 2), 일반규
격
(Levle 3), 상세규격(Level 4)은 유럽의 ECSS의
규격체제를 차용하여 유사한 구조로 제정하였다
.
이중 일반규격
(Levle 3)은 주로 부품인증에 적용되
는 규격으로
JAXA 인증 체계에서는 평가를 인증
단계에 포함되지 않는 반면
, ESCC 시스템에서는
인증시험
(Qualification Test) 단계를 포함되어 있
다는 것이 차이점이다
. 우주개발 초기, 일본 역시
국산 규격이 없었으며 초기 과학 위성은 지상통신
장치에 사용된 중 신뢰성 높은 부품을 우주용으로
평가
(Up-screening)하여 사용하기도 하였다.
그
후
, NASDA(現 JAXA)에서 국방(MIL)규격을 기반
으로 한 인정부품
(qualified part) 제도를 도입하여
부품의 규격화를 진행하였으며 우주 환경에 적합
한 부품의 개발을 진행하였다
. 이후 JAXA는 로켓,
인공위성
, 탐사선에 이르기까지 모든 우주제품 개
발에 기술표준을 마련하였다
.
그림
5. JAXA vs ESCC 문서체계
그 표준을 살펴보면
, JAXA는 크게 프로그램 관
리 요구사항을 규정하는 관리표준
(JMR) 시리즈와
기술표준
(JERG) 시리즈의 두 가지 범주로 구분하
였다
. JERG 문서는 공통/ 로켓/ 위성체/ 지상시
설의
4개 기술 분야로 나누어져 있다. 공통에는 우
주용고압가스 설비
, 전자기기의 접착공정표준 등
공통사항을 로켓에는 발사장 안전기술
, 로켓탑재
소프트웨어 개발표준 등이 있으며 위성체 설계 표
준에는 위성체 설계표준
, 일반시험 표준, 우주환경
표준 등이 있으며 끝으로 지상섹션에는 지상장비
품질보증
, 지상소프웨어 표준 등을 담고 있다. 이
같은 표준은
JAXA뿐만 아니라 다른 관련 기관이
나 협력 산업체에도 적용하도록 하고 있다
. 이 같
은 표준은 과거 위성개발을 통해 축적한 데이터와
경험을 바탕으로 한 것으로 국제적인 표준 규격과
도 최대한 일치시키고자 노력하였다
. 위성체를 예
로 보면
, 미션 정의부터 시작하여 위성체 설계/제
작
/시험/발사를 거쳐 궤도에서의 운영과 최종 운
영이 종료되는 시점까지 전 라이프 사이클을 포함
하고 있다
. 즉 품질 표준과 규격을 바탕으로 설계
단계에서부터 이후 수반되는 활동과 임무달성
, 안
전성
/신뢰성 확보, 임무 보증 등을 충분히 고려한
일련의 활동을 수행하고 있는 것이다
.
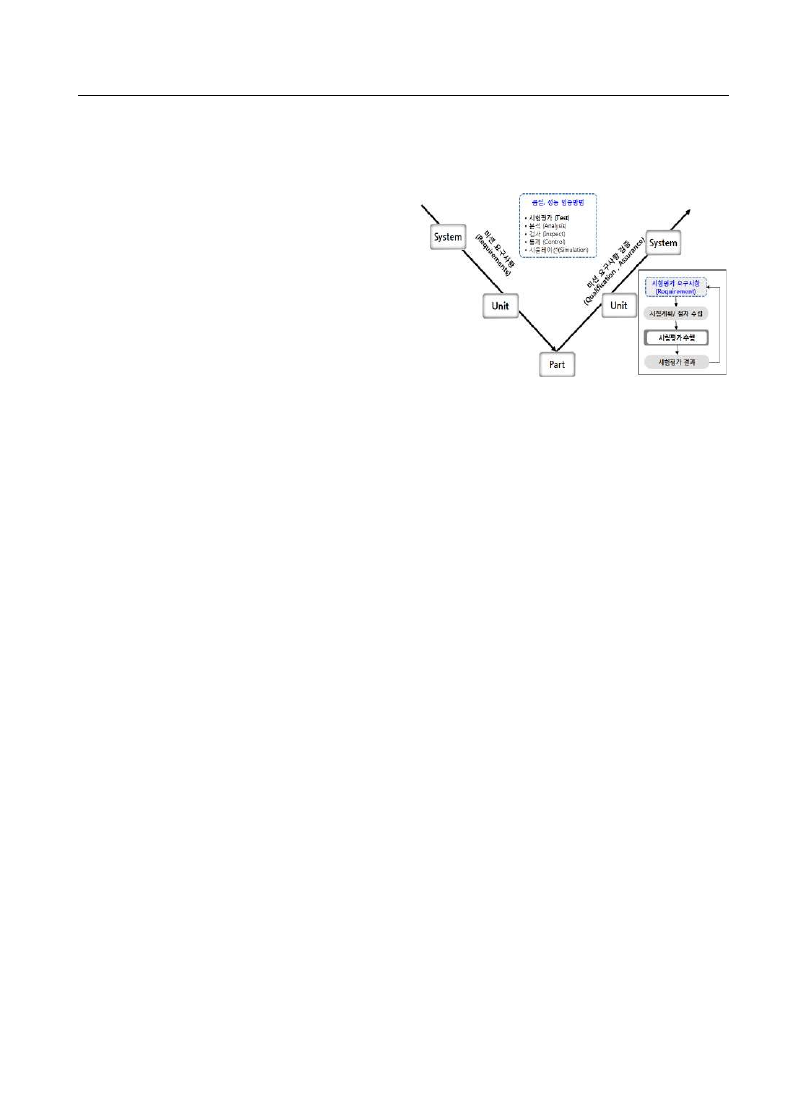
임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
37
4. 우리나라의 우주인증제도 현황
4.1 우주인증의 법률적 근거
관련 국내 법률로는
‘항공우주산업개발촉진법
시행규칙
’에 따라 ‘성능검사 및 품질검사’가 있다.
이에 따르면 우주제품은 해당 법규에 따른 검사를
받도록 규정되어 있으나
, 해당 법규는 ‘항공우주산
업사업자
’가 생산하는 제품으로 국한하고 있어서,
인공위성에 대한 검사 대상이 명확하게 규정되어
있지 않으며 관련 기술 기준 체계 역시 명확하지
않다
. 또한 해당 법규가 국내 우주 제품의 성능 및
품질 보증에 요구된 사례는 없다
.
4.2 제도운영
전술하였듯이 우주 제품인증에 대한 법률적 근
거는 있으나 실제적으로 운영하기에는 그 기술적
기준과 인증기관에 대한 부분이 명확히 마련되지
못한 점으로 인해 현재 항공분야와 같이 독립된
인증기관의 제
3자 인증업무는 하고 있지 않으며
우주 프로그램에 따라 우주선진국의 체계 및 제도
를 활용하여 개발 및 검증요건을 부여하고 있다
.
또한 국내의 우주 산업 기반이 선진국에 비해 취
약하여
, 국내 업체가 선진국의 우주 인증을 직접
획득하는 것 또한 쉽지 않고 수요가 적은 관계로
국내 인증제도를 운영하는 것이 비효율적이라는
지적도 있어 왔다
. 이런 환경 속에서의 인증체계의
구축은 범위
, 유지방안 및 실효성을 함께 고려할
필요가 있겠다
. 현재 우주 기술은 대부분 해외 선
진국에서 인증된 기술 규격 및 부품 공정에 기반
하고 있으므로 선진 기술에 대한 종속성이 크다
.
따라서 향후에 기술 전략적 측면에서 국내 자체
기술 기준 및 표준화 작업이 선행되고 이를 바탕
으로 인증 제도의 마련이 이뤄져야 할 것으로 보
인다
.
4.3 품질보증 기준
현재는
2자 인증의 형태로 국내 개발 위성사업
에서 품질보증과 관련된 기준이 계약 요구조건의
일부로서 부여되고 있다
.
그림
6. 우주제품 품질, 성능평가 절차
4.3.1 시스템 엔지니어링 및 위험 관리 기준
인공위성에 탑재되는 장비품의 성능 및 품질을
보증하고 개발에 따른 위험도
(Risk)를 경감하기 위
하여 제품의 설계
, 제작, 그리고 시험 검증 과정에
대한 체계 및 절차 기준을 규정하고 있다
. 이러한
절차 기준은 계약 요구조건을 통하여 협력업체에
요구되는데
, 협력업체는 개발 일정의 진도에 따라,
품질 감사
(Audit), 설계 검토 회의(Design Review),
제작 착수 승인 회의
(Manufacturing Readiness
Review, MRR), 시험 착수 승인 회의(Test
Readiness Review, TRR) 등을 통하여 항공우주
(연)이 협력업체의 개발 진도를 점검하고, 이를 통
해 장비품 개발의 위험도 관리에 참여할 수 있도
록 하고 있다
. 이러한 프로그램 검토 위원회는 협
력 산업체에서 수행되는 제품의 개발체계를 검증
하고
, 개발 과정에서 발생 할 수 있는 위험 요소를
사전에 식별하고 관리하여 제품의 최종 성능 및
품질을 확보하는데 도움을 주게 된다
.
4.3.2 우주 환경 검증 기준
위성체가 발사체에 탑재되어 지상으로부터 우주
궤도에 진입하는 과정에서 진동
, 충격, 음향가진과
같은 발사환경에 노출되며
, 궤도에 진입 후 고진
공
, 고온 및 극저온과 같은 우주환경에 노출된다.
또한 위성체는 발사하는 순간 발사장에서 사용되

38
임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
는 레이다 등과 같은 강한 전자파 환경에 노출되
며
, 위성체 내부의 탑재물과 지상시스템과의 통신
시 강한 전자파 환경에 노출된다
. 이와 같은 우주
환경 때문에 위성체의 주요 부품에 기능 장애가
초래되어 임무 실패로 이어지기도 한다
. 따라서 이
를 방지하기 위해 위성체는 지상에서 우주환경시험
을 거쳐 기능 및 작동상태를 충분히 점검해야 하
며
, 이를 위해 세계 각국에서는 시험을 수행할 수
있는 시설을 구축하여 각국의 시험 규격을 확립
,
환경시험을 수행하고 있다
. 또한 규격에 대한 활발
한 개정도 이루어지고 있다
. 항공우주(연)은 우주
제품의 설계 및 시험을 위해 우주 환경 규격을 발
행하여 위성 유닛 개발에 적용하고 있으며 유닛 개
발을 담당하는 해외 및 국내 협력 업체는 이러한
우주 환경 규격에 따라 제품을 개발하고 검증하여
야 한다 이를 통해 우주 환경 적합성이 입증된 제
품에 한에 인공위성에 탑재가 허용된다
. 항공우주
(연)의 우주 환경 규격은 미 국방 규격(MIL-STD)
및
NASA의 우주 환경 검증 규격을 참조하여 적용
하고 있으며
, 과제의 임무 환경에 맞게 세부 조건
을 테일러링하여 적용하게 된다
. 아울러 제품보증
요건도 계약요구 조건으로 부여되고 있다
.
이 밖에도 시스템 구성수준에서 살펴보면
, 우
주 제품의 인증범위를 볼 때 우주시스템을 구성하
는 기본단위가 되는 유닛 레벨에 대한 인증제도는
전 세계적으로도 운영되고 있지 않듯이 우리나라
역시 운영하고 있지 않다
. 대신 해외 우주 선진국
은 유닛을 이루고 있는 기초 핵심 구성요소인 전
기전자부품
(EEE Parts), 소재, 공정, 기술숙련도
(Workmanship)에 대해서 인증의 대상으로 포함하
고 있으며
, 그것도 자신들이 주도하는 우주프로그
램에 한해 적용을 요구하고 있다
.
5. 결 론
우주분야는 구매자의 요구사항으로 인해 우주제
품 하나하나가 모두 다른 매우 특별한 제품특성을
가지고 있고
, 또한 대부분의 우주자산은 1회성 발
사를 한다는 점에서
, 구매자 즉 고객의 요구사항을
충족시키는 것에 초점이 맞추어져 성능과 기능을
검증해 왔다
. 즉, 항공기는 양산과 여객수송을 위
한 신뢰성과 안전성이 무엇보다도 중요한 특성으
로 인해 국제법과 국내법에 따라 객관성과 독립성
을 가진 제
3자에 의한 품질인증 제도를 구축하고
있는 반면
, 우주제품은 구매자의 요건을 충족시키
는 성능인지에 대해 품질인증을 하며 그 기술표준
과 세부사항에 대해서도
NASA 등 국가 우주기관
이 자체적인 기준과 요건을 제정해 운영해 오고
있다
. 국제적으로는 우주개발의 최선진국이라 할
수 있는 미국이 기술에 대한 표준과 검증기준을
마련하였다
. 뒤이어 유럽은 각 국별로 운용해 오던
기술표준을 통합하고 그에 따른 검증기준 등을 마
련하였으며
, 일본 역시 이러한 양측의 기준과 제도
를 잘 활용하여 자국의 상황에 맞는 기준과 제도
를 마련하였다
.
현재 우리나라는 독자적인 우주분야의 품질보증
및 인증제도는 구축되어 있지 않으며
, 우주선진국
의 체계 및 제도를 활용하여 개발 및 검증요건을
부여하고 있다
. 여기에는 국내의 우주프로그램이
적었기 때문에 산업계의 수요 및 인프라가 작아
독자적인 인증제도를 유지하는 것이 비효율적인
데에도 그 이유가 있어 왔다
. 그러나, 우리나라의
경우도 다목적 실용위성
1, 2, 3, 5호 등을 통해 기
술역량을 축적해 왔으며
, 다목적실용위성 3A호를
필두로 산업화에 대한 투자와 노력이 강화되고 있
는 등 우주개발에서의 산업체 역할이 변화되고 있
다
. 따라서 그에 따른 지원과 제도적 보완 마련이
요구되고 있으며
, 그 중 하나로 고려할 수 있는 것
이 산업체 우주개발과정에서의 전문연구기관의 품
질인증에 대한 검증과 감리적 기능일 것이다
. 이를
위해
, 우리나라에서도 우주선진기관의 사례와 기준
들을 우리의 실정에 맞게 구성하고 정비해야 하며
그 첫 작업이 각 기술에 대한 표준화와 기준을 마
련하고 그것을
DB화하는 것이다. 이후 이를 바탕
으로 선진 우주기관과 같은 제도를 마련하고 상호
협력하여 상대기관의 제도와 기준에 신뢰를 구축
해야 할 것이다
.

임창호 외 / 항공우주산업기술동향 14/2 (2016) pp. 28~39
39
참고문헌
1. 김은정, ‘미국 정부 및 NASA의 우주산업 정책
현황
’, 항공우주산업기술동향 12권 1호(2014)
2. 김한택, 「국제항공우주법」, 2012 제2판
3. 동명사, 「신국제항공우주법-이론과
실제
」,2013
4. 미래창조과학부 , 「우주제품 품질보증제도
도입을 위한 기획연구
」, 2016
5. 이종휘, 「항공기 품질인증제도와 미국의
제도 분석
」, 항공우주연구소, 1994
6. 조상연 외,‘한국형발사체 사업에서의 제품보증
활동 현황
’,항공우주산업기술동향 13권 1호(2015)
7. 중소기업수출지원센터, 규격인증기술자료,
인증저널
(2003.2, 제7호)
8. 최우영,‘일본 항공우주분야 정책 결정 구조에
대한 관찰
’,항공우주산업기술동향 12권2호(2014)
9. 항공대학교 출판부, 「항공법 이론과
실무
」,2012 개정판
10. JAXA, ‘Spacecraft design standards tree’
2012.12
11. JAXA, ‘Spacecraft design standards’
,JERG-2-000A, 2013.3
12. Joseph N. Pelton, Ram S. Jakhu, 「Space
Safety, Regulations and Standards」,2010
13. NASA, ‘Procedure Requirements, NPR
7123.1B’ 2013.4
14. http:www.ase.org/iaqg/
15. http: www.cen.eu
16. http://ecss.nl
17. http://ec.europa.eu/
18. http://global.jaxa.jp
19. http:www.nasa.gov


항공우주산업기술동향 14권 2호
기술동향

항공우주산업기술동향 14권 2호 (2016) pp. 43~54
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
우주 폐기물(쓰레기) 제거 방식에 대한 고찰
1 )
최준민*
Study on Methods for Space Debris Removal
Choi, Joon-Min*
ABSTRACT
With the development of space technology, the amount of space debris continues to increase.
Consequently, the collision risks between expensive satellites conducting import tasks and space
debris are constantly increasing. In order to mitigate these risks, all the countries should minimize
space debris complying with the "space debris mitigation guidelines" which UN approved in 2007.
Further, space debris, which already exists, must be actively removed. Space developed countries
have proposed various ways to remove space debris and some technologies are realized. However,
overall technology maturity is still in low level. In such a time, this paper introduces various ways
currently being proposed and qualitatively analyzes pros and cons of them.
초 록
우주기술의 발전과 더불어 지구 궤도를 선회하는 우주 폐기물
(우주 쓰레기)의 양은 계속 늘어나고
있다
. 따라서 매우 중요한 업무를 수행하는 고가의 위성들과 우주 폐기물이 충돌할 위험도 시간이 갈
수록 커지고 있다
. 이러한 위험을 줄이기 위하여 우주 폐기물의 발생이 최소화 되도록 모든 국가들이
2007년 UN이 승인 한 ‘우주 폐기물 경감 가이드라인’을 준수하고 더 나아가 이미 존재하는 우주 폐기
물을 적극적으로 제거하는 일을 더 이상 미룰 수 없게 되었다
. 우주 선진국을 중심으로 우주 폐기물을
제거하는 여러가지 방식들이 제안되어 왔고 일부는 실현되었으나 전반적으로 아직은 기술의 성숙도가
낮은 단계이다
. 이러한 시기에 본 논문은 현재 제안되고 있는 우주 폐기물 제거 방식을 소개하고 이들
이 가지고 있는 장점과 단점을 정성적으로 분석하고 있다
.
Key Words : Space Debris, Space Junk(우주 폐기물, 우주 쓰레기), Space Debris Removal(우주 쓰레
기 제거
), Space Debris Mitigation(우주 쓰레기 경감), Post Mission Disposal, PMD(임무
종료시 폐기
), Active Debris Removal, ADR(적극적인 우주 쓰레기 제거), Space Debris
Removal Satellite(청소위성), Collision(충돌), Contact-less(비접촉식)
* 최준민, 한국항공우주연구원, 위성연구본부 우주시험실
jmchoi@kari.re.kr
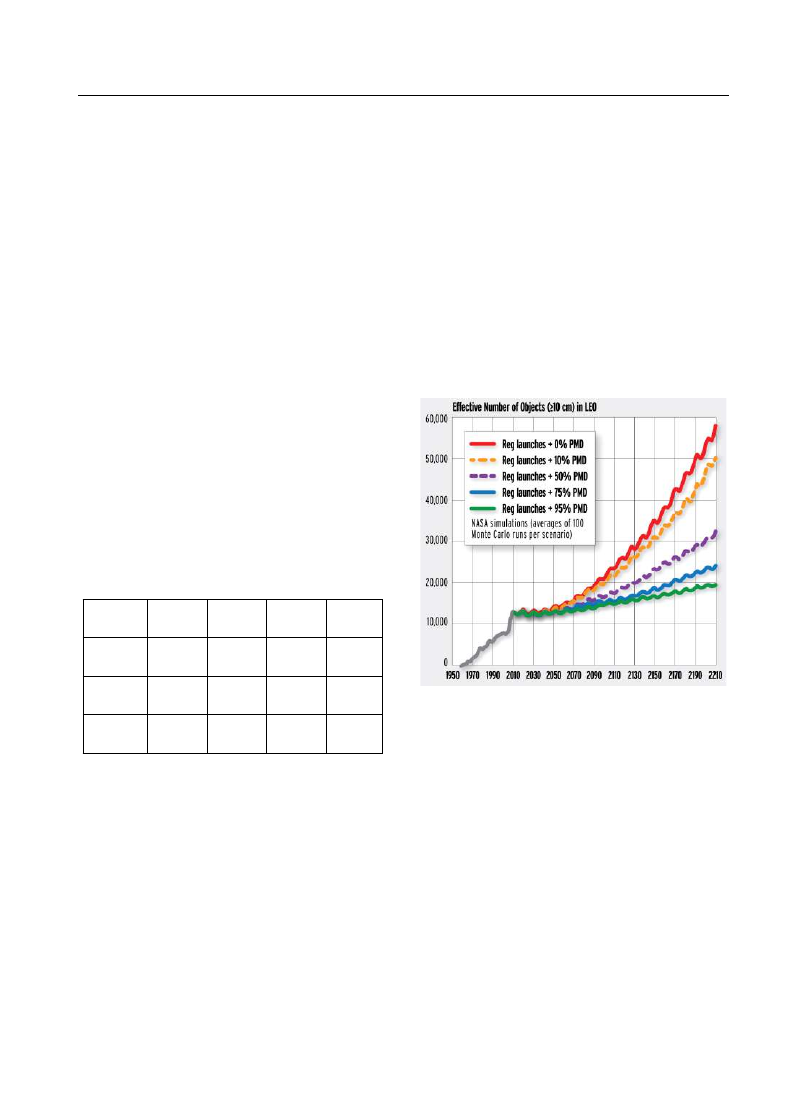
44
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
1. 서 론
우주 폐기물
(Space Debris) 또는 우주 쓰레기는
우리 인간에 의해 만들어져 우주를 이동하는 모든
활용되지 않는 물체를 의미한다
. 예로서는 고장난
위성
, 로켓 상단, 충돌 및 폭발에 의한 잔해물, 부
식이나 노후화에 의한 파편
, 우주인이 떨어뜨린 공
구 등이 있다
. 우주 쓰레기의 위험성과 관련하여
NASA 과학자 Donald J. Kessler는 지구 저궤도에
서 물체의 밀도가 어는 수준을 넘으면 물체간의
충돌은 도미노 효과를 일으켜 더 이상 인공위성을
발사할 수 없을 지경을 초래할 수 있다는
Kessler
Syndrome를 제시하였다. 우주 쓰레기가 운영 중인
인공위성과 충돌한 대표적인 사례는
2009년 2월에
발생한 고장난 러시아 통신위성 코스모스
2251호
와 미국 통신위성 이리듐
33호과의 충돌로서 <표
1>에서 보듯이 이 충돌로 10cm 이상 크기의 우주
쓰레기
1,420개와 4백만개에 가까운 1mm 이상 크
기의 우주쓰레기가 양산되었다
[1].
표
1. 충돌에 의해 생성된 우주 쓰레기 개수
등록된
파편
예측
>10cm
예측
>1cm
예측
>1mm
Cosmos
2251
1,142
840
43,220
2.22
x106
Iridium
33
490
580
30,100
1.54
x106
합계
1,632
1,420
73,320
3.76
x106
2007년 ‘유엔 외기권의 평화적 이용을 위한 위
원회
’(United Nations Committee on the Peaceful
Uses of Outer Space, UN COPOUS)는 ‘우주청 간
우주 폐기물 조정위원회
’(Inter-Agency Space Debris
Coordination Committee, IADC)가 마련한 가이드
라인을 토대로
‘우주폐기물 경감 가이드라인’을 승
인하였다
. 이 가이드라인은 비록 법적 구속력은 없
지만 우주 쓰레기의 심각성에 대하여
UN 회원국
들이 공동으로 인정하게 되는 계기가 되었다
.
<그림 1>은 저궤도에서 위성과 로켓 상단이 임
무 종료 후
25년 내에 지구 대기권에서 폐기
(Post-Mission Disposal, PMD) 되어야 하는 우주폐
기물 경감 가이드라인을 전혀 지키지 않을 때
(0%
PMD), 그리고 10%, 50%, 75%, 95% 지켰을 때 저
궤도에 존재하는 크기
10cm가 넘는 우주물체의 개
수를 연도별로 시뮬레이션 한 것이다
[2]. 위성 및
로켓 소유주가 가이드라인을
95% 지킬 경우 저궤
도에서 우주물체 개수의 증가율이 많이 완화됨을
보이고 있다
. 현재의 경우 로켓 상단이 가이드라인
을 지키는 비율은
80%이고 위성의 경우는 60%라
고 예측하고 있다
[3].
그림
1. 가이드라인(PMD) 준수율에 따른 저궤도에서
10cm 이상되는 우주 폐기물 개수의 증가
향후 우주폐기물 경감 가이드라인을 우리 모두
가 지킨다 할지라도 임무 종료시 스스로 폐기
(PMD)하는 설계나 장치 없이 이미 올라간 위성이
나 로켓 상단 그리고 운영 중에 파생된 우주 쓰레
기는 계속 위험요소로 남게 된다
. 우주 쓰레기의
속도는
7.9-11.2km이고 정면 충돌시 상대속도는 최
고
2배까지 가능하다. 현재 지구 주위의 우주쓰레
기의 무게는
6,300톤이라고 보고 있으며 이외에도
우주에서 날아오는 유성체
(Meteoroid)는 일년에
37,000-78,000톤씩 지구로 떨어지고 있다고 예측한
다
. <표 2>는 우주 쓰레기의 크기에 따른 그 운동
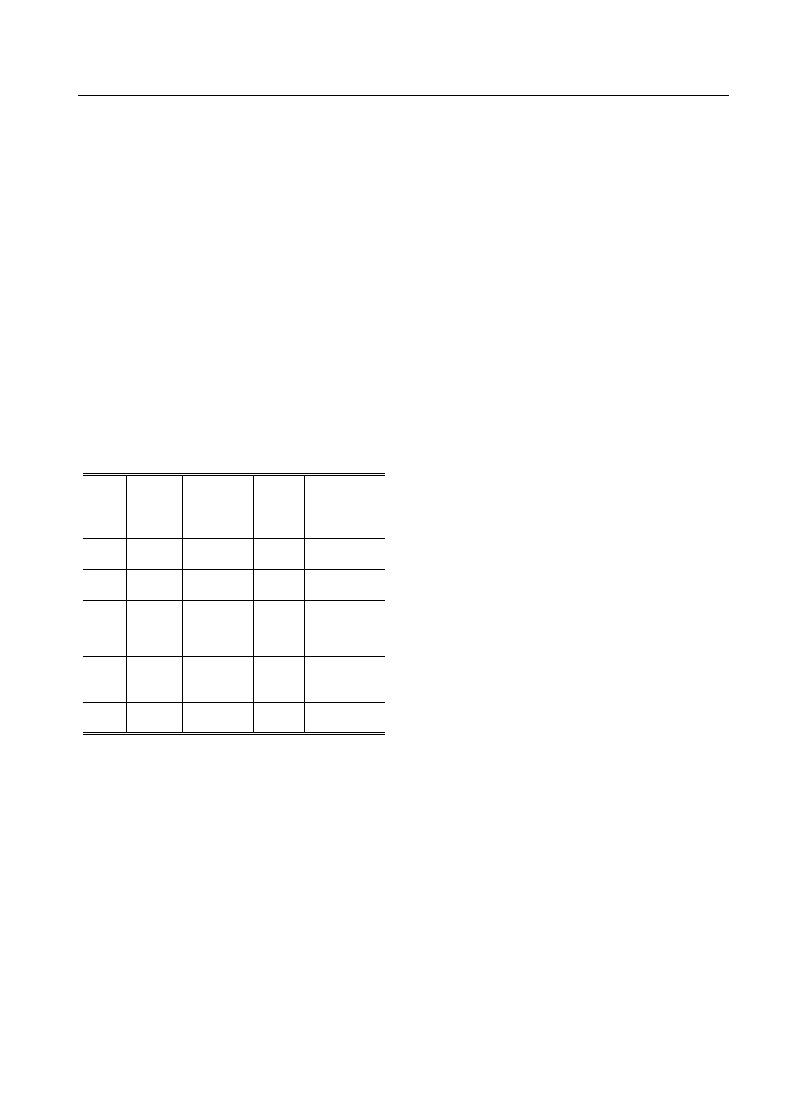
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
45
에너지를
TNT의 양과 우리가 실감할 수 있는 에
너지로 표현하였다
. 이러한 충돌 위험 때문에 국제
우주정거장
ISS의 미국 모듈은 여러 층의 방어막
으로 되어 있는
Whipple shield을 이용하여 약
1.4cm 크기의 우주 쓰레기로부터 보호를 받고 있
다
[4]. 그럼에도 불구하고 ISS의 창문 80개가 이미
교체된 상태라고 알려져 있다
[5]. 현재 미국 전략
사령부
(USSTRATCOM, US Strategic Command)
산하
합동우주운영센터
(JSpOC,
Joint
Space
Operations Center)는 지름이 10cm 이상이 되는
약
18,000개의 우주물체(위성 1,419대 포함, 실제운
용 중인 위성은
900대 추정)를 파악하고 있다. 거
리 오차는
40-50m정도 이다.
크기
(mm)
알미늄
구의
무게(g)
운동에너
지(J)
TNT
(kg)
비교
에너지
1
0.0014
71
0.0003
야구 피칭
3
0.038
1,910
0.008
총알
10
1.41
70,700
0.3
72kg 물체
100m 높이
에서 추락
50
176.7
8,840,000
37
버스와
충돌
100
1,413.7
70,700,000
300
대형 폭탄
표
2. 우주 쓰레기의 운동에너지
2007년 1월에 고도 800여 km 상공에 떠 있는
자국의 기상위성 펑윈
(풍운) 1C를 미사일로 요격
하여
10cm 이상 되는 2800여개의 우주 쓰레기를
양산하고 우주 무기 경쟁을 촉발한 것에 대하여
국제사회로부터 비난을 받은 바 있는 중국은
2016
년
6월 24일 중국의 차세대 로켓 창정(장정) 7호를
이용하여 총
7개 탑재체를 우주로 올려 보냈다. 이
탑재체 중에는 중국최초의 청소위성 아오룽
(오룡,
遨龍, ‘노는 용’이란 뜻)1호가 포함되었다. 아오룽
1호는 쓸모없는 위성 또는 대형 잔해물을 로봇팔
로 붙잡고 이후 대기권으로 진입하여 마찰열에 의
하여 연소될 계획이다
. 지구고도 200Km까지는 공
기밀도가 무시할 수 없을 정도이어서 우주 쓰레기
를 이 정도 고도까지 내려 보내면 우주 쓰레기는
공기와의 마찰열로 소멸 되거나 생존 기간이 극적
으로 줄어들게 된다
. 만약 생존할 가능성이 있는
우주 쓰레기는 궤도 계산을 통하여 잔존 물체를
바다 쪽으로 떨어지게 할 수도 있을 것이다
.
2. 우주 폐기물 제거 방식의 분류
우주 폐기물 제거 하는데 있어서 관점에 따라서
몇 가지로 분류하는 것이 향후 환경과 목적에 따
라 적합한 제거 방식을 선택하는데 도움을 줄 것
이다
. 첫째, 제거하는 주체에 따라 우주물체가 수
명이나 용도가 다 되었을 때 스스로 폐기하는
PMD(Post-Mission Disposal) 방식과 다른 주체가
우주 폐기물을 제거하는
ADR(Active Debris
Removal) 방식이 있다. 둘째, 제거 대상이 되는 개
체 수에 따라서 하나의 청소위성이 하나의 우주
폐기물을 제거하는
One to One 방식과 여러 개의
우주 폐기물을 제거할 수 있는
One to Many 방식
이 있다
. 셋째, 최종 처리 장소에 따라서는 대기권
에서 마찰열에 의하여 소각 시키는
Deorbit 방식
과 우주 폐기물을 인공위성이 사용하지 않는 궤도
로 보내는
Graveyard 방식이 있다. 넷째, 우주 폐
기물의 크기에 따라서 대형 우주 폐기물
(Large
Scale)에 적합한 방식과 소형 및 미세한 우주 폐기
물에
(Small Scale) 적합한 방식이 있다. 다섯째 우
주 폐기물을 제거할 때 우주 폐기물과 직접적인
접촉이 있는 접촉식
(Contact) 방식과 접촉이 없는
비접촉식
(Contact-less) 방식이 있다. 마지막으로 동
일한 접촉식 방식이라도 우주 폐기물을 포획한 후
밀어서 궤도를 이탈 시키는
Push형과 당겨서 궤도
를 이탈 시키는
Pull형이 있다.

46
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
3. Post Mission Disposal용 기술
가장 간단한
PMD 방식은 임무종료 시점에 우
주물체가 연료를 남겨서 자신이 가지고 있는 추력
기를 이용하여 대기권으로
Deorbit
하거나
Graveyard로 이동하는 것이다. 이것이 여의치 않
을 때 아래에 소개한
PMD용 방식을 사용하여 스
스로 폐기하게 된다
. 소개된 방식은 현재는 PMD
용에 적합하지만 우주 쓰레기에 부착하는 기술의
발전에 따라서는 향후
ADR용 기술로도 사용될 수
있을 것이다
.
3.1 태양 돛(Solar Sail)
태양 돛
(Solar Sail)은 최소 부피로 접은 상태로
인공위성이나 로켓상단에 부착시킨 다음 임무 종
료시 펼치게 된다
. 이로서 많은 항력이 유발되어
우주 쓰레기의 속도가 감소되고 더불어 궤도도 점
차 낮아지게 되어 최종적으로 대기권에서 마찰열
에 의해서 소각되어 진다
(PMD). 태양 돛은 발사하
기 전에 우주물체에 부착하는 것이 효과적이다
. 그
렇지 않고 궤도에서 우주 쓰레기에 태양 돛을 부
착하려면
(ADR) 또 다른 기술적인 도전이 필요하
다
. 2010년 NASA는 무게 4.5kg 위성에 태양빛을
흡수하는 면적
9.3m2의 Nano Sail-D를 부착하고
임무 종료시 태양 돛을 펼치어
Deorbit 기능을 검
증하는 시험을 하였다
. ESA도 Surrey 대학을 통하
여 장착시
15×15×25cm 크기에 무게 2kg 그리고
팽창시
5×5m로 확장되는 Gossamer Deorbit Sail
개발하였다
. 이 태양 돛은 700kg 위성까지 Deorbit
시킬 수 있다
[6].
그림
3. 전개 초기 Gossamer 태양 돛
3.2 풍선(Balloon)
Global Aerospace Corporation사는 저궤도에서
PMD용으로 GOLD (Gossamer Orbit Lowering
Device)라는 이름으로 거대한 풍선과 보조장치를
개발하고 있다
<그림 4>. 이 풍선은 얇게 접고 펼
수 있으며
, 팽창시 수백 배의 공기 저항을 유발 시
킨다
. 풍선의 재질이 얇아 진공인 우주환경에서 작
은 양의 가스로도 팽창이 가능하며 미세한 유성체
에 의하여 구멍이 생겨도 기체 공급장치로 쉽게
형태를 다시 유지한다
. 최악의 경우 커다란 우주
쓰레기와 충돌해도 새로운 파편 조각을 생성하지
않는다
[7]. 비교적 간단한 장치인 이 장치는 작은
상자에 담겨 위성이나 로켓상단에 장착된다
. 로켓
이 궤도를 이탈할 즈음에 풍선의 지름은
100m 정
도로 커진다
. <그림 5>는 풍선을 이용하여 공기
저항을 증가 시켜서 고도
950km을 선회하는 러시
아 로켓
SL-8의 2단에 100m 크기의 풍선을 부착시
킬 경우 질량 대 면적비가
0.015m2/kg에서
5.5m2/kg으로 늘게 되어 아무런 조치를 취하지 않
을 경우 지구 대기권에
200년 후에 진입하게 되는
것을
2년으로 획기적으로 주는 것을 보여 주고 있
다
[4]. 태양 돛을 사용할 경우에도 <그림 5>에서
예측한 것과 비슷한 효과를 볼 수 있을 것이다
. 이
방식을 궤도에서 선회하는 우주 쓰레기에 부착하
려면
(ADR) 로봇팔을 이용하는 등의 다른 기술적
그림
2. Nano Sail-D
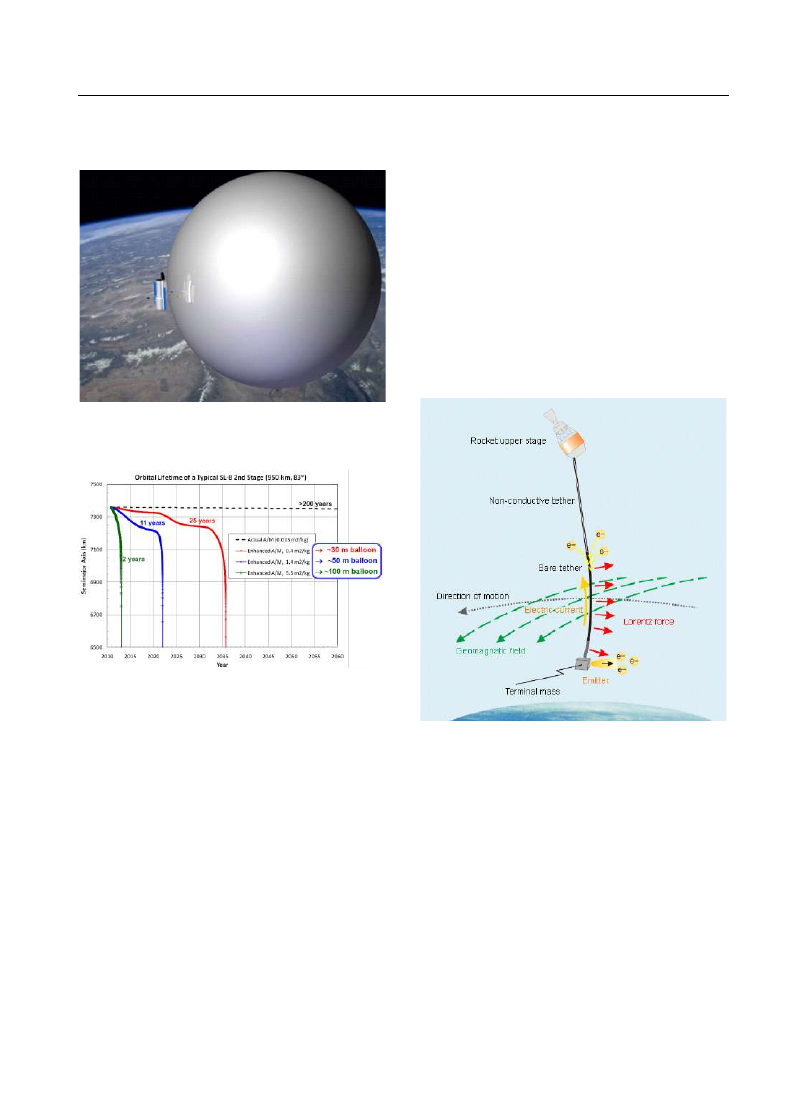
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
47
인 도전이 필요하다
.
그림
4. 우주천문위성과 Gossamer
Orbit Lowering Device(GOLD)
그림
5. 공기저항을 이용한 우주폐기물 가속 효과
3.3 밧줄(Tether)
전기력 밧줄
(Electrodynamic Tether)는 미국
Tethers Unlimited가 개발하고[8] JAXA도 개발 중
에 있다
. 임무 종료시 위성이나 발사체 상단에서
전도성 밧줄
(Tether)이 내려오게 하고 지구 주변
Plasma내의 전자를 Tether내에 흐르게 하면 지구
자기장에 의하여 힘을 발생
(로렌츠 힘)하게 된다.
이 힘은 우주 쓰레기 진행에 항력으로 작용하여
우주 쓰레기의 속도가 저하되어 고도가 낮아져 최
종적으로 대기권에서 마찰열로 소각 된다
. 그런데
이 방식은 위성이나 로켓상단에 미리 전기력 밧줄
을 부착하지 않으면 사용할 수 없어 기존 우주 쓰
레기를 처리 하는 데는 적합하지 않다
. 단점으로는
원하는 힘을 얻기 위하여서는
Tether의 길이가 수
백
m(Tether를 꼬아 놓을 경우)에서 수십 km 되
어야 한다
. 이렇게 긴 Tether는 우주 쓰레기에 의
하여 끊어 질 수 있다
. 이는 고장을 야기하는 것뿐
만 아니라 오히려 우주 쓰레기를 양산할 수 있다
.
또한 긴
Tether를 풀어주는 기계장치도 구현하기
쉽지 않다
. 한편으로 우주 쓰레기가 지구 자기장
이 형성하는 면과 평행하게 진행하게 되면 진행
방향에 수직인 힘이 발생하여 진행방향이 바뀌게
된다
.
그림
6. 전기력 밧줄의 항력 생성 원리
4. Active Debris Removal용 기술
ADR 방식은 PMD 방식 보다 기술적 난이도나
비용면에서 불리하다
. 특히 ADR 방식은 많은 경
우 청소위성이 우주 쓰레기에 근접 가능한 상태가
되도록 위치
, 속도, 각속도를 조정하는 랑데부
(Rendezvous) 기술이 기본으로 필요하다. 특히 접
촉식
(Contact) 방식을 채택할 경우에는 우주 쓰레
기의 자세와 비정상적인 회전
(Tumbling)까지 고려
하여 포획하여야 한다
. 만일 비우호적으로 운동하
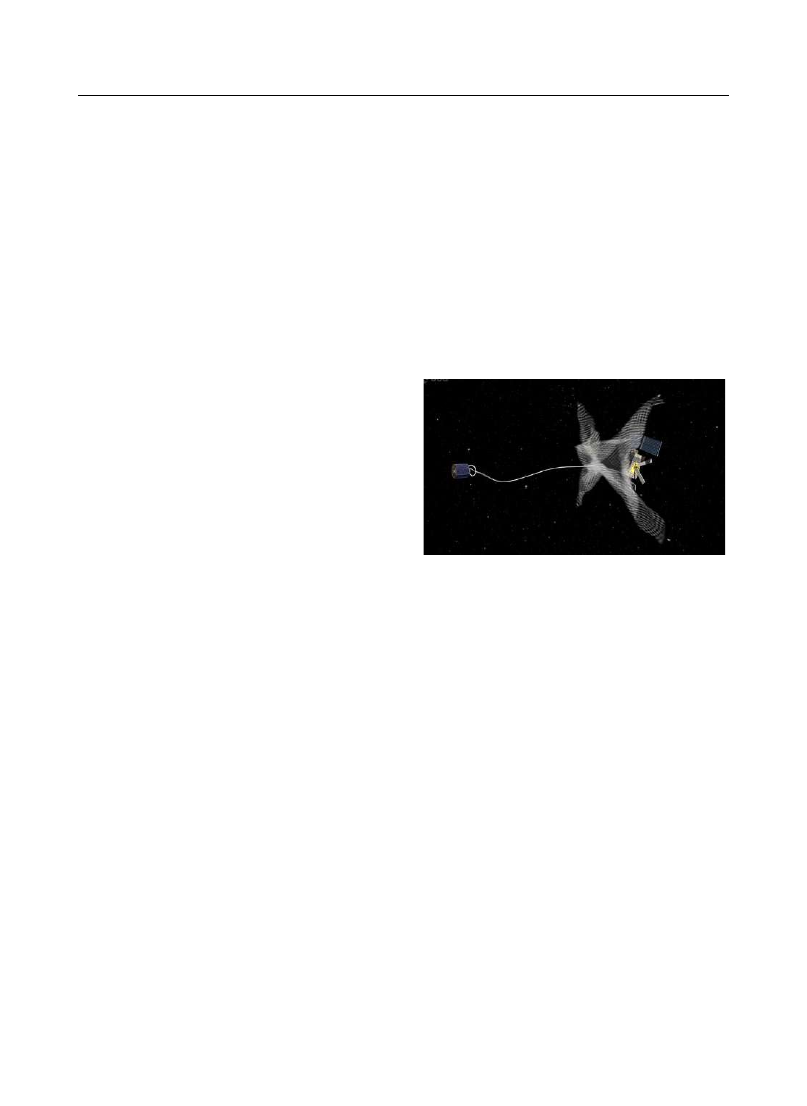
48
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
는 우주 쓰레기를 정확하게 포획하지 못할 경우
충돌에 의하여 오히려 우주 쓰레기를 양산하게 된
다
. 일반적으로 접촉식(Contact) 방식은 우주 쓰레
기를 지구 대기권으로 진입
(Deorbit)시키거나 원하
는 장소
(Graveyard Orbit)로 옮기는데 있어서 비접
촉식
(Contact-less) 방식보다 조정 능력이 우수하다.
우주 쓰레기를 제거하는 개수에 있어서는 가능
하다면
One to Many를 선호하겠지만 대형 우주
쓰레기를 제거 하는 데에는
One to One 방식도
불리하지 않을 것이다
. One to Many 경우도 임의
의 고도와 위치에 있는 여러 개의 우주 쓰레기를
찾아가고 제거하기 위하여서 많은 양의 연료가 필
요하게 된다
.
우주쓰레기를 제거하는 우선순위로는 대형 크기
로서 충돌시 우주환경에 가장 큰 영향력을 가진
것
, 충돌 가능성이 큰 물체(우주쓰레기 밀집지역,
주로 고도
800-1,200km의 극궤도에 존재하는 물
체
), 높은 고도에 위치하여 오랜 기간 남아 있을
것을 선택하여야 한다
. ESA는 안정적인 환경을 위
하여 일년에 적어도
5-10개의 물체를 인위적으로
제거하는
(ADR) 것을 제안하고 있다[9]. 다른 연구
에서도 새로이 올라간 우주물체의
90%가 임무 종
료 후 스스로 폐기
(PMD)하면서 매년 5개의 우주
쓰레기를 인위적으로 제거
(ADR)하면 200년간 안
정적인 궤도환경을 유지할 수 있다고 보고 있다
[4].
4.1 그물(Net)
ESA에서 좋은 평가를 받고 있는 방식으로 비우
호적으로 회전
(Tumbling)하는 중대형 우주 쓰레기
를 포획하는데 효과적으로 보인다
. ESA에서는 지
구정지궤도에서 선회하고 있는 쓸모없는 위성을
제거하기 위하여
RObotic GEostationary orbit
Restorer(ROGER) 연구를 수행하고 있다. ROGER
는 대형 우주쓰레기에 접근하여 그물
(Net)을 던지
든지 붐
(Boom), 촉수(Tentacle) 등으로 우주쓰레기
를 포획하여 우주무덤
(Graveyard orbit)으로 견인
(Pull)하는 개념이다[10]. 청소위성이 우주 쓰레기
를 견인
(Pull)하게 됨으로써 추력기의 화염이 그물
과 밧줄
(Tether)로 향하기 때문에 열에 강한 물질
을 사용하여야 한다
. 그물을 던져 포획하는 순간에
그물 끝에 달린
Corner Mass와 우주 쓰레기가 충
돌할 경우에는 파편이 발생될 가능성이 존재한다
.
포획 개수 관점에 청소위성이 큰 규모일 경우 여
러 개의 그물을 싣고 하나의 우주 쓰레기를 포획
한 후 원하는 장소로 견인
(Pull)한 후에 밧줄
(Tether)을 끊게 되면 One to Many 방식으로 이용
할 수 있다
.
그림
7. 그물을 이용한 포획 장면
4.2 작살(Harpoon)
ESA에서 선호하는 방식으로 그물과 같이 우주
쓰레기가 어떠한 형태
, 자세, 회전율을 가지든지
작살이
Docking 하는데 복잡하지 않다. 작살의 관
통 능력
, 관통이후 Anchor의 강도가 중요하다. 그
물과 같이 견인
(Pull)하는 방식으로 추력기의 화염
이 밧줄
(Tether)로 향하기 때문에 열에 강한 물질
을 사용하여야 한다
. 작살이 연료통이나 액체 탱크
를 관통하게 되면 누설 따른 오염
, 발화, 파편 발
생 등의 문제가 있다
. 포획 개수 관점에도 그물과
같은 개념으로
One to One 뿐만 아니라 One to
Many 방식으로 확장할 수 있다

최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
49
그림
8. 작살(Harpoon)의 개념도[11]
4.3 구속장치(Clamping Mechanism)
인간이 손으로 물건을 직접 잡는 것과 같은 가
장 상식적으로 생각할 수 있는 개념이나 청소위성
이 우주 쓰레기를 포획하는 순간에는 매우 정교한
기술이 필요하다
. 즉, 청소위성과 우주 쓰레기간의
상대 위치 및 속도를 측정하는 정밀한 센서와 위
성의 자세를 정교하게 조절하는 구동기가 필요하
다
. 이러한 난이도에도 불구하고 비교적 많은 연구
가 여러 국가에서 이루어지고 있다
. 예로서 Swiss
Federal Institute for Technology(EPFL)에서 Clean
Space One이라는 프로젝트<그림 9>를 수행 중인
데
Cubesat 크기의 우주 쓰레기를 제거 하는데 초
점을 맞추고 있다
[12]. 구속장치 방식은 비우호적
으로 움직이거나
(Tumbling) 여러 개의 부속물이
달려 있는 우주 쓰레기를 포획하는데 어려움이 있
다
. 또한 구속장치는 우주 쓰레기에 과도한 힘을
가하거나 않으면서도 우주 쓰레기가 빠져나가지
않도록 정교한 기술을 요한다
. 포획에 실패할 경우
오히려 우주 쓰레기를 양산할 수 있다
. 구속장치
형태는 우주 쓰레기의 형태에 따라 달라질 수 있
고 포획되는 우주 쓰레기는 구속장치보다 작아야
한다
. 우주 쓰레기 포획 이후에는 밀어서(Push) 우
주 쓰레기를
Deorbiting 하거나 쓰지 않는 궤도
(Graveyard Orbit)로 보내게 되는데 이는 Pull 방
식보다 수월한 면이 있다
.
그림
9. Clean Space One 프로젝트의 구속장치
4.4 팔매질(Sling)
미국
Texas A&M 대학교에서 제안한 Sling-Sat
Space Sweeper 또는 줄여서 4S라고 명명된 방식
으로 청소위성에 길게 확장될 수 있는 양팔을 대
칭되게 달고 양팔 끝에는 우주 쓰레기를 포획하는
바구니를 부착한다
. 우주 쓰레기가 한쪽 바구니에
포획되면 팔이 회전하게 되고 적당한 위치에서 우
주 쓰레기를 대기권으로 던져서 마찰열로 소각 시
킨다
[13]. 보통의 경우 One to Many로 우주 쓰레
기를 제거하는 청소위성은 하나의 우주 쓰레기를
제거한 후 다음 목표물을 찾으러 가는데 많은 연
료를 소비하게 된다
. 반면 이 방식을 이용하면 이
전에 포획한 우주 쓰레기의 운동에너지를 이용하
여 다른 장소로 옮겨 갈 수 있기 때문에 연료 소
비 면에서 유리하다고 말하고 있다
. 문제점으로는
우주 쓰레기가 초속
7.9-11.2 km이므로 청소위성도
우주 쓰레기의 접선 방향에 비슷한 각도와 속도로
움직이면서 정확하게 우주 쓰레기를 바구니에 포
획하여야 한다
. 실패시에는 바구니 파손과 우주 쓰
레기를 양산하게 된다
. 또한 물리적으로 바구니 보
다 큰 우주 쓰레기를 처리할 수 없다
.
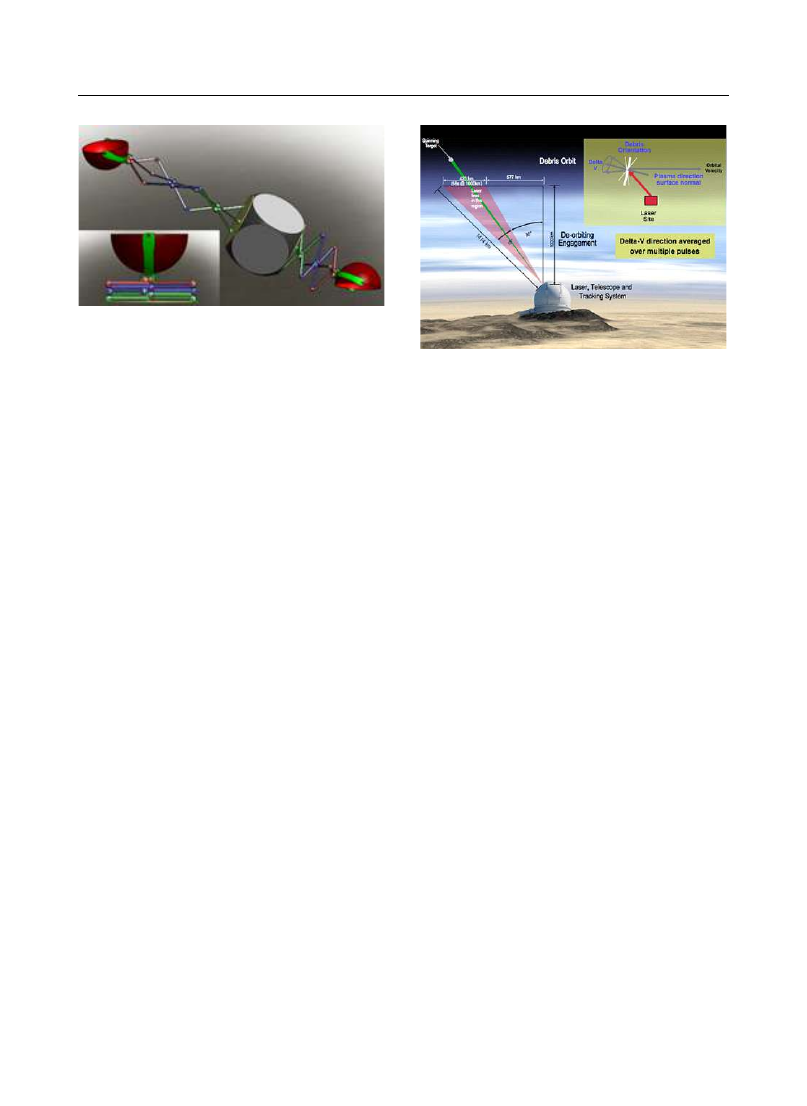
50
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
그림
10. Sling-Sat의 모식도
4.5 레이저(Laser)
우주 쓰레기의 형태나 비우호적인 운동에 관계없
이 효과적으로 적용할 수 있는 대표적인 비접촉식
(Contract-less) 방식으로 High Power LASER를 우
주 쓰레기에 조사하여 표면을 증발시킴으로써 로켓
의
Flume과 같은 효과를 발생하여 우주 쓰레기의
속도를 감속시키는 원리이다
. High Power Laser에
대하여서는 우주 무기 개발 관점에서 미국과 러시
아가 오랜 기간 연구한 바 있다
. 최근 들어서 일본
RIKEN
(Rikagaku
Kenkyusho)
과학자들은
Coherent Amplification Network(CAN) 레이저를
연구 중에 있다
. 초당 10,000 펄스(각 펄스는 100억
분의
1초 진행)로 발사하는 100,000watt 자외선
CAM 레이저를 이용하여 100km 떨어진 우주 쓰레
기를 제거하는 구상하고 있다
[14]. RIKEN은 초당
50,000펄스로 발사하는 자외선 CAM 레이저를 사용
하게 되면
5분에 한 개의 우주 쓰레기를 제거할 것
으로 보고 고도
1000km에서부터 500km까지 한달
에
10km 씩 내려오면서 우주 쓰레기를 제거 하면
50개월 이후에는 대부분의 문제를 일으킬만한 우주
쓰레기를 제거할 수 있다고 예상하고 있다
.
항공기나 우주에서 발사 되는 레이저는 아직은
매우 고가이다
. 지상에서 발사 되는 레이저는 먼거
리에 의한 초점의 퍼짐 현상과 대기권에 의한 흡
수로 인하여 레이저 빔이 약화되는 약점이 있다
.
이 방식은 대형 보다 상대적으로 작은 우주 쓰레
기를
Deorbit 시키는데 매우 효과적일 것으로 보
인다
. High Power Laser는 비접촉식이 가지고 있
는 많은 장점에도 불구하고
, 운영 중인 대형위성의
중요 센서들을 흔적 없이 공격하는
ASAT
(Anti-Satellite) 무기로 전용될 수 있으므로 정치적
인 문제를 야기할 수 있는 방식이다
. 비접촉식이므
로 접촉식보다는 우주 쓰레기를 원하는 장소로
Deorbit 하는데 조정 능력이 떨어진다.
4.6 지구자기력(Electromagnetic Deflection)
비접촉식 방식으로 소형이나 중형 크기의 우주
쓰레기 제거에 적합한 방법으로 작동원리는 우주
쓰레기에 전자빔을 쏘여 충전시키면 지구자기장
속을 전하가 운동하는 셈이 되어 로렌츠 힘이 발
생한다
. 자기장의 방향과 전하(우주 쓰레기)의 방
향이
<그림 12>와 같게 되면 로렌츠 힘이 지구 쪽
으로 생겨 비록 합성된 속도는 증가하게 되나 근
지점
(Perigee)이 낮아서 우주 쓰레기의 궤도 수명
이 줄어들게 된다
. 이 방식은 새로운 기술개발이
필요 없고
High Power 레이저 보다 훨씬 저렴한
장점을 가지고 있지만 우주 쓰레기가
<그림 12>에
서 표현된 방향과 반대 방향으로 돌면 오히려 고
도를 높이는 결과를 초래한다
. 또한 지구자기장 방
향과 같은 평면으로 우주 쓰레기가 돌게 되면 로
렌츠 힘이 거의 발생하지 않게 된다
. 즉 지구 자기
장이 남쪽에서 북쪽으로 향하므로 우주 쓰레기가
가장 밀집된 극궤도에서 효과적이지 않다
. 기술적
으로는 전자빔도 지구자기장에 의하여 방향을 바
그림
11. 레이저를 이용한 우주 쓰레기 제거 모식도
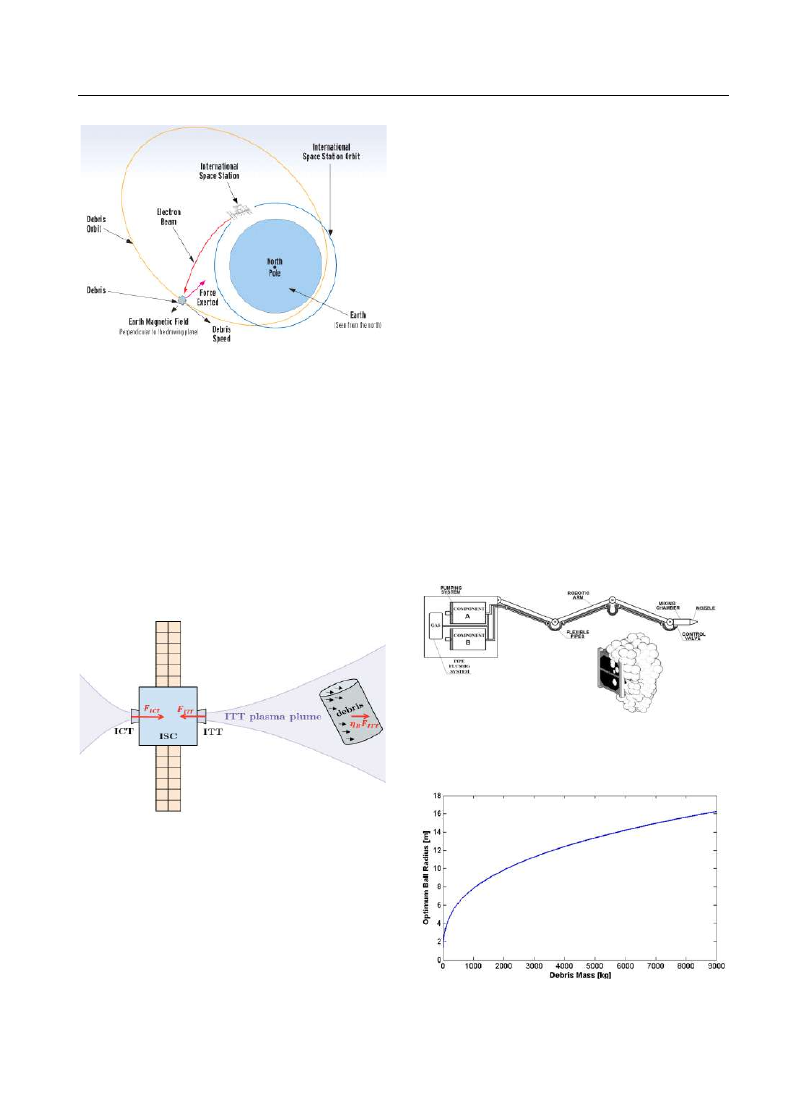
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
51
뀌므로 목표물을 정확하게 맞추기가 어렵고 우주
쓰레기가 전자빔에 의하여 충전이 되어야 적용할
수 있다
. 또한 이온화된 입자들을 가지고 있는 태
양풍을 맞게 되면 우주 쓰레기는 충전된 전하를
잃게 될 수 있다
[15]. 스페인 Madrid 대학교에서는
<그림 13>과 같이 전기추력기를 사용하여 우주 쓰
레기를 충전시키는
Ion Beam Shepherd라는 이름
으로 이 방식을 제안하였다
[16].
그림
13. Ion Beam Shepherd 작동 모식도
4.7 거품(Foam)
Polymer 계열의 거품을 우주 쓰레기에 분사하
고 거품이 팽창하여 구형 형태가 형성되도록 하는
방식이다
. 이로서 무게 대 면적비가 커지게 되고
과도한 항력을 유발시킴으로써 우주 쓰레기를
Deorbit 시키는 방식이다. PMD용 방식에서 언급
한 태양 돛이나 풍선 방식과 같은 원리이다
. 비접
촉식 방식으로 우주 쓰레기 제거 개수에 있어서
One to Many가 가능한 방식이다. 거품은 일상생
활에서 배관 단열재로 쓰이는 우레탄 폼
(Poly-
Urethane Foam)처럼 팽창하여 구형의 고체로 굳
어지게 된다
. 장점으로는 <그림 14>와 같이 로봇
팔을 이용하여 적정한 거리에서 거품을 발사하게
되면 우주 쓰레기에 충격을 가하지 않아 파손 되
는 일은 없을 것이다
. 사용되는 거품은 처음 부피
에
1000배까지 팽창이 가능하다고 보고하고 있다
[17]. 단점으로는 우주 쓰레기를 감싸는 구형의 거
품을 만드는 것이 쉬운 작업은 아니다
. 또한 거품
이 불완전하게 우주 쓰레기에 접착되어 있을 수
있고
, 진공상태에서 거품이 완벽하게 팽창하지 않
는 경우도 고려하여야 한다
. <그림 15>는 우주 쓰
레기 질량 대 최적의 거품 반지름을 계산한 결과
이지만 현실적으로 이 방식은
1,000kg 또는 더 작
은 대상에게 효과적이다
[5].
그림
15. 우주 쓰레기 질량 대 최적 거품 반지름
그림
12. 지구자기력 방식의 모식도
그림
14. 로봇팔에 달린 Foam 방출 노즐과 Space
Debris에 형성 중인 Foam[5]

52
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
4.8 인공대기(Artificial Atmosphere)
비접촉 방식으로 성층권에서 기체를 폭발시키거
나
Vortex generator를 사용하여 우주 쓰레기가 지
나가는 지역에 인공 대기
(Artificial Atmosphere)을
만들어 우주 쓰레기의 속도를 낮추어 최종적으로
대기권에서 마찰열로 소각 시키는 방식이다
[18,
19]. 규모가 큰 우주 쓰레기 보다 규모가 작은 우
주 쓰레기 제거에 효과적으로 보인다
. 단점으로 우
주 쓰레기가 가장 문제가 되는 고도
500-1000km까
지 인공 대기가 도달 하더라도 오랜 기간 담아 둘
수 없다
. 또한 우주 쓰레기의 속도가 초속 11km이
상의 속도로 비행하기 때문에 적어도 직경 수백
Km 이상의 인공대기가 만들어져야 우주 쓰레기
속도를 낮추는데 영향을 미칠 것으로 보인다
.
4.9 기타 방식
본 논문에서 언급한 방식 이외에도 여러 가지
방식이 현재 개발되고 제안되고 있다
. 한 예로
2018년 발사를 목표로 싱가폴 소재의 창업기업
Astroscale은 자체 개발한 끈끈이(Flypaper)를 부착
하여 우주에서 시험할 무게
120kg의 위성을 개발
하고 있다
[20]. JAXA는 자기장을 생성하는 그물을
만들어 작은 크기의 우주 쓰레기를 끌어 들이고
충분히 쌓이게 되면 서서히 대기권으로 내려와 소
각되는 방식을
2019년 발사를 목표로 개발 중이다
[21].
그림
17. 끈끈이가 부착된 위성
그림
18. JAXA의 시험용 자기장 그물
5. 맺 음
우주 폐기물의 심각성을 인지하면서 이것을 제
거하는 방식에 대하여 고찰하였다
. 국내에서도 이
와 관련된 연구가 수년 전부터 시작되었다
[22, 23,
24, 25]. 선행연구에서 다루었던 주제에 대하여, 본
논문은 우주폐기물에 대한 일반 관심자 부터 정
책 결정권자가 우주 폐기물을 제거하는데 있어서
향후 환경과 목적에 따라 적합한 제거 방식을 선
택하는데 도움을 주기 위하여 우주 폐기물 제거
방식을 다음과 같이 분류하여 논하였다
. 우주 폐기
물을 제거하는 주체에 따라서
PMD용과 ADR용
방식으로
, 제거 대상의 개체 수에 따라서 One to
One과 One to Many 방식으로, 처리 장소에 따라
그림
16. 인공대기를 이용한 ADR 모식도

최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
53
서
Deorbit과 Graveyard 방식으로, 우주 폐기물의
크기에 따라서 대형과 소형으로
, 포획 방법에 따라
접촉식과 비접촉식으로
, 진행 방향에 따라 Push형
과
Pull형으로 분류를 하면서 현재까지 제안되고
있는 우주 폐기물 처리 방식의 장단점을 정성적으
로 소개하였다
. 우주 폐기물을 제거하는 기술은 근
본적으로 우주에서의 평화적인 활동을 위하여 개
발되고 사용될 것이지만 경우에 따라서는 상대국
의 위성을 파괴하는
ASAT(Anti-Satellite)으로도 변
형될 수 있는 양면성을 가진 기술이다
. 따라서 이
에 대한 준비도 필요할 것으로 보여진다
. 끝으로
지면 관계상 본 논문에서 언급하지 못한 여러 가
지 방식의 우주 폐기물 제거 방식이 아직 많이 있
을 것으로 예상이 되나 이들이 본 논문에서 언급
하였던 방식에서 획기적으로 벗어나지 않거나 아
직은 개념 단계일 것이라고 생각이 된다
.
참고문헌
1. T. Wang, “Analysis of Debris from the
Collision of the Cosmos 2251 and the Iridium
33 Satellites”, Science & Global Security, 2010
2. J. C. Liou, “Effectiveness of Satellite Post-mission
Disposal to Limit Orbital Debris Growth in Low
Earth Orbit”, NASA Technical Report
20150003819, 2014
3. http://spacenews.com/35073orbital-debris-exper
ts-call-for-space-junk-removal-missions/
4. J. C. Liou, “Options and Challenges for Orbital
Debris Environment Remediation”, NASA
Document ID 20120003282, 2012
5. M. Andrenucci, P. Pergola, and A. Ruggiero,
“Active Removal of Space Debris, Expanding
Foam Application for Active Debris Removal”,
ESA Final Report, Contract No.
4000101449/10/NL/CBi, 2011
6. http://www.parabolicarc.com/2013/12/26/esa-
solar-sail-deorbiter/
7. http://gaerospace.com/projects/GOLD/index.h
tml
8. R. Hoyt, “RUSTER: Architecture and
Technologies for Low-Cost Remediation of the
LEO Large Debris Population”, International
Orbital Debris Removal Conference, 2009
9. B. B. Virgili and H. Krag, “Analyzing the
Criteria for a Stable Environment”,
Proceedings of Advances in the Astronautical
Sciences, August 2011
10. http://www.esa.int/Our_Activities/Space_Eng
ineering_Technology/Automation_and_Robotic
s/RObotic_GEostationary_orbit_Restorer_ROG
ER
11. J. Reed, J. Busuets, and C. White, “Grappling
System for Capturing Heavy Space Debris”,
Proceedings of the 2nd European Workshop
on Active Debris Removal, 2012
12. http://swisscube.epfl.ch/
13. J. W. Missel, “Active Space Debris Removal
Using Capture and Ejection”, Dissertation,
Texas A&M University, 2013
14. http://www.space.com/29271-space-station-
laser-cannon-orbital-debris.htm
15. http://spacenews.com/42511space-debris-mitig
ation-a-new-hope-for-a-realistic-solution/
16. R. L. Estergaard Jacobsen, “Ion Beam
Shepherd: Analysis of the Plasma Bridge
Interaction”, Bachelor Thesis, University
Carlos III Madrid, 2015
17. Fire Fighting and Fire Protection Systems
Standards, Engineering Standard for Foam
Generating and Proportioning Systems,
IPS-E-SF-140

54
최준민 / 항공우주산업기술동향 14/2 (2016) pp. 43~54
18. D. A. Gregory et al., “Space Debris Removal
Using Artificial Atmospheres”, Patent No. US
8919702 B2, U.S.A., 2014
19. D. A. Gregory et al., “Space Debris Removal
Using Upper Atmosphere and Vortex
Generator”, Patent No. US 8657235 B2,
U.S.A., 2014
20. http://motherboard.vice.com/read/this-satellit
e-uses-special-glue-to-stick-to-space-debris-like-
flypaper
21. http://www.geek.com/news/japan-will-deploy-
a-space-net-to-capture-orbiting-debris-1582324/
22. 김해동, “우주파편 연구동향”,
항공우주산업기술동향지
, 9권 2호, pp. 52-64,
2011
23. 김해동, 임성민, “우주로봇 및 위성 서비스
개발 기술
”, 항공우주산업기술동향지, 10권
1호, pp. 171-178, 2012
24. 임성민, 성재동, 김해동, “초소형위성을 이용한
우주파편 제거 연구 동향
”, 항공우주학회
춘계학술대회
, pp. 781-785, 2013
25. 김해동, 김민기, “우주파편 능동제거 기술
연구개발 동향 분석
”, 한국항공우주학회지,
43(9), pp. 845-857, 2015
항공우주산업기술동향 14권 2호 (2016) pp. 55~66
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
Transformative Vertical Flight 개발 및 기술 동향
박중용* 1)
Current Development and Technology Status of
Transformative Vertical Flight
Park, Joong-yong*
ABSTRACT
This paper describes the survey results on current development and technology status of innovative
VTOL(Vertical Take-off and Landing) incorporating advanced technology such as electrical/hybrid
propulsion and DEP(Distributed Electric Propulsion). I reviewed those papers presented at 72nd
AHS(American Helicopter Society) Forum Transformative Vertical Flight Special Session 2016. In addition
to DARPA(Defense Advanced Research Projects Agency) VTOL X-plane(Vertical Take-Off and Landing
Experiment Aircraft), NASA(National Aeronautics and Space administration) SCEPTOR(Scalable
Convergent Electric Propulsion Technology and Operations Research), DARPA ARES(Aerial
Reconfigurable Embedded System) and FVL(Future Vertical Lift)/JMR-TD(Joint Multi-Role Technology
Demonstration)/electric helicopter/manned multicopter are investigated especially in viewpoints of
program status and technical achievement.
초 록
본 논문에서는 최근 관심이 집중되고 있는
Distributed Electric Propulsion(DEP)과 같은 전기/하이브리
드 동력을 채택하는 등 혁신적인 수직이착륙기 개발 현황 및 기술 동향에 대해 정리하였다
. 2016년도 72nd
AHS Forum의 Transformative Vertical Flight 특별 세션에서 발표된 자료들을 주요 분석 대상으로 하였다.
미국
DARPA VTOL X-Plane 사업에 참여한 기업들의 연구 결과가 주를 이루나, NASA의 SCEPTOR 사업과
DARPA의 ARES 사업에 대해서도 분석하였다. 또한 FVL, JMR-TD, 전기동력 헬리콥터와 유인 멀티콥터 기
술도 소개하였다
.
Key Words : Transformative Vertical Flight, VTOL(수직이착륙기), Rotorcraft(회전익기), Distributed
Electric Propulsion(분산전기추진)
* 박중용, 한국항공우주연구원 항공연구본부 항공기술연구단 회전익기연구팀
parkjy@kari.re.kr

56
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
1. 서 론
수직이착륙기
(VTOL:
Vertical
Take-off and
Landing)는 이륙과 착륙을 위해 활주로가 필요 없을
뿐만 아니라 정지비행
(hovering)이 가능하다. 이러한
특성 때문에 고정익기가 할 수 없는 임무 수행에 수직
이착륙기가 활용되어 왔다
. VTOL은 크게 회전익기
(Rotorcraft)와 Powered lift로 나누어지며 다양한 형태
로 개발이 시도되었지만 실제로 양산되어 운용된 기체
는 헬리콥터
, 틸트로터기인 V-22 Osprey, 그리고
Harrier 군용기 정도에 불과하다.
헬리콥터는 대표적인 회전익기
(Rotorcraft)로서 일
반인들도 왜 헬리콥터가 회전익기인지 직관적으로 이
해할 수 있다
. 헬리콥터는 로터를 회전시켜서 양력과
조종력을 발생시키기 때문이다
. 그렇다면 헬리콥터를
제외한 회전익기로는 어떤 것이 있을까
?
영국의
Royal Aeronautical Society는 2013년에 발
표한 논문
“Definition of a Rotorcraft”에서 회전익기
의 정의를 제안하였다
. 이 논문은 헬리콥터 형태의 회
전익기 이외에도
X2와 X3 같은 다양한 형태의 회전익
기가 개발되면서 회전익기의 정의에 대해 논의할 필요
가 생긴 것을 연구의 배경으로 삼아 회전익기의 정의
를 다음과 같이 제안했다
[1].
- 헬리콥터 : 양력과 종방향 추력을 기체의 종방향
축에 수직이며 고정된 축을 갖는 로터 시스템에서 얻
는 회전익기
- 복합 헬리콥터(Compound Helicopter) : 저속에서
는 상당부분의 양력과 종방향 추력을 헬리콥터와 같은
로터 시스템에서 얻고
, 고속에서는 고정된 양력 발생
날개나 보조 추진체와 함께 얻는 회전익기
위의 정의를 수용한다면
X2와 X3 모두 복합 헬리콥
터로 분류됨을 알 수 있다
. 한국항공우주연구원이 개
발한 스마트무인기와 미국의
Bell사와 Boeing사가 공
동으로 개발한
V-22 Osprey와 같은 틸트로터기는 회
전익기에 포함되지 않고
VTOL의 종류인 Powered lift
에
포함된다
.
미국
FAA(Federal
Aviation
Administration)가 분류한 Powered lift에는 틸트로터
(tiltrotor), 틸트윙(tiltwing), 테일시터(tail-sitter), 팬인
윙
(fan-in-wing), 벡터드 쓰러스트(vectored thrust) 등
이 있다
.
VTOL의 최대 장점은 수직이착륙이 가능하다는 사
실이다
. 헬리콥터는 수직이착륙 기능을 활용하며 거의
100년에 가까운 운용 역사를 갖고 있다. 그러나 전진비
행속도가 느리다는 점과 안전성에 대한 우려 때문에
대안으로서 복합 헬리콥터나
Powered lift에 대한 연
구가 꾸준히 진행되어 왔다
. 과거 기술 부족으로 성과
를 보지 못했던 다양한 형태의
Powered lift에 대한 연
구가 최근 들어 활성화되고 있다
. 특히 전기를 동력원
으로 하는 항공기에 대한 관심이 집중되면서 과거와는
차별화된
VTOL 개발이 진행되고 있다. 이러한 흐름
속에서
AHS(American
Helicopter
Society)는
Transformative Vertical Flight Concepts Initiative를
출범하고
2014년에 첫 번째 워크숍을 개최했다. 이 그
룹의 목적은 전기
/하이브리드 동력이나 distributed
propulsion과 같이 향후 떠오르는 수직이착륙 기술에
대한 예비 로드맵을 개발하는데 있다
[2]. 2016년 9월
29일부터 30일까지 미국에서 세 번째 워크숍이 개최되
었고
, 2016년 5월 19일 72번째 AHS 포럼에서도 특별
세션을 개최하여
Transformative Vertical Flight 개발
현황에 대해 발표하고 토론하였다
. 본 논문은 72번째
AHS 포럼에서 발표된 자료들을 토대로 하여
Transformative Vertical Flight 개발과 기술 동향을 정
리 및 분석하였다
.
2. 관련 계획 및 사업
2.1 FVL과 JMR-TD
FVL(Future Vertical Lift)은 미국 육군이 현재 사용
중인 헬리콥터들을 장기적으로 교체하려는 계획이다
.
즉 현재의 주력기인
AH-64, UH-60, CH-47 등의 헬리
콥터를
2020년대 중반까지 개조하는 사업을 진행시키
고 이후 이들을 대체할
VTOL을 개발하려는 계획이
FVL이다. Light, Medium-Light, Medium, Heavy,
Ultra와 같이 모두 5가지 급의 VTOL을 개발 예정이나
FVL은 확정된 사업이 아닌 장기적인 계획이므로 처음
수립 이후로 지속적으로 수정되고 있다
. 총 4천여대의
VTOL을 획득하려는 계획으로 그림 1은 2016년 시점
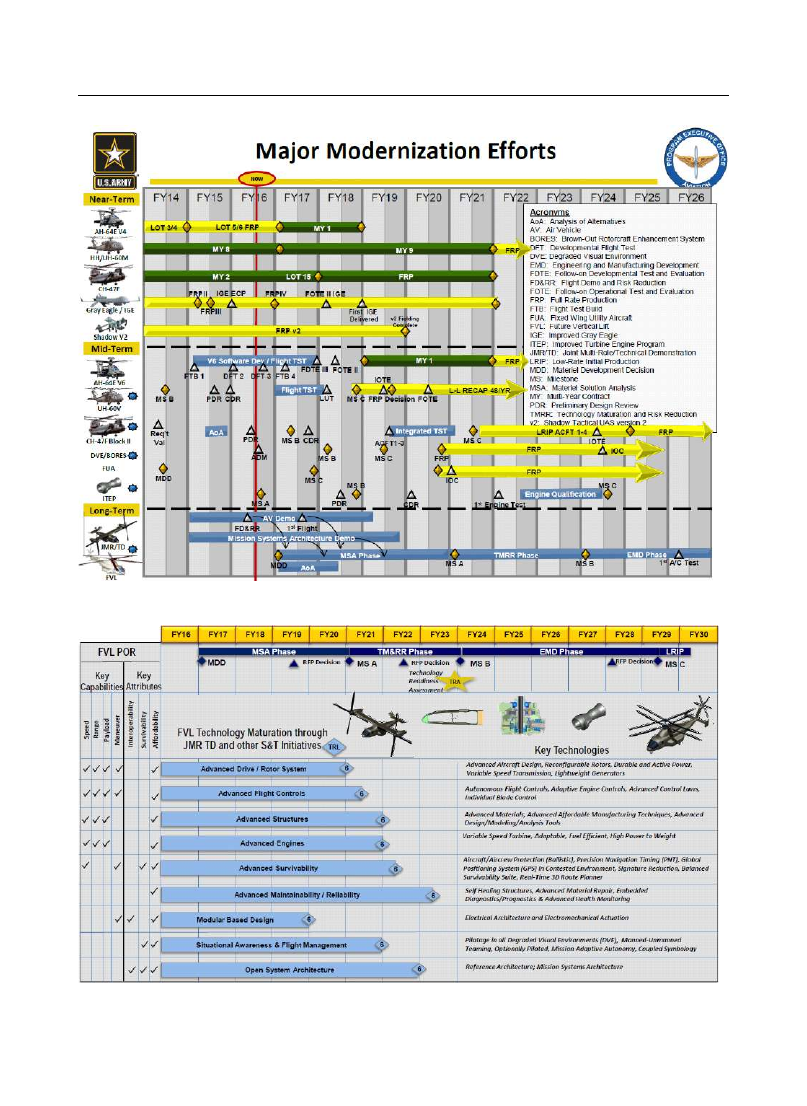
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
57
그림
1. 미국 육군의 회전익기 현대화 주요 계획[3]
그림
2. FVL을 통해 획득하려는 핵심 기술[4]
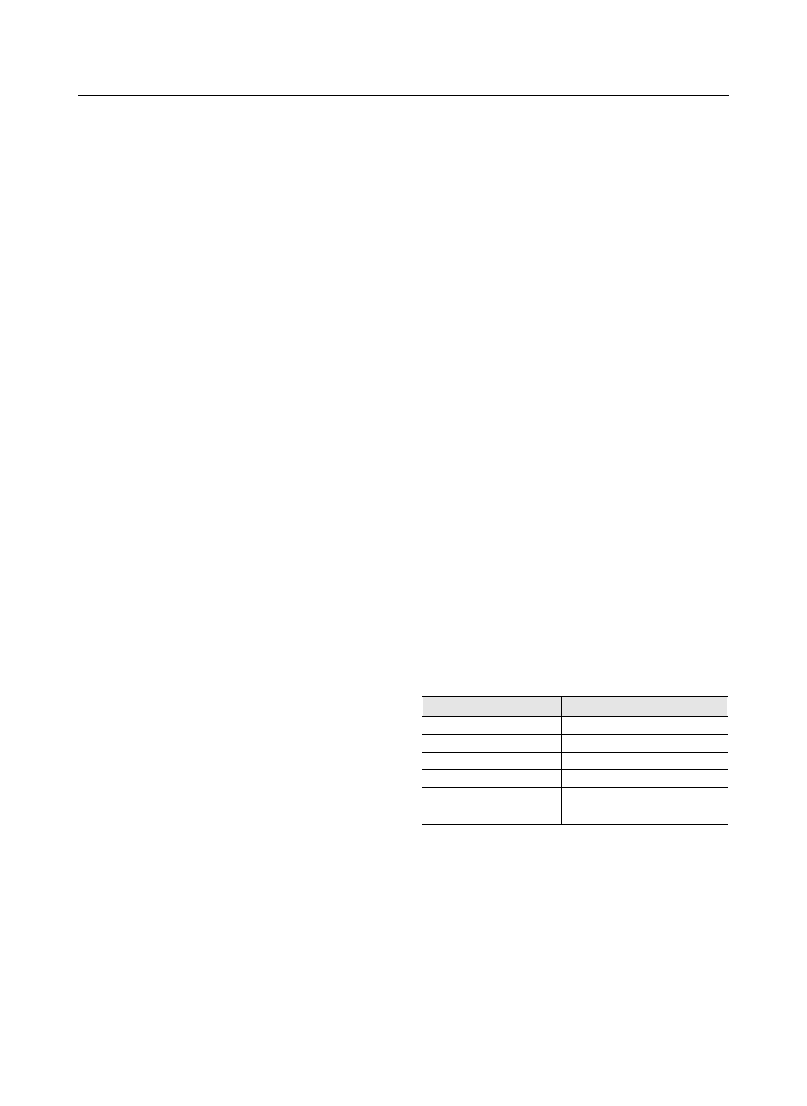
58
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
에서의
FVL 일정이다[3]. FVL 계획을 완수하기 위해
필요한
기술들은
JMR-TD(Joint
Multi-Role
Technology Demonstration)나 기타 Science &
Technology initiatives를 통해 2024년까지 개발할 예
정이다
. 주요 기술 분야는 그림 2와 같이 구동/로터 시
스템
, 비행 조종, 구조, 엔진, 생존성, 정비성/신뢰성,
모듈 기반 설계
, 상황인식&항행관리, 그리고 개방형
시스템 아키텍쳐 분야이다
[4]. 그 중에서 FVL의 일환
으로
Improved Turbine Engine Program(ITEP)이 착
수되어
UH-60에 사용된 GE사의 2000마력급 T700 엔
진을 대체할
3000마력급 새로운 엔진을 2024년까지
개발하려 한다
.
JMR-TD는 FVL과는 독립된 프로그램으로서 FVL
의 시행 전에
Medium 급, 즉 AH-64와 UH-60을 대체
할
VTOL의 기술적 가능성을 미리 점검해보는 목적을
가지고 있다
. JMR은 두 단계로 진행되는데 첫 단계에
서는 비행체
, 두 번째 단계에서는 임무 시스템을 개발
한다
. 비행체 개발에는 당초 네 개의 팀이 제안서를 제
출했으며
, 이 중에서 Karem사와 AVX사가 탈락하고
현재는
Bell사와 Sikorsky/Boeing사 두 개의 팀이 남
아 경쟁을 벌이고 있다
. Karem사는 최적회전속도 틸
트로터기
(OSTR: Optimum-Speed Tiltrotor) TR-36을
제안했고
, AVX사는 동축반전로터와 덕티드 팬이 장
착된 형상을제안한 바 있다
. 두 회사는 비록 JMR-TD
에서 비행체의 비행시험까지 수행하는 단계에서는 선
정 받지 못했지만
, AVX사는 자사가 제안한 모델에 대
해
1/10 스케일 풍동시험을 수행할 수 있는 자금을 지
원받고 있고
Karem사는 스와쉬 플레이트 대신 전기기
계적 작동기를 사용하는 혁신적인 로터 허브 제작과
시험을 지원받고 있다
[5]. 또한 각사가 제안했었던 개
념의
VTOL을 바탕으로 DARPA VTOL X-Plane이나
ARES(Aerial Reconfigurable Embedded System) 프
로그램에도 도전했다
.
현재
JMR-TD 사업에 참여 중인 두 팀 중 하나인
Bell사는 V-22 개발 경험을 바탕으로 V-22보다 크기가
작은 틸트로터기
V-280 Valor를 제안했다. Valor의 전
진비행속도는 약
519km/h이고 승무원 4명과 부대원
14명을 태울 수 있는 등 유상하중은 5,443kg에 이른다.
이동거리는 최대
1,480km이며 2017년에 최초비행을
계획하고 있다
[6]. Sikorsky사와 Boeing사가 제안한
기종은
X2와 같은 형태의 동축반전로터기 SB>1
Defiant이다. Defiant는 463km/h의 전진비행속도를
달성할 것으로 예상되며
UH-60보다 약간 큰 객실에
12명의 부대원을 태울 수 있다. Defiant 역시 2017년이
나
2018년에 최초비행 계획이다[5].
JMR-TD는 기존 헬리콥터보다는 전진비행속도가
빨라야 하나
, 복합 헬리콥터가 감당할 수 있는 범위 내
로 요구사항을 제안함으로써 미국이 수십 년 전부터
상용화를 위해 노력해온 복합 헬리콥터와
V-22로 상
용화된 틸트로터기를
FVL의 후보로서 서로 경쟁토록
하고 있다
.
2.2 DARPA VTOL X-Plane
주로 첨단 기술을 개발하는 프로젝트를 수행하는
것으로 유명한 미국의
DARPA(Defense Advanced
Research Projects Agency)는 일반적인 회전익기보다
빨리 날 수 있으면서 수직이착륙이 가능한 혁신적인
VTOL 개발을 위해 VTOL X-Plane(Vertical Take-Off
and Landing Experiment Aircraft) BAA(Broad
Agency Announcement)를 2013년 2월에 발표했다.
DARPA가 제시한 성능 요구사항은 다음 표와 같다.
주요 요구사항 항목
주요 요구사항 내용
최대전진속도
555.6km/h~740.8km/h
양항비
(양력/항력)
10 이상
총이륙중량
4.5톤~5.4톤
유용하중
40% 이상
정지비행효율
(Figure of Merit)
75% 이상
표
1. VTOL X-Plane 성능 요구사항 [7]
SB>1 Defiant(463km/h)와 같은 복합 헬리콥터는
최대전진속도 요구사항을 충족할 수 없음을 알 수 있
으며 지금까지 개발된 틸트로터기인
V-22(509km/h)
나
Valor(519km/h)로도 충족하기 어렵다. 따라서
X-Plane 프로젝트는 최대전진속도 요구사항만으로도
혁신적인
VTOL을 원하고 있음을 알 수 있다. 전진비
행 속도를 충족하려면 전진비행 시에는 고정익기과 같
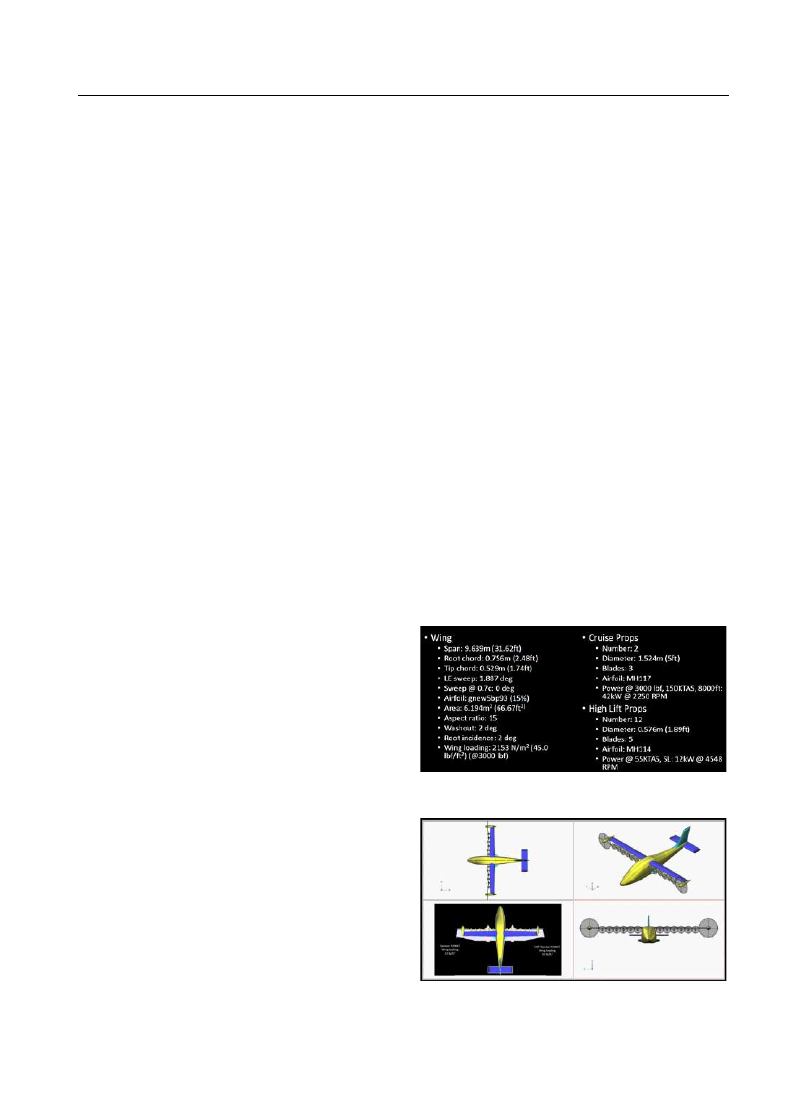
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
59
은 형태의 비행을 하되
, 수직이착륙이 가능한
powered lift 계열이 될 수밖에 없다.
X-Plane 프로젝트는 3단계로 진행 중이다. 첫 번째
단계는 예비설계 단계로서
2014년부터 약 2년간
Sikorsky, Aurora Flight Sciences, Boeing, Karem 네
개의 회사가 참여하여 경쟁을 벌였다
. 그 결과, 2016년
3월에 설계와 제작, 통합이 이루어지는 2단계에
Aurora Flight Sciences사가 선정되었다. 3단계는 2단
계 후 약
1년여에 걸쳐 비행시험을 수행할 예정이다. 1
단계에서 경쟁을 벌인 네 개 회사의
VTOL을 포함하여
최신
VTOL 기술 개발 현황을 다음 장에서 소개하였다.
3. 주요 기술 개발 현황
3.1 SCEPTOR
SCEPTOR(Scalable Convergent Electric Propulsion
Technology and Operations Research)는 미국의
NASA가 진행 중인 프로젝트이다. 이 프로젝트는 이
태리의 쌍발기인
Tecnam P2006T를 개조해서 14개의
전기모터로 구동되는 프로펠러를 장착함으로써 분산
전기추진
(DEP: Distributed Electric Propulsion) 기술
의 가능성을 시험해보는 것이 목적이다
. SCEPTOR는
VTOL이 아니지만 이 프로젝트에서 개발하고자 하는
주요 기술이
DEP 기술로서 Transformative Vertical
Flight Concepts Initiative의 목적에 부합되어 관련 세
션이나 워크숍에서 현황이 발표되고 있다
.
NASA는 전기 추진의 장점으로 모터의 중량 대비
파워가 엔진에 비해 최대
6배이고 모터 효율이 최신 엔
진에 비해
2~4배에 이르며, 효율이 모터 크기에 상관
없이 거의 일정한 특성인
scale-free efficiency를 주장
했다
. 또한 연속적으로 변화가 가능한 트랜스미션과
탄소 등 유해한 가스 배출이 전혀 없다는 점도 강조했
다
. 엔진에 비해 간결하고 안전하며 조용할 뿐 아니라
에너지 비용도 파격적으로 낮다고 주장했다
. 그러나
전기 추진의 단점으로 에너지 저장을 위한 무게와 비
용이 크고 아직 인증 절차가 확립되지 않았음을 꼽았
다
[8].
분산추진은 소수의 대형 추진장치를 다수의 소형
추진장치로 나누어 기체에 분산 배치하는 방식으로 효
율 향상과 더불어 항공기의 소음을 낮출 수 있다
. 이는
항공기 추진시스템의 근본적인 변화를 도모하려는 경
향으로 보인다
[9]. 전기 추진은 scale-free efficiency 특
성 때문에 특히 분산추진에 적합하다
. DEP를 항공기
의 추진장치로 선택함으로써 항공기 설계의 자유도가
높아지고 새로운 방법으로 조종
, 소음 등과 정밀하게
상호작용을 할 수 있게 만든다
. 특히 공기역학과 추진
을 강하게 연계함으로써 양력 증가 효과를 가져 올 수
도 있다
. DEP 항공기에 비행자동화 기술을 잘 접목하
면 상품성이 있는 민수용
VTOL 개발도 가능할 것이며
화성의 저밀도 대기에서 느린 속도로 움직이는 초절전
형
VTOL과 같이 지금까지 생각하지 못했던 새로운 임
무 수행도 가능하다
. 무엇보다도 DEP는 현존하거나
앞으로 형성될 항공기 시장에서 탄소 배출과 운영 비
용 측면에서 경쟁력을 가지게 될 것이다
[8].
SCEPTOR는 NASA가 ESAero, Joby Aviation과 함
께 진행 중인 프로젝트인데 주요 목표는
282km/h의
속도로 비행할 때 기본기인
Tecnam P2006T보다 1/5
의 에너지만 소비하는 것이다
. 2017년에 비행시험 예
정인 시제기를
X-57 Maxwell로 명명했다.
그림
3. X-57 Maxwel 명세[8]
그림
4. X-57 Maxwel 형상[8]
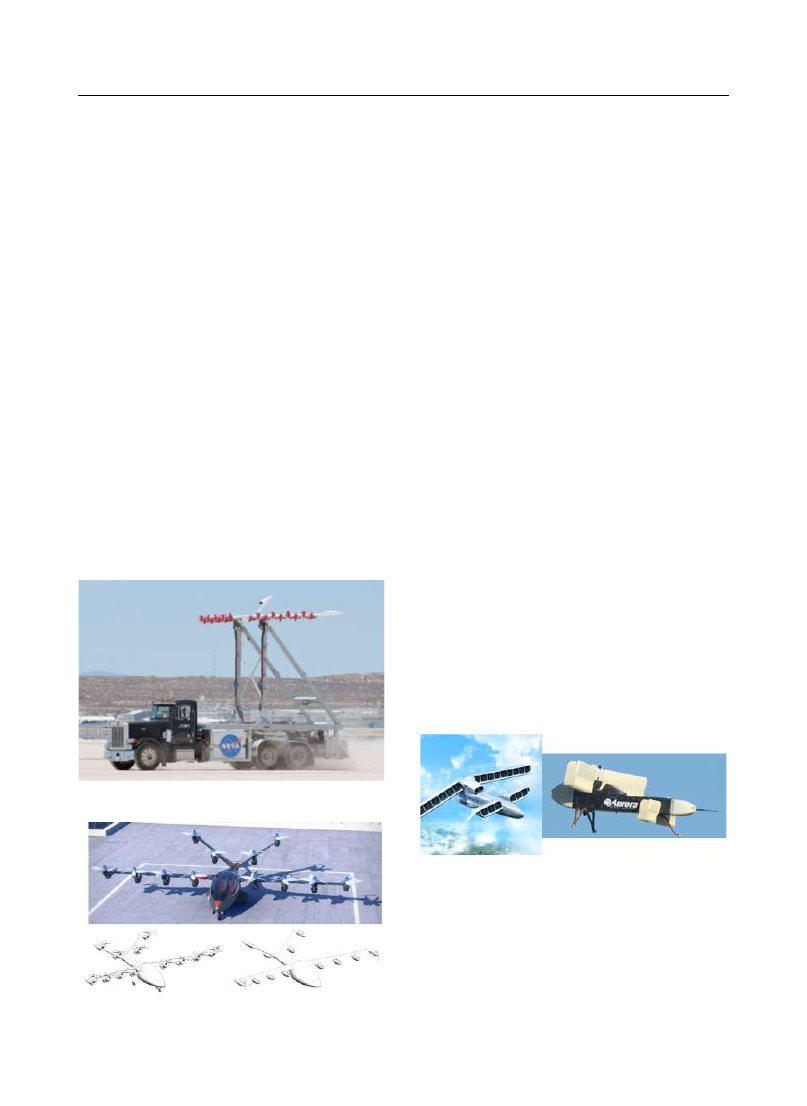
60
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
날개의 크기를 기본기에 비해 대폭 줄여서 날개 단
위면적에 걸리는 하중
(wing loading)이 2.6배로 증가
하도록 설계하였다
. 이 기술은 Joby Aviation이 주로
개발 중인
LEAP Tech(Leading Edge Asynchronous
Propellers Technology)로서 wing loading을 2배로 함
으로써 에너지 사용을
1/5로 줄이고 승객의 안락성과
돌풍 민감도를 향상시킨다
. 그림 4의 왼쪽 하단의 그림
을 보면 날개 크기가 비교되어 있다
. 순항시에는 날개
의 가장 끝에 있는
2개의 큰 프로펠러를 이용해 추력을
내고
, 이착륙시와 같이 고양력이 필요할 때는 12개의
작은 프로펠러를 활용한다
. 작은 프로펠러의 추력이
필요할지 않을 때 프로펠러를 접는 기술도 전기동력
VTOL인 S2를 연구 중인 Joby Aviation사와 함께 개발
중에 있다
. Joby Aviation사는 2009년에 미국 캘리포
니아에서 설립된 작은 회사로서 복합체 동체의 설계
및 제작
, 공력 해석, 전기모터 설계 및 제작, 전기동력
개인기 개발 등에 특화된 기술을 개발하고 있다
.
LEAP Tech, S2, 그리고 중량 125kg의 하이브리드-전
기
UAV인 LOTUS 개발 프로젝트를 진행 중에 있다.
그림
5. LEAP Tech 지상시험, 2015년[10]
그림
6. Joby Aviation의 전기동력기 S2 예상도[10]
3.2 LightningStrike
2016년 3월, 미국의 DARPA(Defense Advanced
Research Projects Agency)는 VTOL X-Plane 프로그램
의
2단계(개발)와 3단계(비행시험) 개발자로 미국 회
사인
Aurora Flight Sciences사를 선정했다. Aurora사
는
89.4백만 미국 달러를 지원받게 되었다. X-Plane 프
로그램의 목적은 혁신적인 수직이착륙기를 개발하는
것으로
556~741km/h의 전진비행속도, 정지비행 효율
75%, 순항시 양항비 10이상, 비행체 총중량 4.5~5.4톤
에 대해
40%이상의 유용하중을 요구사항으로 내걸었
다
. Aurora사가 설계한 LightningStrike는 하이브리드
동력장치를 탑재한다
. 즉, Rolls-Royce사의 AE1107C
터보샤프트 엔진을 이용해서
Honeywell International
사의
1 메가와트 급 발전기 3대를 돌려 3 메가와트의
전기를 생산하고 이 전기를 이용해
24개의 전기모터
구동 가변 피치 덕티드 팬을 돌려 양력과 추력을 발생
한다
. LightningStrike의 핵심기술은 24개의 덕티드 팬
을 잘 구동할 수 있는
DEP 기술이다. 그리고 VTOL 기
능 수행을 위해 날개와
canard를 모두 틸팅할 수 있다.
향후 효율적인 전기동력 발생 및 분배 시스템 개발과
고효율의 전진비행
/정지비행/천이비행을 위한 공기
역학적인 날개 개발 등의 기술적 난제를 풀어나가야
한다
.
Aurora사는 2016년 4월 18일,
실물
LightningStrike의 20% 크기의 축소모델을 원격조종
으로 비행하는데 성공했다
[11,12,13].
그림
7. LightningStrike 예상도(좌)와 축소모델(우)[13]
3.3 PhantomSwift
Boeing사가 DARPA VTOL X-Plane에 제안했던
VTOL로서 덕티드 팬을 4개 장착해서 추력을 얻는 시스
템이다
. 덕티드 팬 2개는 동체 내부에 장착되고 나머지
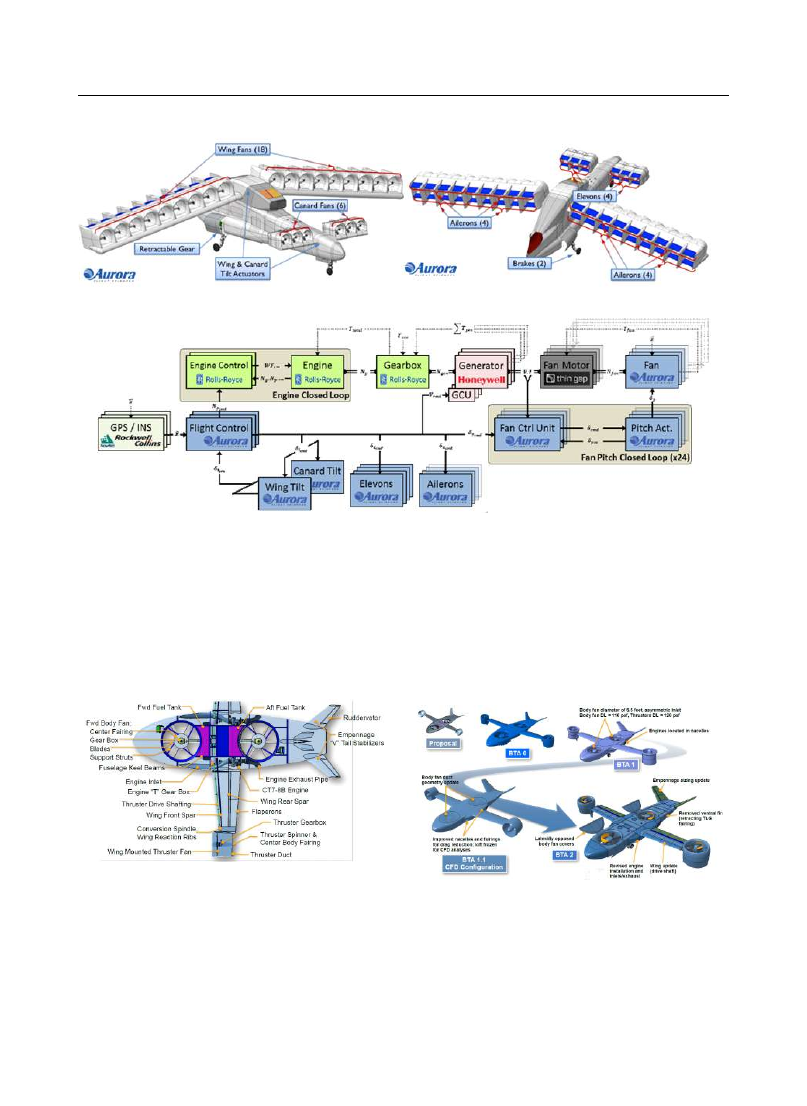
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
61
2개는 날개 끝에 장착된다. 이착륙시에는 4개의 덕티드
팬이 모두 활용되지만 전진비행 시에는 내부에 장착된
덕티드 팬은 항력을 줄이기 위해 덮개가 닫히면서 추력
을 내지 않는다
. 시제기에는 GE의 CT7-8 엔진이 사용되
었지만 최종적으로는 전기동력기를 목표로 했다
.
Boeing사는 예비설계까지 총 3단계의 과정을 거쳤
다
. 첫 번째 단계는 형상 선정으로서 DARPA의 요구
사항인 전진비행속도와 정지비행 및 순항 시 효율을
충족할 수 있는 형상을 과거
VTOL 개발 역사를 참고
하고
TRL(Technology Readiness Level) 6/7단계 기술
을 기준으로 선정했다
. 두 번째 단계는 개념설계 단계
로서 시스템 비교분석을 구동시스템 레이아웃
, 엔진
장착
, 팬 덮개, 주요 구조물, 사이징 측면에서 수행했
다
. 마지막으로 예비설계 단계에서는 지면효과 시험,
항력과 안정성 시험
, 덕티드 팬 시험 등을 통해 주요 성
능이나 기능을 검증했다
.
3.4 TR36XP
Karem사는 OSTR(Optimum-Speed Tiltrotor)을
JMR-TD 후보형상으로 제안한 바 있으나 VTOL
그림
8. LightningStrike의 비행조종시스템[13]
그림
9. PhantomSwift 내부배치[14]
그림
10. PhantomSwift 예비설계 과정[14]
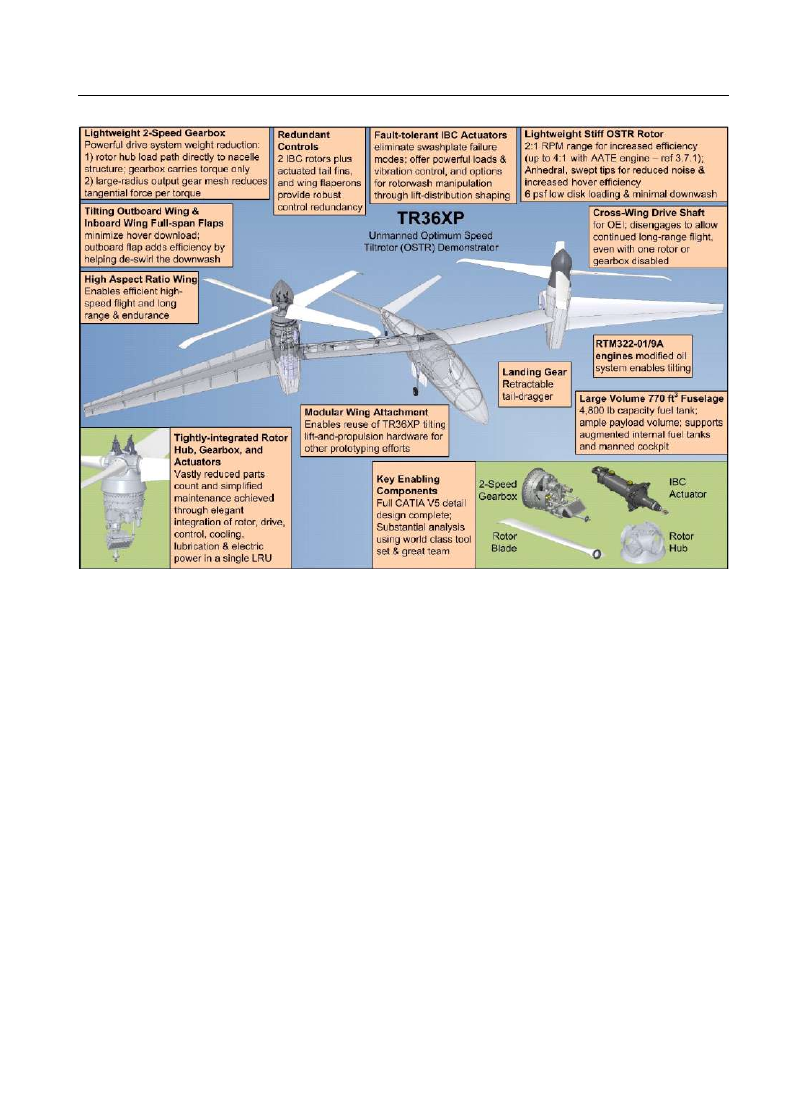
62
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
X-Plane 사업에도 같은 형상의 TR36XP를 제안하였다.
효율적인 수직이착륙 성능을 보이려면 헬리콥터와 같
이 낮은 디스크 로딩이 필요하나 효율적인 전진비행을
하려면 고정익기와 같이 높은 양항비가 필요하다
.
OSTR은 로터의 회전속도를 상황에 맞게 최적의 속도
로 변경함으로써 수직이착륙과 전진비행을 모두 효율
적으로 수행할 수 있는 기술이라고
Karem사는 주장한
다
[15]. V-22과 같은 틸트로터기는 헬리콥터를 기본으
로 하고 고정익기의 장점을 접목해서 전진비행 성능을
높인 것인데 반해
OSTR은 고정익기를 기본으로 하고
최적의 로터 회전속도를 접목한 것이다
.
OSTR의 핵심 구성품은 rigid 로터 허브, 경량의 기
어박스
, IBC(Individual Blade Control) 전기기계적 작
동기
, 그리고 경량의 강건한 로터 블레이드이다. 경량
의 힌지리스 허브는 넓은 범위의 분당 회전수 대역을
가지며
, 기어박스는 터빈의 엔진 효율을 높이고 접선
방향의 힘을 줄인다
. IBC 작동기는 항력이 작고 무게
도 작으며 높은 신뢰성을 가진다
. 마지막으로 경량의
강건한 로터는
2:1 이상의 분당 회전수 영역을 감당할
수 있고 디스크 로딩이 작으며 첨단 복합소재로 제작
된다
. 비록 OSTR이 JMR-TD와 VTOL X-Plane 사업에
서 비행체 개발 대상에서는 탈락했지만
2.1절에서 언
급했듯이
Karem사는 JMR-TD 예산으로 전기기계적
작동기를 사용하는 혁신적인 로터 허브 제작과 시험을
지원받고 있다
. Karem사는 OSTR이 승객용/화물용
민수기뿐만 아니라 다양한 용도와 체급의 군용기로도
활용될 수 있다고 주장한다
.
3.5 Sikorsky & Lockheed Martin RBW
Sikorsky사 팀은 RBW(Rotor Blown Wing) 기술을
채택한
Tail-Sitter 형태의 VTOL을 X-Plane 사업에 제
안했다
. RBW는 고정익기의 공기역학과 로터 조종을
잘 통합해서 복잡하지 않은 형상의
VTOL을 개발할 수
있는 기술이다
. Tail-Sitter VTOL은 과거에도 개발 시
도가 많이 있었다
. Boeing사가 개발했던 Heliwing은
그림
11. TR36XP 형상 및 적용된 주요 기술[15]
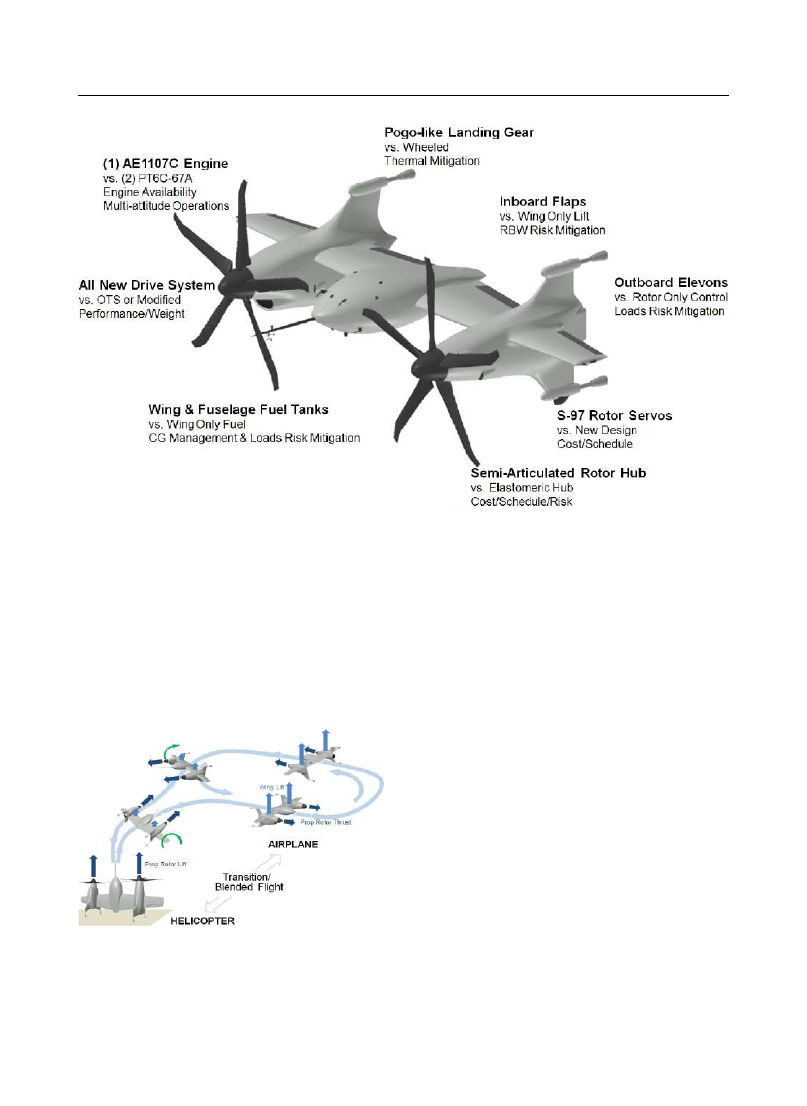
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
63
1995년에 6번째 비행을 하다가 추락한바 있는데,
Sikorsky사 팀이 제안한 VTOL형상이 Heliwing과 유
사하다
. Heliwing이 엔진 고장과 가속도 1g 이하일 때
비효율적인
teetering 로터가 문제였는데 Sikorsky사
는
FADEC이 포함되고 파워가 충분한 엔진과 모든 가
속도에서 효과적인
semi-articulated 로터를 채택함으
로써 문제점을 극복할 수 있다고 주장한다
[16].
이
Tail-Sitter의 성능은 전진비행속도 667km/h, 정
지비행효율
80%, 양항비 14, 유용하중 40%, 총이륙중량
5.4톤으로 DARPA의 요구사항을 충족한다. Sikorsky사
역시
Karem사와 마찬가지로 RBW 기술은 DARPA에
제안한 무인기뿐만 아니라 군용 화물기와 전투기 등의
유인기 개발에도 활용될 수 있다고 주장한다
.
3.6 DARPA ARES Program
VTOL
X-Plane
사업
외에도
DARPA는
ARES(Aerial Reconfigurable Embedded System) 사
업을 진행 중에 있으며
Piasecki사와 Lockheed Martin
사가 땅에서도 운용 가능한
VTOL, 즉 “Flying Car” 개
발 회사로
2012년에 선정되었다. ARES는 다양한 유상
하중을 수송하는 무인
VTOL을 개발하는데 목적이 있
다
. 넓은 작전 지역과 복잡한 지형 그리고 비대칭 위협
이 존재하는 현재의 전쟁 환경에 적응하기 위해서는
“Flying Car”가 필요하다는 미국방부의 판단에 따라
ARES는 2010년 경 착수되었다. 그 간 여러 단계를 거
쳐 현재
Piasecki사와 Lockheed Martin사가 제안한 형
태의
VTOL이 개발 중이다. 그림 14에서 볼 수 있듯이
그림
12. Sikorsky사가 제안한 RBW를 적용한 Tail-Sit er[16]
그림
13. Tail-Sit er의 운용개념[16]
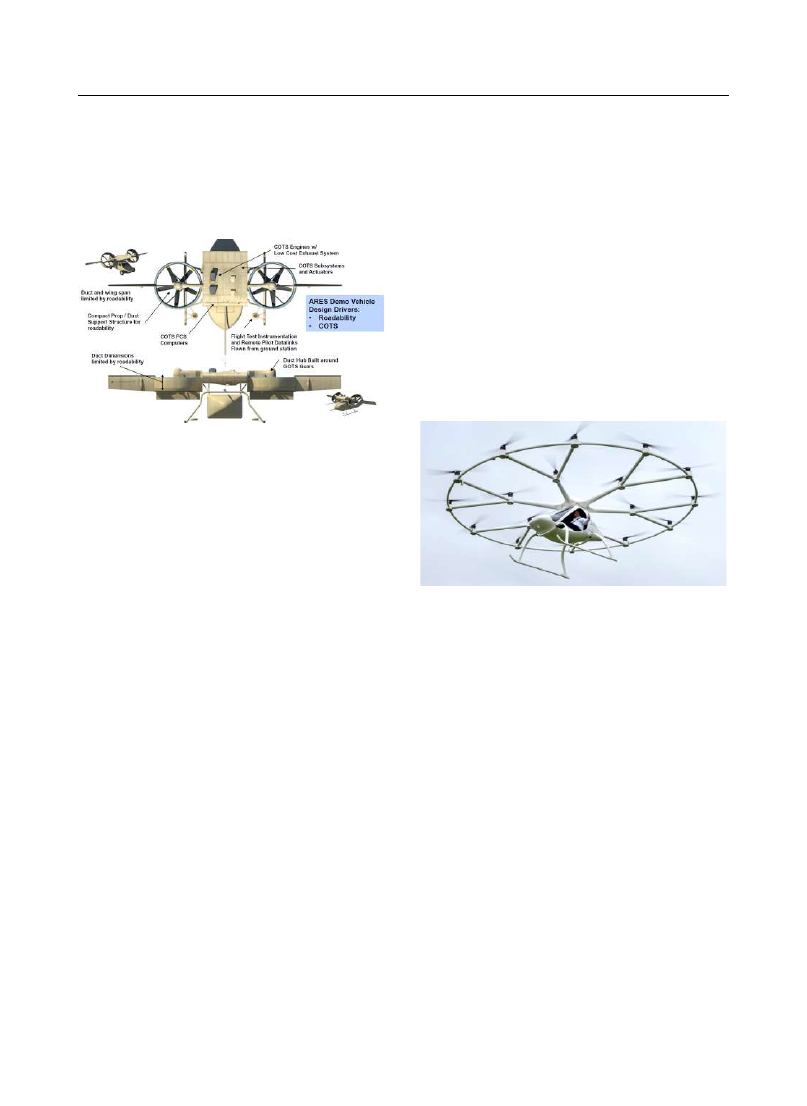
64
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
이
VTOL은 덕티드 팬 2개를 장착한 날개를 틸팅할 수
있는 형상이다
. 실제로 육상을 달리는 자동차는 아니
고 수직이착륙 기능을 이용해 화물을 필요한 지점에
운반하는 임무를 수행한다
.
그림
14. ARES 사업에 제안된 VTOL[17]
3.7 멀티콥터와 전기 헬리콥터
멀티콥터는 중국의
DJI사가 취미용, 방송용 멀티콥
터를 대중화시키면서 시장이 커지고 있다
. 최근에 하
이브리드동력을 사용하는 멀티콥터에 대한 연구가 진
행되고는 있지만 대부분의 멀티콥터는 이차전지를 동
력원으로 하여 모터를 구동하고 모터에 장착된 프로
펠러를 회전시켜 양력과 조종력을 얻는다
. 구동시스
템으로 본다면 멀티콥터도 회전익기로 분류할 수 있
으나 멀티콥터가 주로 무인기이고 총이륙중량도 작아
서 회전익기를 연구하는 사회에서 헬리콥터나 앞에서
소개한 다른
transformative vertical lift에 비해 주목
을 받고 있지는 못하다
. 하지만 최근 독일에서 유인 멀
티콥터를 개발하고 독일 공역에서 운행할 수 있는 인
증을 받음으로써 멀티콥터에 대한 관심도 높아졌다
.
독일 회사인
e-volo사는 VC200 Volocopter를 개발
중인데
, 이 항공기는 사람이 타고 비행할 수 있는 인증
을 받은 최초의 멀티콥터이다
. VC200은 2016년 2월 독
일 항공 당국으로부터
‘permit-to-fly’ 인증을 받았으
며
, 이 인증을 통해 동 항공기는 독일 영공에서 비행을
할 수 있게 되었다
. VC200은 전기동력을 사용하는 유
인 멀티콥터로서
9개의 전지와 18개의 전기모터 구동
프로펠러로 양력 및 추력을 발생한다
. 프로펠러는 회
전 속도에 변화를 줄 수 있고 피치는 고정하는 형태이
며 기체는 가벼운 복합재로 제작되었다
. VC200은
2km의 고도에서 100km/h의 속도로 비행할 수 있으
며 최대이륙중량은
450kg이고 1시간 이상 비행이 가
능하다
. e-volo는 VC200을 형식증명을 받아 양산할 계
획이며
, 2년 내에 항공 스포츠 시장에 진출한 후 궁극
적으로는 에어 택시로 판매할 계획이다
. 세계적인 IT
기업인
Intel은 2016년에 Ascending Technologies
GmbH를 합병했는데 이 회사는 2015년에 e-volo에 자
금을 투자한 바 있다
. 이와 관련하여 Intel은 자사가 미
래의 유
/무인 항공기의 개발에 도움이 되었으면 하는
취지에서 투자를 하였다고 설명했다
[12].
그림
15. VC200 Volocopter[18]
전기동력 헬리콥터에 대한 연구는 미국의
Sikorsky
사가
2010년 영국의 Farnborough 에어쇼에서 Firefly
라 명명한 전기동력 헬리콥터의 존재를 알리고 이어
미국의
Oshkosh에서 열린 전시회에서 전시를 함으로
써 세간에 알려졌다
. Firefly는 Sikorsky사의 S-300C 헬
리콥터를 개조한 것으로
1명의 조종사가 타고 비행시
간은
10분 내외, 최대전진비행속도는 148km/h이다.
190마력의 모터와 리튬 이온 전기 팩 2개로 전기동력
장치를 구성했다
. 그러나 Firefly에 대한 후속 연구결
과는 더 이상 발표된 바가 없다
.
FireFly 이후 전기동력 헬리콥터에 대한 연구가 소
강 상태에 빠져든 상황에서
2016년에 들어 미국의 엔
지니어링 전문회사인
TIER 1 Engineering사가 미국의
소형헬리콥터 전문회사인
Robinson사의 R44를 전기
동력 헬리콥터로 개조하는 개발에 뛰어들었다
. 중/대
형 헬리콥터가 현재의 전지기술로는 필요한 동력을 충

박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
65
분히 공급받기 어려운 상황에서 상대적으로 중량에 대
한 부담이 적은 소형 헬리콥터에 먼저 전기동력을 적
용하려는 노력은 타당해 보인다
.
개조된
R44는 2016년 9월 13일 처음으로 정지비행
에 성공했고
, 9월 21일에 122m 고도에서 5분간 비행하
면서 최고속도
148km/h를 달성했다. 동 헬리콥터는
무게 약
500kg의 Brammo사 리튬 폴리머 전지와 두 개
의 전기모터를 장착했다
. 총이륙중량은 1.1톤(2,500파
운드
)이며 최대비행시간은 20분 , 비행거리로는 56km
정도 될 것으로
TIER 1 Engineering사는 예측했다.
R44의 원 제작사인 Robinson사와는 어떤 협력도 없이
TIER 1 Engineering사 단독으로 개발하였으며 R44를
선택한 이유는 중량
227kg의 Lycoming사 IO-540 피스
톤 엔진을 제거하면
45kg 중량의 전기모터를 장착하
고도 많은 전지를 실을 수 있었기 때문이라고
TIER 1
Engineering사는 밝혔다. 이번 프로젝트의 목표는 전
기동력 헬리콥터의 가능성을 검토하고 기술 개발이 더
필요한 부분이 무엇인지 식별하며 전지의 성능 자료를
얻는데 있고
, 궁극적인 목표는 272kg의 유상하중을 싣
고
150분간 비행할 수 있는 전기동력 헬리콥터의 개발
이라고
TIER 1 Engineering사는 말했다.[20,21]
그림
16. FireFly[19]
그림
17. 전기동력 R44[21]
그림
18. R44에 장착된 전기동력시스템[21]
4. 결 론
헬리콥터와 틸트로터기 외에는 상용화된
VTOL기
가 거의 없는 상황에서 최근 전기 동력을 분배해서 동
력원으로 삼는 새로운 형태의
VTOL에 대한 연구가 활
발하다
. AHS의 Transformative vertical flight concept
initiative는 전기/하이브리드 동력을 사용하는 차세대
수직이착륙기의 로드맵을 작성하기 위해 구성되어 워
크숍과 포럼 등을 통해 관련 연구개발 현황을 공유하
고 있다
. 미국은 현재 운용중인 헬리콥터의 현대화를
추진하면서 동시에 헬리콥터를 대체할 수 있는
VTOL
을
FVL, JMR-TD 사업 등을 통해 개발하고 있다. 즉, 현
재 어느 정도 성숙된 기술인 틸트로터기나 복합 헬리
콥터 기술을 상용화하기 위해 노력하면서 동시에 더
먼 미래에 사용할 수 있는 혁신적인
VTOL을 DARPA
의
VTOL X-Plane 사업 등을 통해 연구하고 있다.
우리나라도 이미 종료된
KHP 사업, 후속으로 진행
중인 소형무장헬기
(LAH : Light Armed Helicopter)/
민수헬기 등 현재 수요 충족을 위한 개발 뿐 만 아니라
미국과 유럽 등에서 선점하기 위해 자금과 기술을 투
자하고 있는 혁신적인
VTOL 분야의 기술 개발에 적극
적으로 참여해야 할 것이다
.
후기
본 논문은 한국항공우주연구원의 주요사업
"신개념 수
직이착륙 무인기 개념연구
"의 연구 결과 중 일부입니다.

66
박중용 / 항공우주산업기술동향 14/2 (2016) pp. 55~66
참고문헌
1. Jeremy Graham, “Definition of a Rotorcraft”,
Feb. 2013
2. https://vtol.org/what-we-do/transformativ
e-vtol-initiative
3. Ross Guckert, “Program Executive Office
Aviation Overview”, 72nd AHS Forum, May
17-19, 2016
4. Bob Sheibley, “Improved Engine Program
(ITEP) Future Vertical Lift(FVL)”, 72nd AHS
Forum, May 17-19, 2016
5. http://digitaledition.rotorandwing.com/oct
ober-2016/u-s-vertical-lift-randd-on-verge-of
-bearing-fruit/
6. http://www.bellhelicopter.com/military/be
ll-v-280
7. Broad Agency Announcement Vertical
Take-Off
and
Landing
Experiment
Aircraft(VTOL X-Plane), Tactical Technology
Office(TTO), DARPA-BAA-13-19, Feb. 25,
2013
8. Mark D. Moore, “Transformative Vertical
Flight - The Forthcoming Era of Distributed
Electric Propulsion”, 72nd AHS Forum, May
17-19, 2016
9. 김근배, 이보화, 박부민, “항공기 전기추진시
스템 기술 동향
”, 항공우주산업기술동향, 14권
1호, pp. 70~82, 2016
10. Alex Stoll, “Joby Aviation”, 72nd AHS Forum,
May 17-19, 2016
11. Mike Hirschberg, "A Small LightningStrike",
Vertiflite, Vol.62, No.4, pp. 10~11, 2016
12. 박중용, “전기/하이브리드 동력 수직이착륙기
개발 동향
”, 한국항공우주연구원 e-정책정보
센터 기술동향
, 2016.05.11.
13. Carl G. Schaefer, Jr., “LightningStrike VTOL
X-Plane Program”, 72nd AHS Forum, May
17-19, 2016
14. Perry
Ziegenbein,
“PhantomSwift
Quad-Ducted Fan Aircraft Configuration
Development”, 72nd AHS Forum, May 17-19,
2016
15. Thomas Berger, “Karem TR36XP DARPA
VTOL X-Plane”, 72nd AHS Forum, May 17-19,
2016
16. Mark Alber, “Sikorsky Lockheed Martin
RBW”, 72nd AHS Forum, May 17-19, 2016
17. Piasecki Aircraft Corporation, Lockheed
Martin
Corporation,
“DARPA
ARES
Program Aerial Reconfigurable Embedded
System”, 72nd AHS Forum, May 17-19, 2016
18. http://e-volo.com/
19. http://www.sikorsky.com/Pages/Innovatio
n/Technologies/FireflyTechnology.aspx
20. http://www.aviationtoday.com/rw/comme
rcial/technology/88800.html
21. http://www.tier1engineering.com
22. 박중용, “회전익기 분야 최신 연구 동향 –
Transformative Vertical Flight”, 2016년도 회
전익기체계 부문위원회 하계 워크숍
, 2016.
9.22~23, 부산대학교 상남국제회관

항공우주산업기술동향 14권 2호 (2016) pp. 67~76
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
미국의 정지궤도 기상위성 개발 동향
남문경*
1 )
Development Trends of GOES in the United States
Nam, Moon-gyung*
ABSTRACT
GOES(Geostationary Operational Environmental Satellite)-R, the starter of next generations, was
launched on the 19th Nov. 2016 at kennedy Space Center, Florida. It was named GOES-16 after
launch and In-orbit-test is currently underway on the 89.5 degree West in the geostatioany orbit.
Since the first GOES-1 was launched in 1975, 16 satellites have been developed with the huge
technical enhancement through 4 generations in USA.
In this paper, the technical features and progress of American weather satellite is described in
brief with a focus on the observation imager and spacecraft key functions. In addition, the
schedule process and key milestones in the GOES-R development are reviewed
초 록
미국의 차세대 정지궤도 기상위성
GOES-R이 2016년 11월 19일 발사되었으며, 현재는
GOES-16으로 명명되어 본연의 임무 수행에 앞서 각종 궤도상 시험을 하고 있다. 미국의 정지궤
도 기상위성은
1975년 10월 GOES-1 발사 후 지금까지 16기가 개발/발사되면서 4세대에 걸쳐
기술적 발전을 이루어왔다
. 발사에 즈음하여 미국 정지궤도 기상위성의 기술적 특성과 관측기
및 이를 지원하는 위성체 기능의 기술적 진화를 개략적으로 소개한다
. 또한 GOES-R 위성의 전
반적 개발 과정 및 일정에 대하여도 기술하였다
.
Key Words : GOES, GOES-R, Weather Satellite(기상위성), Imager(관측기), ABI(고성능관측기),
Satellite(위성), INR(영상 위치 유지 및 고정 시스템)
* 남문경, 한국항공우주연구원, 위성연구본부 정지궤도복합위성체계팀
mgnam@kari.re.kr
68
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
1. 서 론
미국 항공우주국은 플로리다 케네디 우주발사센
터에서 정지궤도 기상위성인
GOES (Geostationary
Operational Environmental Satellites)-R의 발사일
을
11월 4일로 정하고 제반 준비 작업을 하고 있
던 와중에 허리케인 매튜의 영향을 받게 되었으며
유사 발사체의 부스타 이상상태가 보고됨에 따라
제반 발사 조건의 정밀 검토 후
11월 19일 성공리
에 발사하였다
. 발사 후에는 GOES-16으로 명명하
였다
.
미국은
1975년 10월 GOES-1을 발사한 이래 현
재까지
15기를 발사하였다. 현재는 2006년 발사된
GOES-13(GOES-East)이 2010년 4월부터 서경 75
도에
, 2010년 발사된 GOES-15 (GOES-West)가
2011년 12월부터 서경 135도에 배치되어 아메리
카 대륙 및 주변 대양을 주기적으로 관측하고 있
다
. GOES-14는 한 때 GOES-13의 고장으로 인해
대체 임무를 수행하였지만 지금은 서경
105도로
이동하여 보관 모드로 대기하고 있다
. <그림 1>
은 현재의
GOES 위성의 경도상 배치를 보이고
있다
.
그림
1. 미국의 정지궤도 기상위성 배치도
GOES-16은 발사 후 서경 89.5도에서 약 1년 에
걸쳐 광범위한 점검과 검증시험 단계를 거쳐
GOES-13을 대체하기 까지는 서경 105도에서 보관
모드로 대기할 것이다
.
GOES 위성은 6개의 측정 장비를 탑재하고 있
는 정지궤도용 지구 및 우주 환경 관측 위성이지
만 기상관측탑재체인
ABI(Advanced Baseline
Imager) 기능을 강조하여 정지궤도 기상위성으로
지칭하였다
.
GOES-R 위성 발사에 즈음하여 미국 정지궤도
기상위성의 발전사를 조명해보며 특히
GOES-R 의
개발 과정을 기술한다
.
2. 세계 정지궤도 기상위성 운영
현재 운용되고 있는 세계의 정지궤도 기상위성
은
<표 1>과 같다. 한국의 천리안(Chollian)-1 위성
을 제외한 위성들은 자국에서 설계 제작되어 자국
의 발사체로 발사되었다
.
표
1. 정지궤도 기상위성 운용 국가
국가
위성명
궤도
미국
GOES-13, 15
75°W,
135°W
유럽
Metrosat-6, 7, 8, 9
3.5°W,
0°W, 63°E,
57.5°E
일본
Himawari-7, 8
145°E,
140°E
중국
FY-2E, 2F, 2G
86.5°E,
123.5°E,
105°E
러시아
Elektro_L no.1
76°E
인도
Kalpana-1,
Insat-3A, -3D, -3DR
74°E, 93.5°E,
82°E, 74°E
한국
Chollian-1
128.2°E
3. 미국 정지궤도 기상위성 GOES
시리즈
기상위성 개발 체계는 국립해양대기국
(NOAA:
National
Oceanic
and
Atmospheric
Administration)에서 개발예산을 확보하며 임무요
구조건 문서를 발행한다
. 이후 개발단계에서는 항
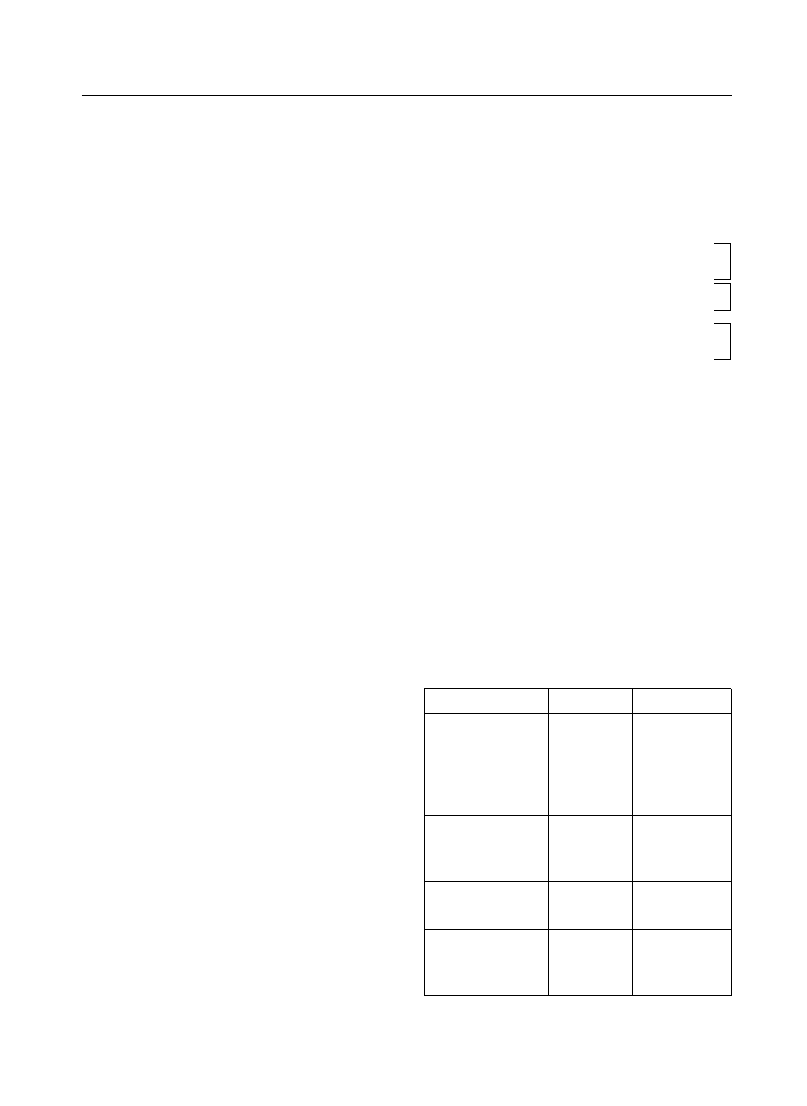
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
69
공우주국
(NASA: National Aeronautics and Space
Administration)과 공동으로 주관하며 발사 후에는
NOAA가 운영책임을 진다.
위성에 탑재되는 관측센서는
NASA가 별도의
계약 구매를 하여 관급품으로 위성체 제작회사에
제공한다
. GOES 1세대에는 Raytheon SBRS (Santa
Barbara Remote Sensing) 에서 VISSR (Visible
and Infrared Spin Scan Radiometer)를 제공하였
으며
GOES
2세대 및 3세대 위성에는
ITT(International Telephone & Telegraph) Corp.
에서 관측기
(Imager)를, 4세대 위성에는 Exelis Inc.
에서
ABI를 공급하였다.
Exelis Inc. 는 2011년 ITT Corp.에서 분사된 회
사이지만
2015년 2월 Harris Corp.에 합병되었다.
Harris Corp. 에서는 자국 기상 위성의 관측기
(Imager) 뿐만 아니라 일본의 기상위성 Hiwamari
9 까지 줄곧 관측기(Imager)와 AHI (Advanced
Himawari Imager)를 제공해 왔으며 한국의 천리
안위성
1, 2A에도 관측기(Imager), AMI(Advanced
Meteorological Imager)를 제공하였다.
GOES-R 프로그램 사무소는 <그림 2>에서 보는
바와 같이 상무성
(DoC:
Department
of
Commerce) 산하 국립해양대기국(NOAA) 산하 국
립환경위성자료정보센터인
NESDIS
(National
Environmenral, Satellite, Data & Information
Service)에 소속되어 있으며,
NASA/GSFC
(Goddard Space Flight Center)와 긴밀하게 협력하
고 있다
.
하부의 비행 개발과제
(Flight project)는 위성
체
, 탑재체, 발사체 선정 및 발사, 기타 보조통신
탑재체등을 조달 관리하는 업무로
NASA가 담
당하고
있으며
지상운영
개발과제
(Ground
Project)는 지상 시설, 안테나, 위성관제, 위성 명
령
, 통제용 소프트웨어 및 하드웨어, 위성자료처
리
, 최종자료의 생성, 분배 등을 NOAA가 책임
지고 있다
.
NESDIS
NOAA
DOC
GOES-R Program
System Program Director : NOAA
Deputy System Program Director : NASA
NASA
Program Control Lead : NOAA
Program Systems Engineering
Lead : NASA
GSFC
Management Council
Program Scientist
NOAA
NOAA program
Management Council
Contracts Lead: NOAA
Flight Project
Manager ; NASA
Deputy : NOAA
Ground Project
Manager : NOAA
Deputy : NASA
Program
Mission
Assurance
Lead : NASA
---- communication with
reports to
그림
2. GOES-R 프로그램 조직도
기상위성 개발 프로그램은 정기적
/부정기적으로
의회 산하 감사원인
GAO (Government Audit
Office)와 상무성 산하 점검단인 OIG (Office of
Inspector General)에서 개발 일정, 예산 및 위험도
등 사업 전반에 대하여 평가 한다
.
미국의 정지궤도 기상위성은 개발내용의 특성
에 따라
4개의 세대로 구분한다. 시리즈별 개발기
간
(계약부터 마지막 기 발사까지) 및 제작사는
<표 2>과 같으며 개발 역사는 <그림 3>과 같다.
표
2. GOES 시리즈별 개발기간 및 제작사
시리즈
개발기간
제작사
1세대:
GOES 1,2,3
GOES 4,5,6,7
1970-1987
Ford
Aero
space
(SS/L 전신)
Hughes
(Boeing전신)
2세대:
GOES
8,9,10,11,12
1985-2001
SS/L
3세대:
GOES 13,14,15
1998-2010
Boeing
4세대:
GOES-R(16),
S,T,U
2008-2024
L o c k h e e d
Martin
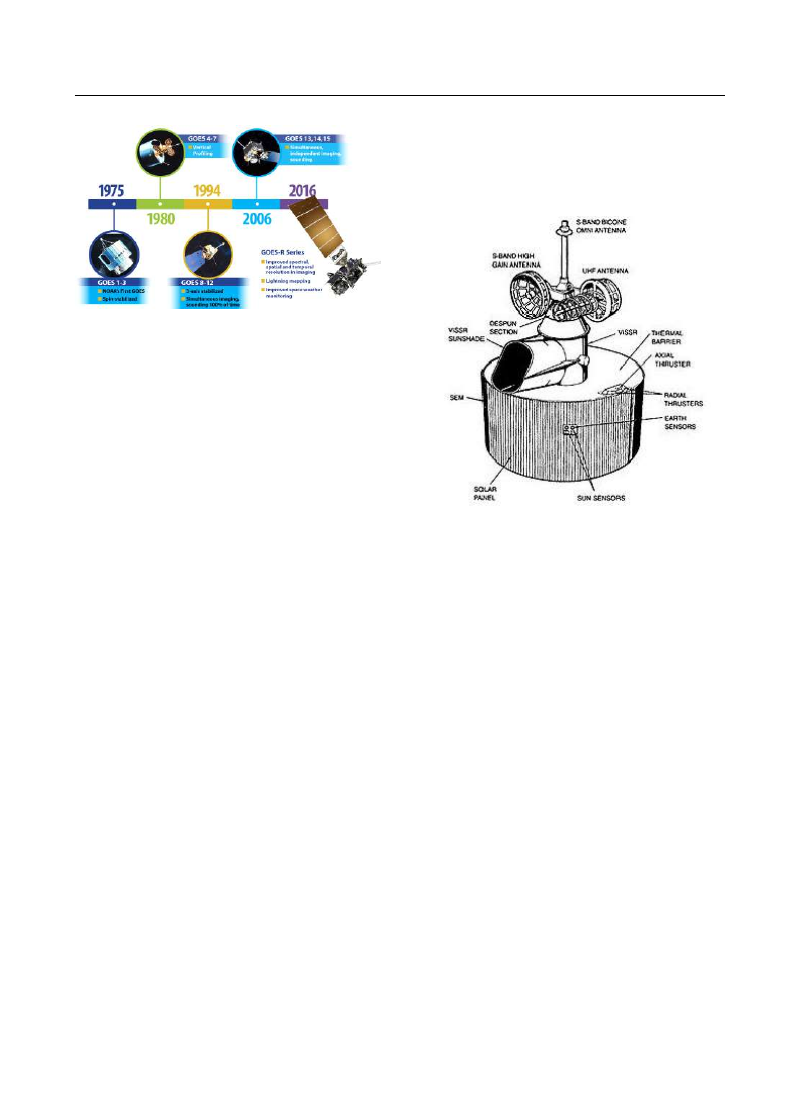
70
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
그림
3. 미국 정지궤도 기상위성 개발 역사
3.1 GOES 1세대
GOES-1 기상위성은 1975년 10월 16일 발사되었
다
. 미국 정지궤도 기상위성 개발 효시는 SS/L(Space
Systems/Loral)이다.
시험위성
ATS(Applications
Technology
Satel ite)와
SMS(Synchronous
Meteorological satel te)-1, 2를 개발/ 발사이후 본 위
성 시리즈로
GOES-1, 2, 3을 개발/성공하였다.
이후
GOES-4, 5, 6, 7은 Boeing사에 의해 개발
발사
(1980.2~1987.2)되었다. 이 시기 Boeing사는
일본의 정지궤도 기상위성
Hiwamari 1~5를
GOES-4와 같은 복제품으로 개발/납품하였다.
이 시기의 위성은 실린더형 본체로 구성되어 있
어서 추력기를 사용하는 방식보다 전력이 적게 들
뿐만 아니라 본체 회전에 의한 자세제어 방식이
용이하다
. 그러나 회전에 의해 태양을 보는 시간이
짧기 때문에 전력 확보에 한계가 있으며 회전에
의해서 관측기
(Imager)가 지구를 보는 시간이 제한
적이므로 기상관측의 임무에 효과적이지 못하였다
.
<그림 4>와 같이 실린더형 위성에서는 태양전지들
이 원통벽에 부착되어 있고
, 관측기(Imager)로는
VISSR(Visible
and
Infrared
Spin
Scan
Radiometer)을 탑재하고 있다.
이 기간 동안
SS/L은 인도로부터 정지궤도용 기상
통신 복합위성을 수주받아 박스 타입의
3축 자세제어
방식의
INSAT(Indian National Satel ite) 1A~D 4기를
개발
(1982~1990) 하였다. SS/L은 이를 시작으로 미국
정지궤도 기상위성 시리즈
2세대를 개발하게 되면서
기상관측 서비스에 획기적인 전기를 마련하였다
.
이 시점에서의 인도는
INSAT 시리즈의 해외 제
작 구매로 자국의 위성 개발능력에 크나큰 초석을
다지는 계기가 되었다
.
그림
4. GOES-4 위성 모형도
3.2 GOES 2세대
기상관측 및 기상예보의 정확성을 높이기 위해
서는 양질의 위성영상
, 동일 지역 반복 관측 영상,
빠른 지상 전송 및 지상에서의 자료처리 등의 기
술이 필요하게 된다
. 당시 NOAA에서는 보다 향
상된 기상예보를 위해 관측기
(Imager)를 통한 상시
관측과 대기온도 및 습도의 수직분포 자료를 제공
할 수 있는 사운더
(Sounder)를 동시 탑재하여 운
용하는 요구조건을 내걸었다
. 이는 실린더형 본체
로 스핀 안정화 제어 방식의 기존 위성으로서는
불가능하였다
. 이에 SS/L은 박스형, 3축 자세제어
방식의
INSAT-1 위성체를 개량하였다. 또한 상시
관측의 효과를 극대화하기위해 지구상 위치에 대
응하는 영상내픽셀의 정확한 위치확보
(navigation)
와 동일 위치에 대응하는 반복영상의 픽셀위치 일
치
(registration)기능이 필요하게 되었다.
SS/L은 영상의 기하학적 위치 정확도를 제고하
는 시스템으로 영상내 위치확보 및 유지시스템인
INR(Image Navigation and Registration)을 처음으
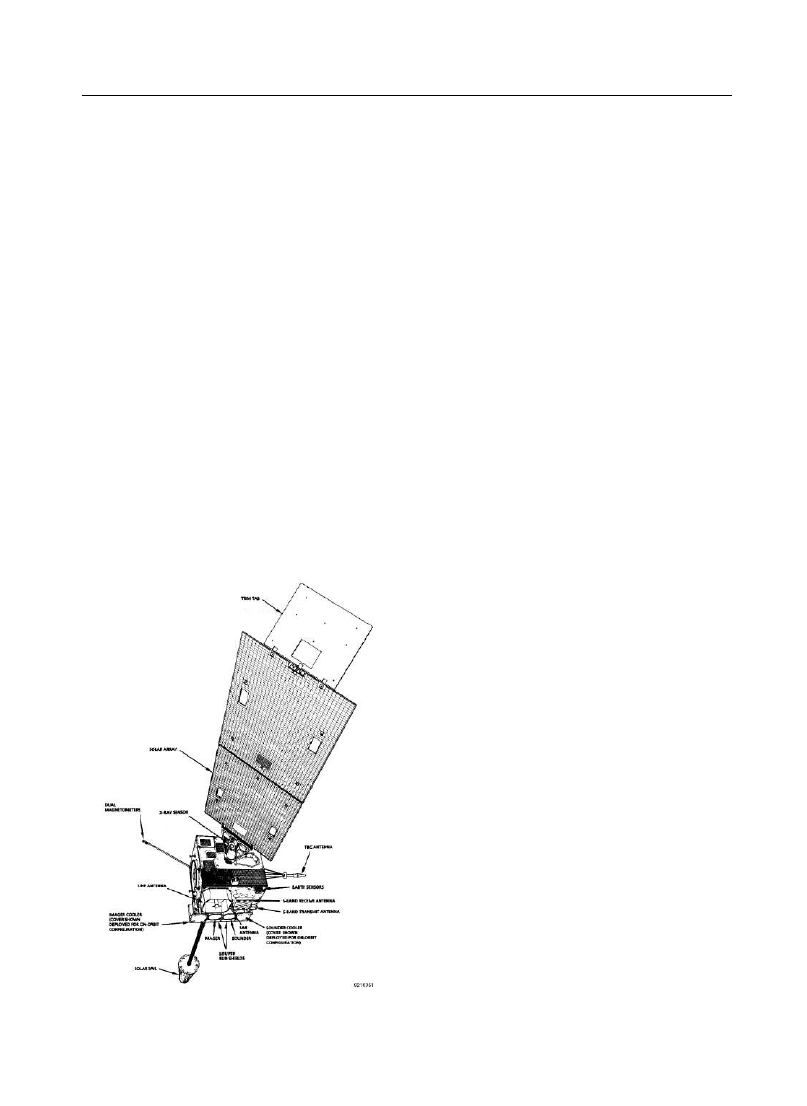
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
71
로 개발하여 다수의 특허권을 가지고 있었다
. 환경
적으로 외란에 의한 위성체의 궤도상 이동과 위성
체와 탑재된 관측기 사이의 접촉성 간섭
, 관측기내
의 기계적 구동 영향 등이 감안되어야 한다
. 차세
대
GOES 시리즈에서도 이 시스템을 기반으로 지
속적으로 보강되어 왔다
.
형상적으로는 관측기
(Imager)와 사운더(Sounder)
의 성능 저하를 방지하기 위하여 내부적외선 검출
기
(IR detector)가 극저온 환경에 노출되도록 한쪽
면에는 태양전지판을 달지 않는 설계를 하였다
. 이
에 수반되어 비대칭 형상으로 인해 유발되는 태양
복사 압력에 의한 토크에 균형을 맞추기 위한 캐
너피 형태의 부가물
(solar tail)을 부착하였다. 한편
태양전지판 끝단에는 토크의 미세한 조정을 위하
여 방향조정탭
(trim panel)을 설치하기도 하였다.
2세대 초기인 GOES 8은 <그림 5>와 같은 형상
으로
1994년 4월 13일 발사되어 성공적으로 운용
되었으며
, 시리즈 마지막이었던 GOES-12는 2001년
발사되었다
.
그림
5. GOES-8 위성 모형도
SS/L은 일본의 2세대 위성인 MTSAT 1 위성과
MTSAT-1R(Hiwamari 6)도 GOES 2세대를 기본 모
델로 하여 제작 납품하였다
.(일본은 자국의 정지궤
도용 기상위성
7기를 연이어 미국으로부터 제작/
구매하여 오늘날에 이르렀다
)
3.3 GOES 3세대
GOES 3세대에 해당하는 GOES-13 시리즈 개발
은
Boeing 에게 돌아갔다. 그 당시 GOES 2세대
개발사이었던
SS/L은 법정관리업체(Chapter 11)로
지정되어
GOES 위성뿐만 아니라 한국의 천리안위
성 개발의 입찰 자격을 맞추지도 못하였다
. 이후
SS/L은 상업용 통신위성의 제작에만 전념하는 상
황이 되었다
.
NOAA에서는 악천후 기상의 발생 지점과 이동
을 보다 정확히 예측하기 위하여
INR 요구조건을
상향 조정하여 요구하였다
.
이에
Boeing은 기존 INR시스템을 상당 부분 보
강하였다
. 위성의 자세 결정을 위한 센서로서 기존
의 불안정한 지구센서
(Earth Sensor) 대신에 별 추
적기
(Star Tracker)를 탑재하였다. 또한 관측기
(Imager), 사운더(Sounder), 별추적기의 공동 설치
대를 위성체 상판에 설치하여 위성체의 열변형에
의한 간섭을 최소화하였다
.
이외에도 기존의 레인징 데이터이외에 관측기
(Imager)에서 관측되는 지구상의 랜드마크 데이터
를 이용하여 위성의 궤도 결정 정확도를 높였다
.
또한 영상기의 별 센싱자료 이외에도 지상 랜드마
크 자료는 영상기의 자세 결정에도 활용되었다
.
관측기
(Imager)와 사운더(Sounder)의 적외선 검
출기를 항상 극저온에 노출시키기 위해서 위성을
일 년에 한 번씩 요축을 중심으로 회전시키는 소
위
‘yaw flip’개념을 구현하였다.
<그림 6> 에서와 같이 정교한 자세제어 설계로
기존
2세대 기상위성에서 사용되었던 토크 균형붐
(solar tail) 이나 미세 토크 조정탭(trim panel)이
필요 없게 되었다
.
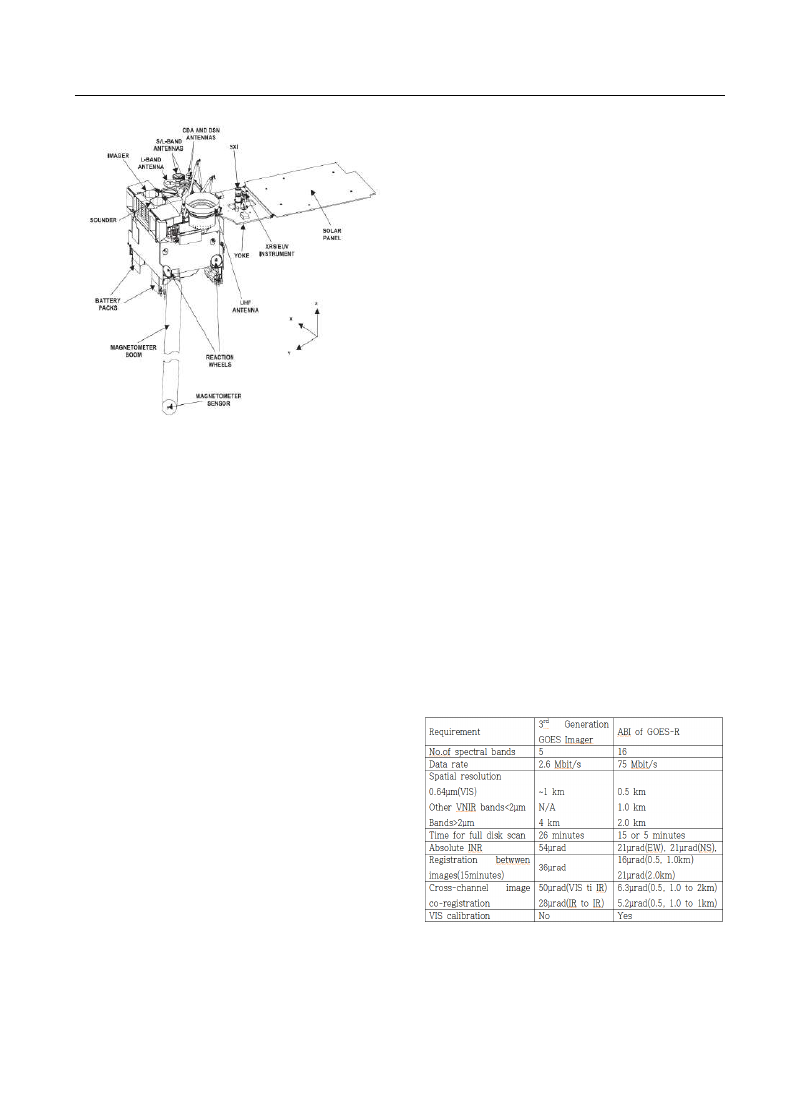
72
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
그림
6. GOES-13 위성 모형도
3.4 GOES 4세대
NOAA는 2000년대 초부터 GOES 위성자료 사
용자 그룹으로부터의 다양하고 정교한 요구사항에
부합하기로 하면서
, GOES-N,O,P,Q 시리즈에서 Q
의 제작 옵션을 포기하고 새로운 임무 요구 조건
을 정립한 후
GOES 4 세대 위성 개발을 발주하였
다
. 그리고 그동안 탑재하였던 사운더(Sounder)의
효용에 대해서 과감히 포기하고 기존의
5채널 관
측기
(Imager)의 대체로 19채널의 획기적인 영상기
(ABI: Advance Baseline Imger)를 개발토록 하였
다
. 향후 사운더(Sounder)는 간섭계(Interferometer)
형태로 개발될 전망이다
.
NOAA는 2008년 12월 9일 GOES-R 시리즈 2기
(GOES-R&S, 발사 후 에는 –16&17로 개명될 것
임
) 위성 개발 낙찰자로 Lockheed Martin사를 선
정하였다
. 이에 GOES 3세대 시리즈인 GOES –13,
-14, -15 위성을 개발/납품하였던 Boeing사는 입찰
고배에 승복하지 못하고 소송을 걸었다가
2009년
7월 철회하였다. Lockheed Martin은 이 기간 동안
개발 업무를 정지할 수밖에 없었으므로
2009년 5
월 정식 계약과 함께 재개 하면서 발사예정일을
2015년 10월로 발표하였다.
Lockheed Martin이 제공하는 위성체 모델은
A2100 타입으로 1990년대에 개발되어 1999년 발사
된 한국통신의 무궁화위성
3호 위성체로 사용된 적
도 있었다
. NASA는 이후에 Lockheed Martin과
GOES-T, U 2기 제작을 추가 계약하였다.
GOES-R 위성은 궤도상 운영 수명이 10년 이
상
(궤도상 보관 수명 5년 별도)으로 3세대 위성
수명
5년에 비하여 활용성이 훨씬 증가하였다.
이는 무엇보다도 기상 관측기
(Imager)의 수명이
3세대 관측기(Imager)에 비하여 채널 수나 성능
향상과 더불어
, 거의 두배로 늘어났기 때문이다.
특히 운영상 모멘트 덤핑
, 스테이션 키핑, 요플립
등의 여파로 관측 지장이 초래되는 시간이 연중
12분을 넘지 않을 정도로 상시관측이 거의 보장
된다
.
GOES-R 시리즈부터는 기상 관측기(Imager)로
ABI (Advanced Baseline Imager)가 탑재된다. 지
금까지 탑재해 왔던 기존의 관측기
(Imager)에 비해
서 월등히 우수한 성능을 가진다
. 즉, 관측 밴드수
가 기존의
5채널에서 16채널로 확장되었으며 공간
분해능
(spatial resolution)이 4배, 전지구 관측 시간
은
5배나 빠르게 향상되었다.
<표 3>에서는 3세대 위성의 관측기(Imager)와 4
세대 위성의 관측기
(Imager)인 ABI를 대략적으로
비교
(INR 성능포함)하였다.
표
3. 3세대, 4세대 관측기(Imager) 성능비교
ABI의 성능을 높이기 위해서는 적외선 탐지기
(IR detector)의 극저온 온도 유지가 필수적이다. 3
세대 기상위성의
5채널 관측기(Imager)에서는 적외
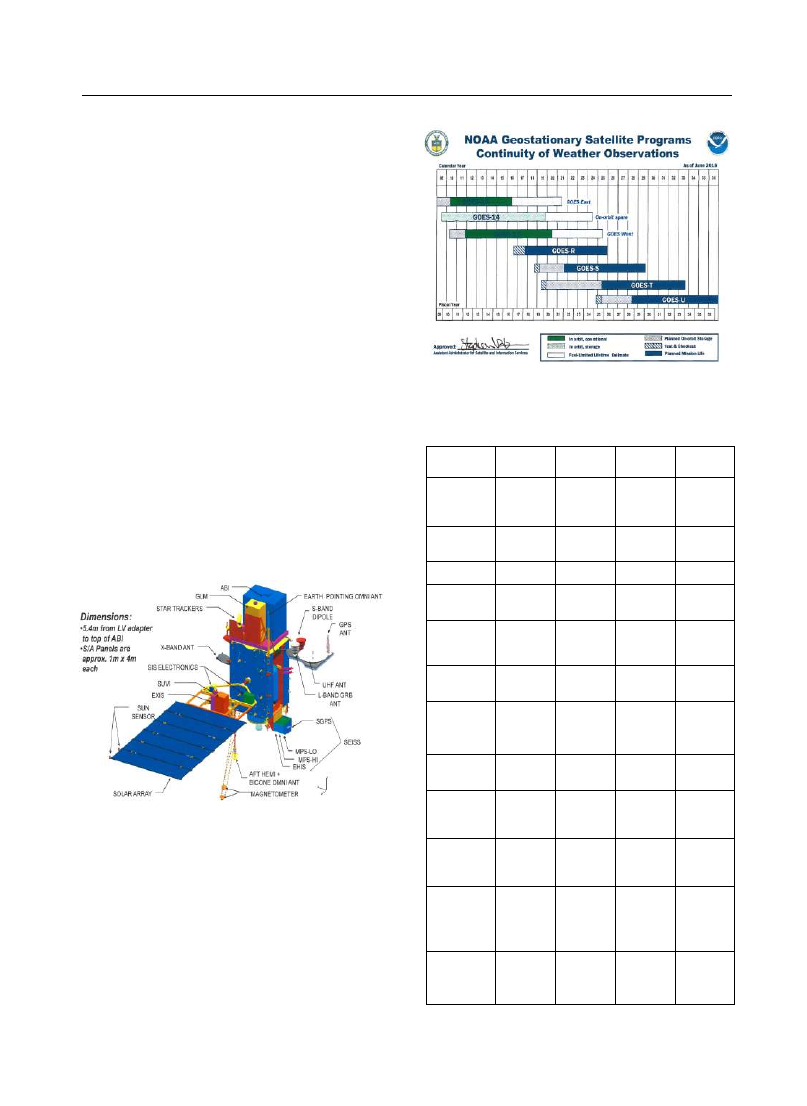
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
73
선 탐지기가 몇 개에 불과하였기 때문에 수동적
개념으로 극한 온도에 자연 노출시켰으나
16채널
ABI의 적외선 탐지기는 몇 천개가 되므로 종래의
개념에서 탈피하여 능동적 개념의 극저온 냉동기
(cryocooler)를 설치하였다. 이는 내부 모터에 의해
지터 현상을 유발하므로 자세 제어 시스템과
INR
시스템의 설계에 새롭게 반영되었다
.
월등히 향상된
INR 시스템은 위성의 정확한 궤
도 정보와 관측기
(Imager)의 자세 정보에 기인한
다
. GOES-R 시스템에서는 처음으로 위성의 궤도
를 위성에 부착되어 있는
GPS 수신기로 받은 신
호로부터 계산하여 지상으로 전송한다
. 종래의 지
상
RF신호를 통한 레인징이나 랜드마크로 계산하
지 않으면서 훨씬 정확한 위치 정보를 산출한다
.
ABI의 자세 상태 정보도 ABI의 별 관측 정보를
지상에서 텔레메트리로 받아 계산한다
. 모든 INR
계산은 위성체에서보다는 지상 소프트웨어에 의해
전적으로 수행된다
. <그림7>은 GOES-R 위성의 구
성도를 보여준다
.
그림
7. GOES-R 위성의 구성도
<그림 8>에서 보는 바와 같이 현재의 4세대 정
지궤도 기상위성인
GOES-R 시리즈는 2016년 11월
19일 발사를 시작으로 하여 2036년 정도까지 미국
의 기상예보에 일익을 담당할 것이다
.
<표 4> 에서는 GOES-R 기상위성까지의 세대별
기술적 변천을 파악할 수 있다
.
그림
8. GOES-R 위성 시리즈 운용계획
표
4. GOES 1,2,3,4 세대별 특성 비교
GOES-1
세대
GOES-2
세대
GOES-
3세대
GOES-4
세대
박스형
크기
-
6.1m x
17.7m x
3.0m
8.4m x
9.1m x
2.9m
6.1 x
5.6m x
3.9m
건조질량/
발사질량
-
1042kg
2270kg
1543kg
3210kg
2,857kg
5,192kg
형태
실린더형
박스형
박스형
박스형
관측기
VISSR
5채널
Imager
5채널
Imager
16채널
ABI
사운더
VAS
Sounder
Sounder
no
Sounder
제어방식
스핀
자세제어
3축
자세제어
3축
자세제어
3축
자세제어
INR
-
INR
INR –en
hanced
INR-
more en
hanced
Imger/bus
interface
-
-
Optical
bench
Optical
bench
Attitude
determinati
on
-
Earth
sensor
Star
tracker
Star
tracker
Orbit
determinati
on
ranging
ranging
GPS
Navigation
correction
star
sensing
Land
mark
star
sensing
Land
mark
Etc.
sail tail
Trim
panel
Cyro
cooler
74
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
4. GOES-R(16) 개발 연혁
GOES-R 조립은 먼저 시스템모듈과 추진코어모
듈
(추진 구조 서브시스템)을 각각 조립한 후 정렬
결합을 하게 된다
. 이렇게 하여 위성체가 완성되면
탑재체를 탑재하고 일련의 시스템 시험 평가를 하
게 된다
.
시스템모듈은 명령 및 자료 처리시스템
, 자료전
송시스템
, 전기서브시스템을 구성하는 부품들과 배
터리로 구성되어 있다
. 추진코어모듈은 추진시스템
이 설치되어 있는 주구조물을 말한다
.
GOES-R위성의 개발 진행 일정은 대략 다음과
같다
.
2011년 2월 예비설계검토회의(PDR:
Preliminary Design Review)를 수행하고 2012년
5월 상세설계검토회의(CDR: Critical Design
Review)를 성공리에 완료하였다. 2014년 3월과 4
월에 추진코어모듈과 시스템모듈이 각각
Stennis
Space Center, NASA Mississippi 내에 있는
Lockheed Martin Spacce & Technology Center
와
Newton, Pennsylvania 시설에서 조립, 시험
을 마친 후 콜로라도주 덴버 조립장에 도착하였
다
. ABI는 2014년 3월에 도착하였고, 이어 2014
년
7월 30일 시스템 결합검토회의(SIR: System
Integration Review)를 수행하여 시스템레벨의
조립
, 시험과 발사작동을 시작할 준비가 되었는
지 점검하였고
,
시스템레벨 조립시험
(SAIT:
System Assembly, Integration, and Test phase)
단계로의 진입을 결정하였다
. 이후 2014년 9월
18일 위성체의 시스템 모듈과 코어모듈이 결합
되었고
2015년 1월 12일 ABI를 비롯한 6개의 탑
재체가 위성체에 조립되었다
. <그림 9>는 시스
템 모듈과 추진코어모듈의 결합과정을 보이고
있다
.
그림
9. GOES-R 위성의 정렬결합 과정
2015년 5월 21일 환경시험준비 점검회의(PER:
Pre Environment Review)를 마치고 일련의 환경
시험
(진동시험, 충격시험, 열진공시험, 전자파시험)
일정을 진행하여
2016년 7월 완료하였고, 8월22일
콜로라도주 덴버의
Lockheed Martin 총조립장에
서 플로리다주의
Kennedy Space Center(KSC)로
운송되어
8월 26일부터 Launch campaign 에 돌입
하였다
. <표 5>은 시스템 레벨에서의 조립 시험
일정을 정리하였다
.
표
5. 시스템레벨 조립 시험 주요일정
2013. 1
코어구조물 도착
2014. 3
추진코어모듈 도착
2014. 4
시스템모듈 도착
2014. 9
시스템모듈과 코어모듈 결합완료
2015. 1
모든 관측장비 장착 완료
2016. 7
환경, 기계, 전자기파시험 완료
2016. 7
위성 선적전 최종검토회의 실시
2016. 8
플로리다 KSC 발사장도착
System AIT 단계에서는 주요 점검 포인트로
Flight Operations Review (FOR) 과 Operational
Readiness Review(ORR)을 수행하였다. 이를 준비
하기 위해서는
5차례의 End-to-End test 시험을
통하여 발사 전 위성과 지상국시스템간의 하드웨
어
, 소프트웨어 및 통신 접속 등의 적합성을 검증
하였다
.
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
75
발사예정일은 진행과정에서 몇 차례의 연기 승
인을 받게 된다
. 2014년 9월에 Lockheed Martin의
요청과
NOAA와 NASA의 승인에 의하여 2016년
3월로 연기되었다가 2015년 12월에 와서는 2016년
10월로 재 연기되었다. 이것도 다시 11월 4일로 연
기되었다가 발사장에서의 허리케인 매튜의 영향과
발사체 부스터 재점검으로 최종적으로
11월 19일
발사되었다
. GOES-R위성의 발사일은 첫 계약상의
예정일로부터 일 년간 지연된 셈이다
.
일련의 발사일정 지연 결정 과정을 보면
<표 6>
과 같다
. Lockheed Martin은 시스템 CDR 까지도
사업 초기 목표하였던
2015년 10월 발사를 목표로
일련의
ETE 시험일정을 유지하고 있었다. 그러나
2013년 가을 NASA는 Lockheed Martin의 요청을
받아들여 발사를
2016년 3월로 연기하길 NOAA에
제안하고
SIR 직후인 2014년 9월 경 수락되었다.
표
6. 발사일정 지연 경과
CDR
무렵
(2012년
5월)
SIR 무렵
(2014년
9월)
ETE#3
직후
(2015년
12월)
MOR
2013.01
2014.06
End-to-end test
#1
2014.02
2014.12
End-to-end test
#2
2014.05
2014.12
End-to-end test
#3
2014.08
2015.05
2015.11
FOR
2014.09
2015.07
2015.11
End-to-end test
#4
2014.12
2015.09
ORR
2015.04
2015.12
End-to-end test
#5
2015.07
2016.01
Anticipated Launch
date
2015.10
2016.03
2016.10
이후 본격적인 조립
, 시험, 평가 단계로 들어갔
지만 남은 일정을 감안할 때
5회의 End-to-end
test를 계획대로 마치기에는 억지가 따른다고 보고
발사를 연기할 가능성이 높은 것으로 판단되었다
.
결국
2015년 11월 5일 End-to-end test 3차 이후
FOR을 마치고 12월 9일 NOAA, NASA 그리고
Lockheed Martin은 남은 일정 수행에 있어서 위험
을 최소화하기 위하여 발사를
2016년 3월에서
2016년 10월로 연기하기로 공식 발표하였다.
일정지연을 완화시키려는 보완책이 때때로 또
다른 리스크를 유발하여 일정지연을 더 악화시키
는 경우가 있다
. 또한 지연된 일정을 만회하기 위
하여 필요에 의해 정해진 반복 시험을 생략하거나
주
7일, 하루 24시간 일체의 여유없이 작업하다간
위험성을 배가시키며 혼선만 초래할 경우가 있다
.
계획이나 업무를 방치해두고 일정을 압축시켜 놓
으면
, 어떤 문제가 생겼더라도 해결할 시간적 여유
가 없기 때문에 전체적으로 더욱 지연될 가능성이
농후하게 된다
.
시스템 시험평가 단계가 성공적으로 마무리되기
위해서는 시험중 발견되는 결함
(defect)이나 이상
(anomaly)에 대한 적절한 인식과 처리가 매우 중
요하다
. 소위 결함관리 (defect management) 절차
에는 결함관리계획
, 결함 식별 및 등급 분류, 결함
분석
, 결함해결책, 결함추적, 결함추세 파악 및 보
고 등이 포함된다
.
시험평가단계에서 효과적인 결함관리를 수행하
기 위해서는 현실적 일정이 설정되어야 하나
2014년
5월(SIR 직전) 에 이미 NOAA에서는 시스템시험
일정이 극도로 비현실적 이라고 지적한바 가 있었
다
. GOES 프로그램은 조립시험단계에서 발견된
문제점들 때문에 주요 일정을 여러 번 연기하게
되었고 이에 전체적인 시험기간을 압축시켰다
. 이
는 시험단계별 다음 절차로 넘어가기 전 결함을
충분히 해결할 시간적 여유를 두지 않기 때문에
위험 정도를 더욱 가중시킨다는 것이다
. 이에 발사
일년 전에 발사 예정일을
10개월 연기하였다.

76
남문경 / 항공우주산업기술동향 14/2 (2016) pp. 67~76
5. 결 언
미국의 기상위성은 기상위성자료 활용그룹으로
부터 사용자 요구사항이 점점 강화됨에 따라
3차
례의 크나큰 기술적 진보를 이루었다
. 기상 관측기
(Imager)의 성능은 5채널에서 16채널로 관측범위도
넓어졌을 뿐 아니라 관측속도
, 관측해상도, 자료전
송속도 등에서도 엄청난 향상이 있었다
. 영상의 품
질을 좌우하는 영상위치유지 및 고정시스템의 정
밀도는 몇 배나 높아졌다
. 이를 보조해주는 위성체
의 자세제어 서브시스템 등도 상당히 세밀해졌다
.
GOES-R위성은 Lockheed Martin이 2008년 5월
주 계약자로 선정되어 발사예정일을
2015년 10월
로 설정하고 개발해 왔으나 과정상의 기술적 문제
로
2016년 3월, 2016년 10월로 2차례 연기되었다.
마침내
2016년 8월 26일 플로리다 발사장으로
이송되어 일련의 발사켐페인을 거친 후
11월 19일
성공리에 발사되었다
. 현재는 GOES-16으로 명명
되어 서경
89.5도 정지궤도상에서 각종 시험중에
있다
.
참고문헌
1. GOES I-M databook
2. GOES N databook
3. NOAA GOES N,O,P – The Next Generation
4. GOES-R Spacecraft Features that allow
Near-Continuous Observation, 2014 Inter
national Workship on SSTDM
5. NOAA’s GOES-R Spacecraft, Lockheed
Martin Corporation
6. GNC 2014: 9th International ESA Conference
on Guidance, Navigation, and Control
Systems, Porto Portugal 2-6 June 2014
7. Fact Checking GOES Current and Future,
Timothy J. Schmit, W.paul Menzel CIMSS
Science Symposium Dec. 12, 2013
8. GOES-R, Eoportal Directory
9. GOES-R website home page
항공우주산업기술동향 14권 2호 (2016) pp. 77~83
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
전자장 해석 툴을 이용한 회로기판의
전자파 간섭 예측
황수설*, 김명환*, 마근수* 1)
Estimation of Electromagnetic Interference on PCB
using the Electromagnetic Field Analysis Tool
Soosul Hwang*, Myunghwan Kim* and Keunsu Ma*
ABSTRACT
In this paper, we show the estimation method of electromagnetic interference on the printed circuit
board using the electromagnetic field analysis tool. The electromagnetic field analysis tool was applied
Ansys's SIwave software. The electromagnetic interference analysis using the electromagnetic field
analysis tool have many advantages for electronic devices design and fabrication. It is possible to
establish a countermeasure against the noise by the previous analysis and this results are favorable for
fabrication. We have applied these methods to the designing of electronics for space launch vehicle.
And these electromagnetic interference analysis will be proceed against the future developed devices.
초 록
본 논문에서는 전자장 해석 툴인
Ansys사의 SIwave를 이용하여 회로기판의 전자파 간섭을 예측하
고 개선하는 방법에 대해 보였다
. 전자장 해석 툴을 이용한 전자파 간섭 해석을 적용하게 되면 PCB
제작 이전에 발생되는 잡음에 대한 대책을 적용할 수 있으므로 전자장치의 설계 및 제작시 유리하다
.
한국항공우주연구원에서 우주발사체용으로 개발되는 전자장치는
PCB 설계시 전자장 해석 툴을 이용
하여 잡음문제를 해결하고자 접근하고 있으며
, 추후 가능한 모든 장치에 대한 전자파 간섭 해석을 수
행할 계획이다
.
Key Words : Electromagnetic Interference, Printed Circuit Board, Power Integrity, Resonance Analysis,
Field Analysis, Noise
* 황수설, 김명환, 마근수, 한국항공우주연구원, 한국형발사체개발사업본부 발사체기술개발단 발사체전자팀
sooseul@kari.re.kr, micele@kari.re.kr, ksma@kari.re.kr

78
황수설 외 / 항공우주산업기술동향 14/2 (2016) pp. 77~83
1. 서 론
현재 우주발사체에 탑재되는 전자장치는 비행
중인 발사체의 상태를 빠른 시간 내에 정확하게
파악하기 위해 많은 데이터의 동시 신호처리가 요
구되며
, 강화되는 정밀도 요구조건을 만족하기 위
해 회로의 동작 주파수는 지속적으로 높아지고 있
다
. 또한, 우주발사체에 탑재되는 위성의 중량 여
유를 확보하기 위해 발사체에 탑재되는 전자장치
는 지속적인 소형
/경량화가 요구되고 있으며, 이
러한 요구를 만족시키기 위해 전자장치의 회로는
더욱 복잡해지고 적용 부품의 집적도 또한 높아지
고 있다
.
전자장치가 고속으로 동작되면 필연적으로 적
용부품 실장을 위한 회로기판
(PCB: Printed
Circuit Board)에서는 보다 많은 잡음(Noise)이 발
생되어 해당 전자장치의 동작 및 성능에 영향을
미치게 된다
. 소형/경량화 설계를 위해 회로의 집
적도를 높이다 보면 신호처리를 위한 회로기판에
아날로그 회로와 디지털 회로가 혼재되도록 설계
될 수 밖에 없으므로 고속으로 동작하는 고집적
전자장치에서는 예측하기 어려운 다양한 잡음이
발생되어 전자장치 서로 간에 전자파 간섭 영향을
주게 된다
. 또한, 발사체에 탑재되는 전자장치는
타 분야에 적용되는 장치보다 엄격한 전자파 환경
시험 규격을 만족하여야 하므로 회로설계 시부터
잡음문제에 대해 보다 적극적인 대책을 수립하여
야 한다
.
본 논문에서는 회로기판에서 발생되는 잡음에
의한 전자파 간섭 정도를 회로기판 제작 이전에
전자장 해석을 통해 미리 예측하고 다양한 잡음대
책을 적용하여 전자파 간섭의 영향을 최대한 억제
시키는 방법에 대해 서술한다
. 전자장 해석 툴을
이용한 회로기판의 전자파 간섭 예측은 회로기판
이 제작되어 전자파 환경시험이 진행되어야만 확
인할 수 있는 회로기판의 구조적인 잡음문제를 회
로기판 제작 이전에 검토하여 미리 대응할 수 있
다는 장점을 가진다
.
2. 전자장치의 잡음대책
2.1 전자파 환경 특성
전자파 적합성
(EMC: Electromagnetic Com-
patibility)이란 전자기기나 장비, 시스템이 주변 전
자장치에 허용될 수 없는 정도의 전자파 장애를
일으키지 않으면서 그러한 전자파 환경에서 신호
에 포함된 정보의 손실 없이 요구되는 기능을 수
행할 수 있는 능력을 말한다
[1]. 이러한 전자파 적
합성은 해당 전자장치에서 발생된 신호가 외부로
방사되어 타 장치에 장해를 발생시킬 수 있는 정
도를 규정한 전자파 간섭
(EMI: Electromagnetic
Interference)과 타 장치에서 발생된 전자파 신호에
의해 해당 장치가 받게 되는 영향에 대한 내성을
규정한
전자파
감응
(EMS:
Electromagnetic
Susceptibility)으로 구분된다[2]. 전자장치의 잡음대
책은 해당 장치에서 발생되는 불요 전자파의 방출
을 규제치 이하로 억제하는
EMI 대책과 일정한
규제치의 전자파 환경 내에서도 해당 장치가 장해
를 받지 않고 정상적으로 동작할 수 있는 내성을
강화하는
EMS 대책을 적절히 적용하는 것이라 말
할 수 있다
.
전자장치에서 발생한 의도된 신호 이외의 모든
신호는 잡음
(Noise)으로 정의할 수 있다. 이러한
잡음은 장치와 연결된 전력선로나 신호선로에 유
기되어 장치 내부로 전달되는 전도성 잡음
(Conducted Noise)과 신호 발생원으로부터 발생된
잡음이 공간을 통해 전파되어 장치의 개구면이나
커넥터를 통해 유입되거나 방출되는 방사성 잡음
(Radiated Noise)의 형태로 전자장치의 동작 및 성
능에 영향을 미치게 된다
. 지나친 잡음은 신호의
품질을 떨어뜨려 전자장치를 오동작 시키거나 적
용 부품의 파손을 야기하는 등 전자장치에 악영향
을 주게 되므로 적극적인 해결방법을 통해 이러한
잡음은 최소화되어야 한다
. 원칙적으로는 잡음의
원천
(Source)를 찾아서 제거하는 것이 필요하지만,
다양한 회로가 섞여 있는 전자장치에서 잡음원 그
자체를 제거한다는 것은 현실적으로 어렵다
. 그러
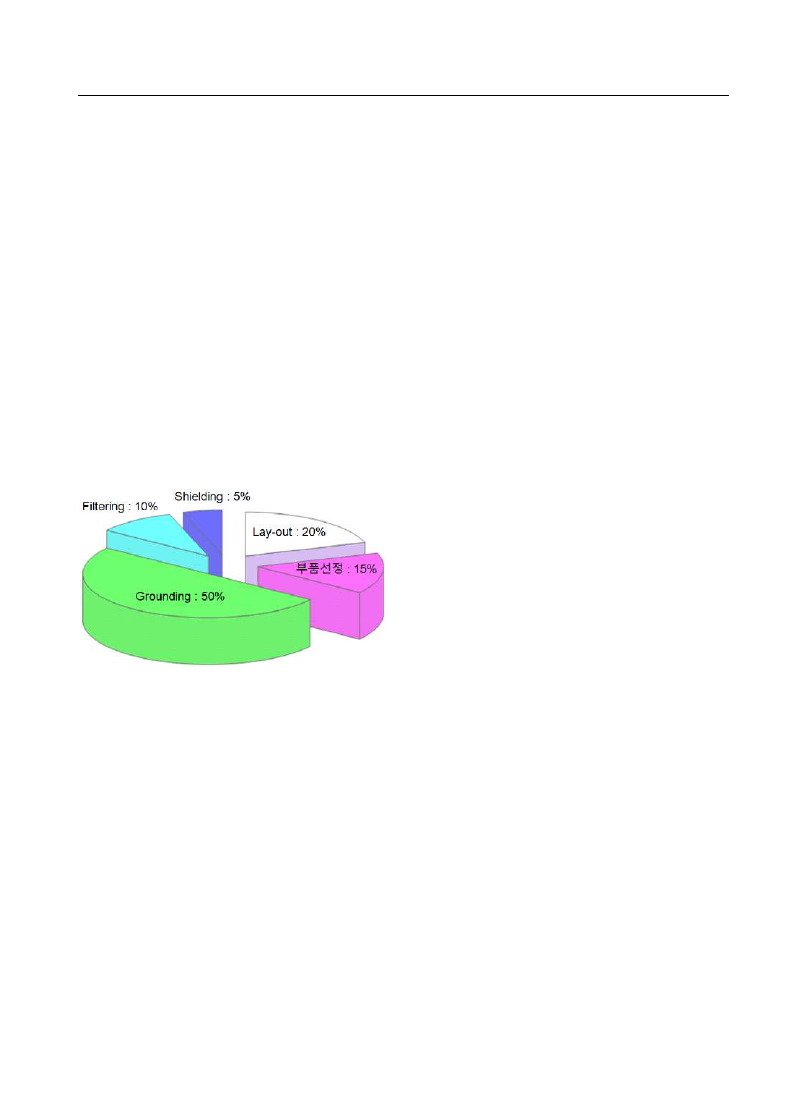
황수설 외 / 항공우주산업기술동향 14/2 (2016) pp. 77~83
79
므로
, 전자장치에 적용하는 잡음대책은 잡음을 제
거하기 보다는 발생이 예측되는 잡음을 최대한 억
제하고 제어함으로써 잡음의 확산과 전달을 최소
화하는 과정이라고 볼 수 있다
.
2.2 잡음대책 접근방법
잡음을 억제하기 위해서는 전자장치의 설계단계
에서부터 잡음 발생을 최소화하기 위한 대책이 필
요하다
. 실제 전자장치의 설계 시에는 잡음문제를
최소화하기 위해 회로의 기능별 접지
(Grounding)
분리
, 간섭을 최소화하기 위한 부품배치, 잡음 특
성이 우수한 부품선정
,
다양한 필터 적용
(Filtering), 개구면을 최소화한 기구 제작을 통한
차폐
(Shielding) 등의 방법이 적용되고 있다.
그림
1. 잡음대책의 적용빈도[3]
이와같은 전자장치의 잡음을 최소화하기 위한
접근방법은 장치의 특성과 적용목적
, 적용환경, 요
구조건 등에 따라 적용시기와 접근방법을 달리하
여 개발이 진행될 수 있다
. 잡음대책 접근방법은
크게 장치의 제작이 완료된 이후 잡음대책을 수립
하는 방법과 설계단계부터 장치가 완성되기 전에
잡음대책을 집중적으로 적용하는 방법
, 설계/제작
/조립/시험 과정에서 지속적으로 성능예측과 해석
을 적용하는 방법으로 구분할 수 있다
.
제작이 완료된 이후 전자파 환경시험을 통해 확
인된 잡음에 대해 잡음대책을 적용하는 경우 기구
물의 차폐 강화나 적용 케이블의 보강 등의 방법
이 적용될 수 있으며
, 전자파 환경이 상대적으로
열악하지 않거나 단기간에 장치를 개발하여야 하
는 경우 적용을 고려해 볼 수 있는 방법이다
. 하지
만
, 이러한 접근방법은 잡음에 대한 근본적인 원인
을 제거하기보다는 전자파 환경시험시 드러난 규
정 초과치에 대해서만 대책을 수립하게 되므로 잡
음대책의 적용이 제한적이며
, 적용 가능한 잡음대
책 방법으로 규정된 규격을 만족하지 못할 경우
보드의 재설계 및 재제작의 과정을 반복하여야하
는 경우가 발생될 수 있으므로 부수적인 개발비용
의 상승과 추가적인 개발기간이 요구되는 위험성
을 갖게 된다
.
설계단계부터 장치가 완성되기 전에 잡음대책을
집중적으로 적용하는 방법은
EMC 문제 해결에 지
나치게 접근하여 전자장치의 성능을 간과하게 되
거나
EMC 규격 만족을 위해 지나친 개발비용의
상승과 과도한 개발기간이 요구되는 단점을 가질
수 있다
.
전자장치의 잡음대책으로 설계
/제작/조립/시험
의 각 과정에서 지속적으로 성능을 예측하고 전자
장 해석 툴을 이용하여 분석된 해석결과를 적용하
는 방법이 적용될 수 있다
. 이러한 방법은 현재 전
자장치의 개발시 널리 이용되고 있는 방법으로 개
발비용이나 개발기간
, 성능규격 만족 측면에서 앞
선 방법보다 유리한 방법이라 할 수 있다
.
전자장 해석 툴을 이용한
EMC 해석은 주로 적
용 부품이 실장된
PCB의 2차원 해석을 통해 EMI
에 취약한 부분을 파악하여 잡음대책을 수립하거
나
3차원 전자장 해석 툴을 이용하여 잡음의 방사
량을 파악하여 차폐를 강화하거나 필터를 적용하
는 등의 방법을 적용하게 된다
. 이와같은 전자장
해석 툴을 적용하는 방법은
EMI 문제해결에 국한
되는 경우가 많으며
, EMS 문제의 경우 요구되는
전자파 환경에 대응할 수 있는 부품의 적용이나
차폐
, 적용 케이블의 형태변경 등의 방법으로 해결
하여야 하는 경우가 대부분이다
.
3. 전자파 간섭 해석
해석을 통한 회로기판의 잡음을 억제하는 방법
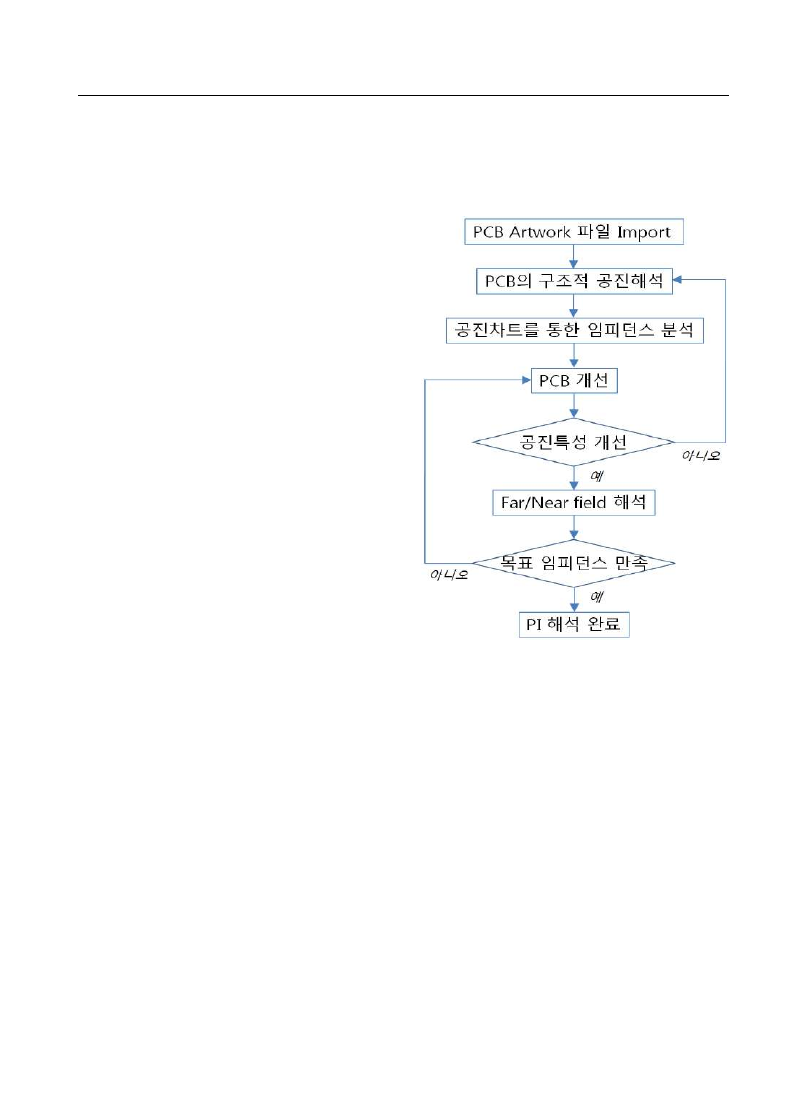
80
황수설 외 / 항공우주산업기술동향 14/2 (2016) pp. 77~83
에는 전력을 전달하는 전원단을 안정화시켜 회로
기판 자체의 불필요한 구조적인 공진을 억제하는
방법과 주요한 데이터 선로간의 간섭을 최소화하
여 불필요한 잡음의 유입을 억제하는 방법이 적용
될 수 있다
. 이와같이 회로기판의 전원단을 안정화
시키는 작업을 전원 무결성
(PI: Power Integrity)이
라 하고
, 회로기판에 배치된 적용부품 간의 연결
선로에서 발생되는 신호의 왜곡을 안정화시키는
작업을 신호 무결성
(SI: Signal Integrity)이라고 말
한다
. PI 해석을 통해서는 회로기판에 적용된 저
항
, 인덕터, 커패시터 등 수동부품의 특성값이 포
함된 회로기판의 구조적 공진과 임피던스 해석을
통해 전자파 간섭의 발생이 예측되는 문제부위를
확인할 수 있다
. SI 해석에서는 모델링된 능동부품
에 모사신호를 인가하여 선로를 통해 전달되는 신
호의 특성을
Eye 다이아그램 등을 통해 분석하게
된다
. 이러한 PI 해석과 SI 해석을 통해 회로기판
에서 발생되는 전자파 간섭의 정도와 위치를 예측
한
후
,
공진
발생이
예상되는
부위에
De-Cap.(Decoupling Capacitor)의 추가 및 De-
Cap.의 용량 조절, Via 홀의 추가 및 크기 조절,
공진부위의 패턴 수정
, 적용부품의 위치 변경 등의
방법을 통해 잡음에 의한 전자파 간섭의 영향을
최대한 억제시킬 수 있다
[4].
3.1 전자장 해석 툴을 이용한 PI 해석 과정
현재 시중에는
Ansys사의 SIwave, Cadence사의
Sigrity, EMCoS사의 EMC Studio 등 성능이 검증
되어 전자장 해석에 이용 가능한 전자장 해석 툴
이 다양하게 판매되고 있다
. 이 중 한국항공우주연
구원에서 보유하고 있는
Ansys사의 SIwave를 이
용한
PI 해석 과정은 다음과 같다.
다양한
PCB 설계 툴을 이용하여 생성된
Artwork 파일은 적용하고자 하는 전자장 해석 툴
에서 인식할 수 있는 형태로 변환되어야 한다
. 이
러한 변환 과정이 정상적으로 수행되었는지 확인
하기 위해
PCB의 재질과 층간 간격, 층간 두께 등
의 물리적 특성값을 먼저 확인하고
, 변환된
Artwork 파일의 유효성 검증을 통해 PCB 패턴상
의 결선 문제와 전기적 배선 문제 등을 확인하게
된다
.
그림
2. 전자장 해석 툴을 이용한 PI 해석 과정
유효성 검증이 완료된
PCB 파일을 이용하여 공
진해석이 진행된다
. 공진해석은 부품이 실장된
PCB의 구조적인 공진 가능성을 파악하여 공진 발
생이 예상되는 부위와 해당 주파수를 확인하는데
목적이 있다
. 공진 부위가 확인되면 이러한 공진
발생이 예상되는 부위에 위치한 주요부품에서 임
피던스를 확인하고 설정된 목표 임피던스를 만족
하도록
De-Cap.을 추가하거나 Via 홀의 추가, 패
턴 수정 등의 방법을 적용하여 공진부위가 안정화
될 때까지 해석을 반복한다
.
공진해석과 임피던스 해석결과가 반영된
PCB는
필드
(Field) 해석을 통해 보다 넓은 주파수 대역에
서의
EMI 특성을 확인하게 된다. 이와같이 전자장
해석 툴을 이용한
PI 해석은 설계된 PCB 회로기
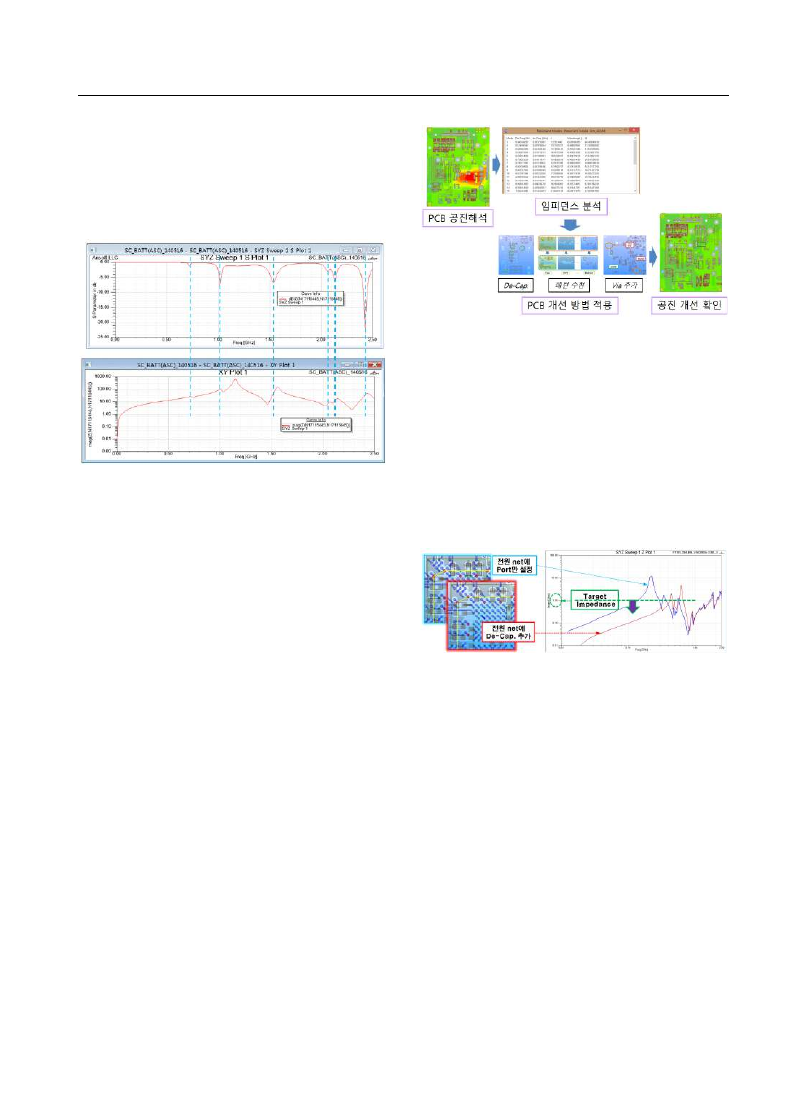
황수설 외 / 항공우주산업기술동향 14/2 (2016) pp. 77~83
81
판에서 발생될 수 있는 원치않는 신호 잡음을 회
로기판의 구조적인 공진과 배치된 부품의 특성에
의한 임피던스 해석을 통해 분석하고 안정화시키
는 작업을 통해 완성되게 된다
[5].
그림
3. 공진과 임피던스의 관계
PI 해석을 통해 확인되는 결과는 능동부품의 특
성은 고려되지 않고 설계된
PCB의 구조적인 특성
과 임의로 인가한 전류
/전압원에 의한 잡음 발생
가능성의 상대적인 비교만으로 공진 부위와 공진
주파수를 파악하여야 하는 해석상의 한계는 있으
나
, PCB 제작이 완료된 후 EMC 시험을 통해서만
확인될 수 있는
PCB 패턴의 구조적인 잡음문제를
PCB 제작 이전에 검토하여 미리 대응할 수 있다
는 장점을 가진다
.
3.2 공진해석
PCB 상의 잡음은 공진과 임피던스 개념에 기반
하여 이해하여야 한다
. 공진은 PCB 패턴의 물리적
구조와 크기에 의존하여 특정 주파수에서 에너지
가 집중되는 현상을 말한다
. 다층 구조의 PCB 상
의 공진은 전원층
(Power Plane)과 접지층(Ground
Plane) 사이에서 발생하는 모드 공진의 형태로 나
타나며
, 이러한 공진이 PCB 패턴상의 개구면이나
외곽면에서 패치 안테나와 같이 동작하여 특정 주
파수의
EMI를 유발하게 된다.
그림
4. 공진해석 및 공진개선 과정
이러한 공진이 발생하는 주파수에서는 입력 임
피던스가 크게 보이게 된다
. 입력 임피던스가 크다
는 것은 같은 잡음성 전류가 흐르는 조건에서 공
진이 발생하는 특정 부위에 더 큰 전압을 유기하
게 되므로 구조적 특성에 의해 발생된 작은 전류
잡음이 큰 전압 잡음을 발생할 수 있으므로 이러
한 부위를 확인하여 안정화 시켜야 한다
.
그림
5. De-Cap.에 의한 전원단 임피던스 개선효과
SIwave를 이용한 공진해석을 통해 PCB 패턴 상
의 공진 발생위치와 공진 주파수를 확인할 수 있
다
. 전자장 해석 툴을 이용한 EMI 최적화 작업은
설계된
PCB에 최소한의 방법을 적용하여 안정화
시키는 것으로 일반적인 경우 공진부위에
De-Cap.
을 추가하여 해당 주파수의 공진 자체를 억제하거
나 해당 공진부위에
Via 홀을 추가하여 PCB 패턴
상의 잡음성 전류가 접지를 통해 분산되도록 하여
임피던스를 낮추는 방법이 주요하게 적용된다
. 이
러한 방법으로 공진이 개선되지 않을 경우에는 공
진 발생부위의 패턴을 검토하여 잡음에 민감하지
않도록 수정하거나 민감한 패턴을
PCB 상의 다른
층으로 이동하는 방법도 적용할 수 있다
.
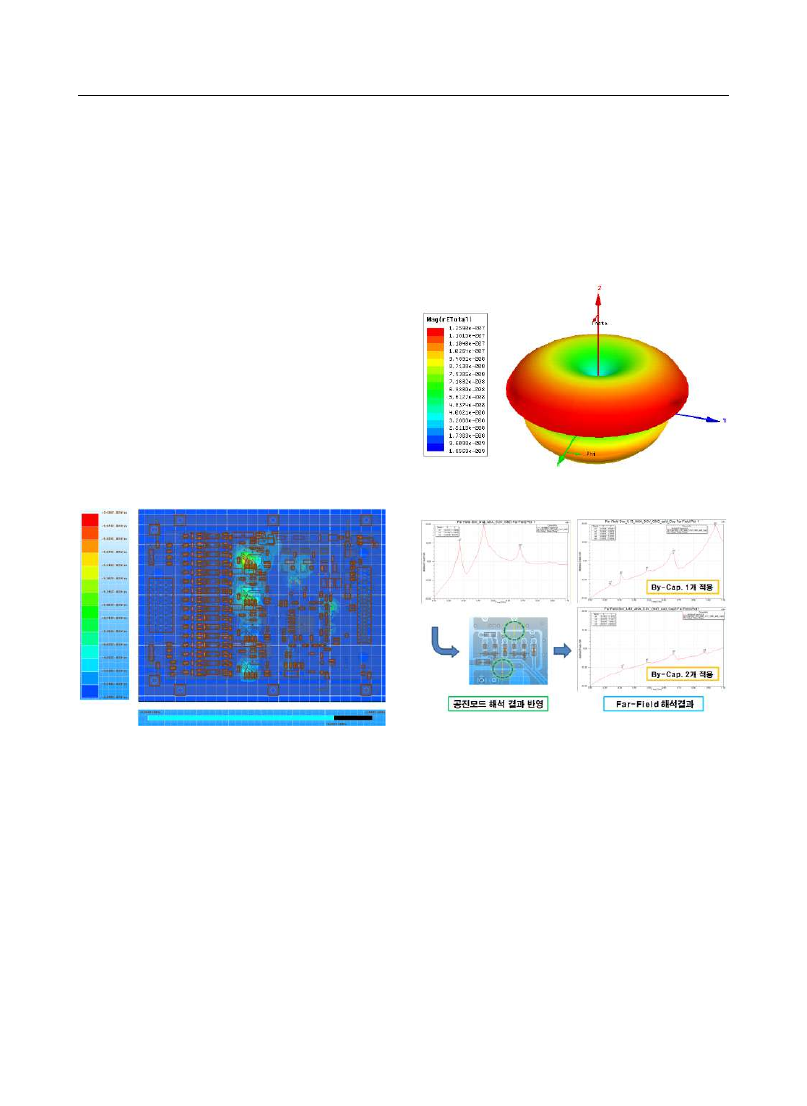
82
황수설 외 / 항공우주산업기술동향 14/2 (2016) pp. 77~83
3.3 Field 해석
공진해석은
PCB 상에서 발생되는 임피던스 변
화를 전압의 분포로 확인하는
2차원적 해석 과정
이다
. 공진해석을 통해 확인된 공진이 PCB의 구조
적 특성에 의해 특정 주파수에서 방사되는 정도를
파악하기 위해서는 필드
(Field) 해석에 의한 3차원
해석을 진행하여야 한다
. Field 해석은 PCB에서
발생되는 모드공진을
Maxwell 방정식의 결과인
E/H Field 분포로 계산하여 일정 거리에서의 EMI
방사량으로 보여준다
[6]. PCB 보드에 인접한 부분
에서 방사되는 방사량을 확인할 수 있는
Near
field 해석은 모드공진에 의한 전자파가 완전한
TEM 형태로 방사되기 이전의 특성으로 PCB 표면
에서의 전자기 분포를 보다 정확히 파악하고자 할
때 해석결과를 유용하게 활용할 수 있다
.
그림
6. Near field 해석 결과
Far field 해석은 방출되는 잡음 신호에 해당하
는 주파수보다 수십배 높은 파장의 거리에서 전자
파 방사량을 수치적으로 계산한 결과이다
. Far
field 해석은 공진해석만으로 확인할 수 없는 PCB
보드에서 발생하는
EMI 방사량을 상대적인 수치
로 확인할 수 있고
, 3차원 해석을 통해 어떤 방향
으로
EMI 방사가 주요하게 발생되는지 파악할 수
있으므로 해석결과를 바탕으로 보드 수정이나 기
구물 차폐 강화 등을 적용할 수 있다
. 일반적인 경
우
, Near field 해석의 결과는 공진해석의 결과와
유사하고 해석을 위해 보다 많은 시간이 소요되므
로
, 전자파 간섭 예측을 위해서는 Far field 해석이
보다 주요하게 수행된다
. 또한, Far field 해석의
결과는 실제
EMC 시험시 수행되는 전자파 방사
(RE: Radiated Emission) 시험과 유사한 결과를 얻
을 수 있으므로
EMC 시험전 전자장치의 EMI를
미리 예측해보는 용도로 활용될 수 있다
.
그림
7. Far field 3차원 해석 결과
그림
8. Far field 해석 과정 및 결과
4. 결 론
본 논문에서는 전자장 해석 툴인
Ansys사의
SIwave를 이용하여 회로기판의 전자파 간섭을 예
측하고 개선하는 방법에 대해 보였다
. 전자파 간섭
을 예측하기 위해서는 전자파 환경의 특성을 이해
하여야 하고
, 공진과 임피던스의 관계를 통한 잡음
의 발생 원인과 전달 경로를 파악하여야 한다
. 파
악된 잡음을 안정화시키기 위해 적용 가능한 다양
한 잡음대책을 보였고
, 전자파 간섭을 예측하기 위
한 해석과정 등을 보였다
.

황수설 외 / 항공우주산업기술동향 14/2 (2016) pp. 77~83
83
PCB에 발생되는 잡음을 억제하기 위해서는 잡
음의 발생원과 발생위치가 우선적으로 파악되어야
하며
, 확인된 잡음은 적용 가능한 잡음대책 방법을
적용하여 안정화시켜야 한다
. 다양한 회로와 부품
이 적용된
PCB의 전자파 간섭을 회로적으로 예측
하기에는 한계가 있으며
, 전자장 해석 툴을 이용한
전자파 간섭 해석을 적용하게 되면
PCB 제작 이
전에 발생되는 잡음에 대한 대책을 적용할 수 있
으므로 전자장치의 설계 및 제작시 유리하다
. 한국
항공우주연구원에서 우주발사체용으로 개발되는
전자장치는
PCB 설계시 전자장 해석 툴을 이용하
여 잡음문제를 해결하고자 접근하고 있으며
, 추후
가능한 모든 장치에 대한 전자파 간섭 해석을 수
행할 계획이다
.
참고문헌
1. Henry W. Ott, "Electromagnetic Compatibil-
ity Engineering", Wiley, 2009
2. MIL-STD-461F, "Requirement for the Control
of Electromagnetic Interference Characteristic
of Subsystems and Equipment", 2007
3. http://www.temis.co.kr
4. C. R. Paul, "Effectiveness of Multiple
Decoupling Capacitors", IEEE Trans. EMC,
Vol. 34, No. 2, pp. 130-133, May 1992
5. Ansys Co., "APDS 100 Tips", PCB PI/SI/EMI
Design Guide
6. David M, Pozar, "Microwave Engineering",
Wiley, 2005
항공우주산업기술동향 14권 2호 (2016) pp. 84~93
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
발사통제시스템 성능 개선을 위한 HPC 기술 동향
신동영*, 한유수*, 최용태
*
High Performance Computing Technical Trends to
Improve Performance of Mission Control System
Shin, Dong-Young*, Han, Yoo-Soo, Choi*, Yong-Tae*
ABSTRACT
The Mission Control System receives launch vehicle data from radar, telemetry, electro-optical
tracking system and performs coordinate transformation, filtering, extrapolation, etc. The processed
data is supplied to tracking equipments to trace launch vehicle trajectory and it is used to analyze
instantaneous impact point(IIP), impact dispersion. In KSLV-Ⅱ launch mission, Mission Control
System would be required more improved performance than legacy system. In this paper, high
performance computing technical trends are described and we suggest a method to improve
performance of mission control system.
초 록
발사통제시스템은 추적레이더
, 원격자료수신장비, 광학추적장비 등으로부터 발사체에 관한 데이터를
수신하여 좌표변환
, 필터링, 현재위치 추정 등의 처리를 수행한다. 처리된 데이터는 추적장비가 발사체
를 추적하는데 활용할 연동 데이터로 제공되며
, 비행종단 시 발사체의 낙하점, 파편의 분산 영역을 분
석하는데 사용된다
. 한국형발사체의 발사 시에는 현재 구성되어 있는 발사통제시스템보다 더 높은 처
리성능이 요구될 것으로 예측된다
. 본 논문에서는 고성능 컴퓨팅 기술동향을 살펴보고, 관련 기술을 적
용하여 발사통제시스템의 성능을 향상시킬 수 있는 방안을 제시한다
.
Key Words : High Performance Computing(고성능 컴퓨팅), Mission Control System(발사통제시스템),
Super Computer(슈퍼컴퓨터), Graphic Processing Unit(그래픽 처리 장치), Intel Xeon
Phi(인텔 제온 파이)
* 신동영, 한유수, 최용태, 한국항공우주연구원 나로우주센터 비행안전기술팀
dyshin@kari.re.kr, yshan@kari.re.kr, cytcom@kari.re.kr

신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
85
1. 서 론
발사통제시스템은 발사준비 단계에서부터 발사
체의 발사 후 추적
, 임무종료 또는 비행종단 명령
이 내려지기까지의 모든 과정을 감시하고 통제한
다
. 특히 발사통제시스템은 레이다(Radar), 원격자
료수신장비
(Telemetry), 광학추적장비(EOTS) 등으
로부터 데이터를 수신하고 필터링
, 보정 및 추정
(extrapolation), 좌표변환, 이벤트 판단 등의 처리
를 통하여 그 결과를 전시할 수 있도록 함으로써
발사체의 상태를 신속히 파악하고 그에 따른 대응
이 가능하도록 한다
.
현재 나로우주센터에 구축되어 있는 발사통제시
스템은 총
8종류 76대의 서버/클라이언트급 컴퓨
터 시스템으로 구성되어 있으며
, 향후 75t급 엔진
의 시험발사에도 사용될 예정이다
.
이처럼 다수의 서버급 컴퓨터를 도입하여 구축
된 발사통제시스템이라 할지라도 발사체의 발사과
정에서 필요한 모든 계산을 실시간으로 처리하기
에는 무리가 따른다
. 예를 들어, 발사체 혹은 그
파편들의 낙하지점은 증분속도
, 탄도계수, 양력효
과
, 바람의 영향 등을 불확실성변수로 설정하여 몬
테카를로 시뮬레이션을 통해 계산한다
. 몬테카를로
시뮬레이션을 통한 낙하지점의 예측은 매우 많은
계산량을 요구하기 때문에 낙하지점을 실시간으로
계산해야 할 경우 정확한 예측이 어려울 수 있다
.
낙하분산영역의 계산뿐만 아니라 필터링
, 추정,
좌표변환
, 3D 처리 등으로 인하여 점차 증가할 것
으로 예상되는 성능요구사항
[1]을 충족하기 위하여
발사통제시스템에 적용할 수 있는 방법은 크게 세
가지 종류가 있다
.
첫 번째 방법은 발사통제시스템을 구성하는 하
드웨어의 성능을 개선하는 방법이다
. 하드웨어의
교체를 통한 성능 향상은 비교적 간단하게 발사통
제시스템의 성능을 향상시킬 수 있다는 장점이 있
지만 추가발생비용이 다른 방법들에 비하여 많을
수 있으며
, 기존에 사용하던 시스템과의 호환성 문
제를 야기할 수 있다는 단점이 있다
.
두 번째 방법은 처리과정에 병렬처리 기법을 적
용하여 기존의 자원을 최대한 활용할 수 있도록
하는 방법이다
. 병렬처리 기법의 적용을 위하여 물
리적인 추가비용이 발생하지 않으며
, 필요할 경우
가속을 위한 하드웨어
(GPU 등)를 추가 장착하여
성능을 가속할 수 있다
. 하지만 병렬처리 기법의
적용을 위해서는 일반적인 프로그램을 작성할 때
보다 하드웨어 구조와 소프트웨어의 동작 메커니
즘을 상세히 알아야만 더 좋은 성능을 발휘하는
시스템을 구축할 수 있다는 점과 병렬성을 확보할
수 있는 부분에 한계가 있을 수 있다는 점이 단점
으로 작용할 수 있다
.
세 번째 방법은 처리하고자 하는 알고리즘을 대
체 가능하며 더 적은 자원으로 계산해 낼 수 있는
알고리즘으로 변경하는 방법이다
. 계산 자원을 더
적게 요구하는 알고리즘으로의 교체는 추가적인
비용이 들지 않는다는 점이 장점으로 작용할 수
있다
. 다만, 그러한 알고리즘을 개발하는 것이 쉽
지 않다는 점과 병렬처리를 적용하는 방법과 유사
하게 특정한 알고리즘의 처리부분에만 적용이 가
능하다는 점이 단점이 될 수 있다
.
본 논문에서는 발사통제시스템의 성능개선을 위
하여 고성능 하드웨어와 병렬처리 기법 등을 연구
하는
HPC(High Performance Computing) 분야의
최신 기술 동향 및 적용 사례들을 살펴보고 향후
발사통제시스템에 대한 적용방안을 제시한다
.
2. 본 문
2.1 HPC 기술 동향
슈퍼컴퓨터는
HPC를 대표하는 기술로서 프로세
서
, 가속기, 메모리, 네트워크, 저장장치 등의 하드
웨어 영역 이외에도 개발된 하드웨어를 효율적으
로 사용할 수 있도록 하는 운영체제
, 라이브러리,
개발환경 등을 포함한다고 할 수 있다
. 본 절에서
는 슈퍼컴퓨터와 관련된 하드웨어 개발 동향과 슈
퍼컴퓨터 혹은 기타 컴퓨터에서 사용되는 고성능
컴퓨팅을 위한 병렬처리 소프트웨어와 관련된 기
술들을 살펴보도록 한다
.
86
신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
2.1.1 HPC 하드웨어 기술 동향
CPU의 성능은 공정과 아키텍처의 발전에 따라
점차 증가하였다
. 2000년대 초반까지 CPU의 클록
(clock)과 파이프라인 깊이(pipeline depth)는 점차
증가하였다
. 하지만, 클록 속도 증가에 따른 전력
소모와 발열 문제
, 충분한 ILP (Instruction Level
Parallelism) 확보의 어려움에 따른 파이프라인 활
용 비효율성 등의 원인에 따라 인텔 코어
(Intel
Core) 마이크로아키텍처가 출시되는 2000년대 중
반부터는
CPU의 클록과 파이프라인 깊이가 큰 폭
으로 증가하지 않았다
. 반면에, 다수의 코어를 하
나의 칩에 탑재하는 멀티 코어 형식으로
CPU의
구조를 변경함으로써 병렬처리를 활용하여 프로세
서의 처리 성능을 향상시킬 수 있도록 하였으며
,
이후
CPU에 탑재되는 코어의 개수가 점차 증가하
게 되었다
.
CPU 자체의 성능 개선과는 다른 측면에서
GPU(Graphic Processing Unit) 또는 Intel Xeon
Phi와 같은 가속칩들을 활용하여 컴퓨터 시스템의
성능을 개선하는 방법들도 점차 발전하고 있다
.
CPU는 복잡한 제어와 계산 등을 수행하기 때문에
다양한 명령을 처리할 수 있는 대신 코어의 개수
가 한정적이다
. 반면에 GPU나 기타 가속기들은
단순한 연산들을 수행하는 코어가 수십 개에서 수
천 개에 이르며
, 이러한 코어들로 수행할 수 있는
부동소수점 연산
(floating-point operation)의 성능
은
CPU 대비 향상된 결과를 나타낸다. Intel CPU
의 부동소수점 연산의 성능과
NVIDIA의 GPU를
사용한 부동소수점 연산의 이론적 성능비교 그래
프를 그림
1로 나타내었다. 그림에 표시된 FLOPS
(Floating-Point Operations per Second)는 부동소
수점 연산의 성능을 나타내는 단위로서
, 1초당 수
행되는 부동소수점 연산의 개수를 나타낸다
. 2015
년도 기준으로 단정밀도
(Single Precision) 부동소
수점 연산의 경우
GPU가 CPU 대비 약 6배가량
성능이 뛰어남을 확인할 수 있으며
, 배정밀도
(Double Precision) 부동소수점 연산의 경우 GPU
가
CPU 대비 약 3.5배 성능이 뛰어남을 확인할 수
있다
.
그림
1. CPU와 GPU의 FLOPS 비교[2]
Intel의 MIC(Many Integrated Core) 아키텍처를
사용하여 처음 개발된 프로토타입 보조프로세서
(coprocessor)인 코드명 “Knights
Ferry”와
“Knights Ferry”가 발표된 이듬해인 2011년도에 발
표된
1세대 MIC
아키텍처 보조프로세서인
“Knights Corner”는 외부의 별도 카드에 장착되어
PCIe, InfiniBand 또는 Ethernet 인터페이스를 통
해
Intel Xeon Processor와 통신하도록 구성되었다.
앞서 살펴본
GPU와 유사하게 다수의 코어를 하나
의 칩에 탑재하여 병렬처리를 보조할 수 있도록
구성한 것이다
. “Knights Corner”가 Intel Xeon
Processor와 함께 구성되는 예시를 그림 2에 도시
하였다
. 프로토타입인 “Knights Ferry”나 1세대
그림
2. 1세대 Intel Xeon Phi coprocessor “Knights
Corner”[3]
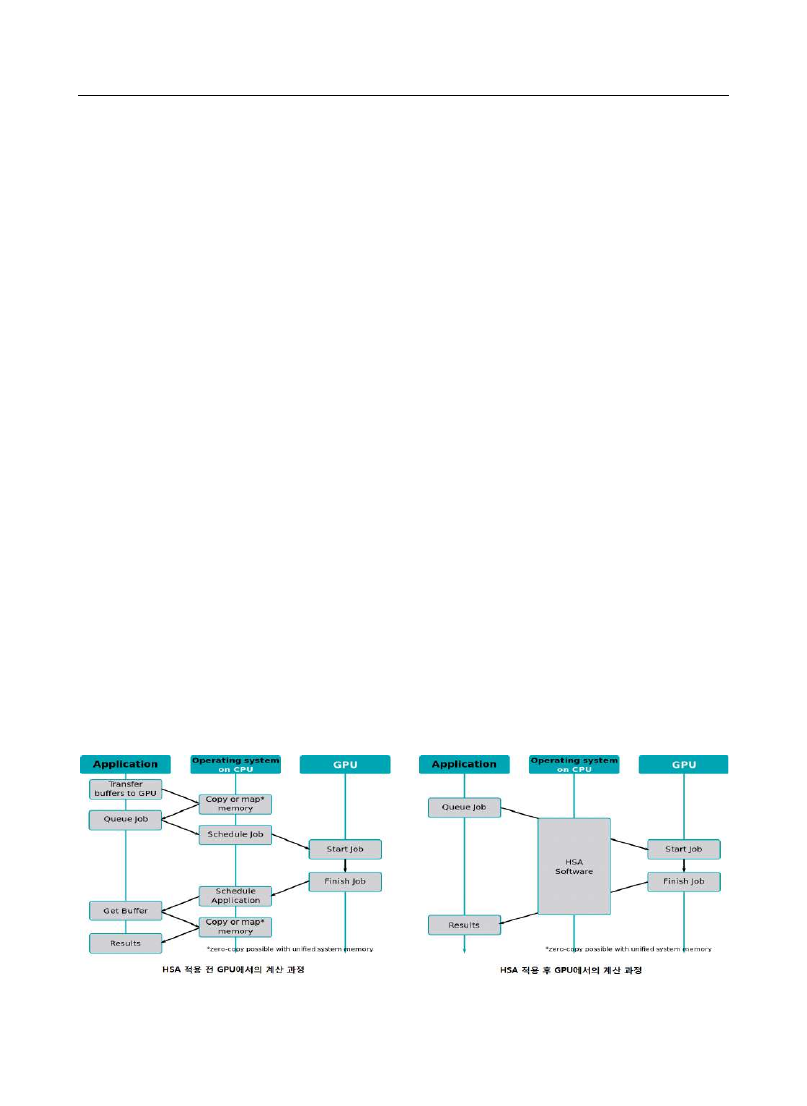
신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
87
Xeon Phi 제품인 “Knights Corner”와는 달리 2세
대
Xeon Phi 제품인 Intel Xeon Phi 7290(코드네임
“Knights Landing”)은 보조프로세서 뿐만이 아닌
독립적인 부팅이 가능한
CPU로도 사용이 가능하
도록 출시되었다
[3]. “Knights Landing”은 총 72개
의 코어를 가지며 단정밀도 부동소수점연산에서
3TFLOPS, 배정밀도 부동소수점연산에서 6TFLOPS
이상의 성능을 보인다
.
CPU와 보조프로세서들의 개발 동향으로 보았을
때
, 순차적으로 처리해야 하거나 DLP (Data Level
Parallelism)의 확보가 어려운 부분은 CPU에서 처
리하고
, DLP가 충분히 확보될 수 있는 부분들은
보조프로세서의 자원을 활용하여 처리하는 것이
효율적일 수 있다
. 이러한 개념들은 최근의 슈퍼컴
퓨터 개발 동향에도 반영되고 있음을 확인할 수
있다
. 매년 6월과 11월에 전 세계 고성능 컴퓨팅
시스템들
500대의 순위를 발표하는 TOP500에서
2012년 11월과 2013년 6월 각각 최고 성능의 컴퓨
터시스템으로 선정된 미국 오크리지국립연구소
(Oak Ridge National Laboratory)의 “Titan”과 중
국 국방과학기술대학
(National
University
of
Defense Technology)의 “Tianhe-2”는 모두 이기종
(heterogeneous)의 프로세서 및 보조프로세서를 사
용하여 구성되었다
. 이기종의 프로세서와 보조프로
세서를 활용하여 시스템을 구성하기 위해서는 개
인용 컴퓨터 등에서 흔히 볼 수 있는 단일
CPU가
모든 데이터 처리를 수행하는 구조가 아닌
, GPU,
MIC 등의 가속기들을 PCIe, infiniBand 등의 고속
인터커넥트를 이용하여
CPU와 연결하여야 한다.
이때
, 단순히 외부의 가속기 장치를 PCIe 등의 슬
롯을 활용하여 부착할 경우
(discrete GPU) 물리적
메모리가 분리되어 있기 때문에 제로카피
(Zero-copy)가 불가능하다[4]. HSA Foundation은
CPU와 보조프로세서 간 통합 가상 메모리(unified
virtual memory)를 구성함으로써 제로카피를 가능
하도록 하는
HSA(Heterogeneous System Archi-
tecture)를 제안하고 있다. HSA 시스템과 비 HSA
시스템 상에서
GPU를 활용한 계산 예시는 그림 3
에 도시되어 있다
. GPU에서 계산을 수행하기 위
해서는 어플리케이션
(유저모드) 영역에 있는 데이
터를
GPU로 복사해야 한다. HSA가 적용되지 않
은 시스템의 경우 이러한 데이터의 복사는
CPU
(커널모드)를 통해서 수행되고 이때 불필요한 메모
리 복사가 발생할 수 있다
. HSA가 적용된 시스템
의 경우 통합 가상 메모리를 활용하여 불필요한
메모리 복사를 줄일 수 있다는 장점이 있다
.
“Tianhe-2”는 이론상 최고 성능의 62.16%인
33.86PFLOPS의
린팩
벤치마크
(LINPACK
benchmark) 성능을 보이며, 16,000개의 계산 노드
로 구성되어 있다
. 각 계산 노드는 두 개의
2.2GHz Ivy Bridge architecture Intel Xeon
E5-2600 프로세서와 세 개의 1.1GHz 57코어 Intel
Xeon Phi 3100 family 가속기를 장착하고 있다[6].
이처럼 근래에는 이기종의
CPU와 가속기들을 사
그림
3. HSA(Heterogeneous System Architecture)의 적용여부에 따른 GPU에서의 계산 과정[4]
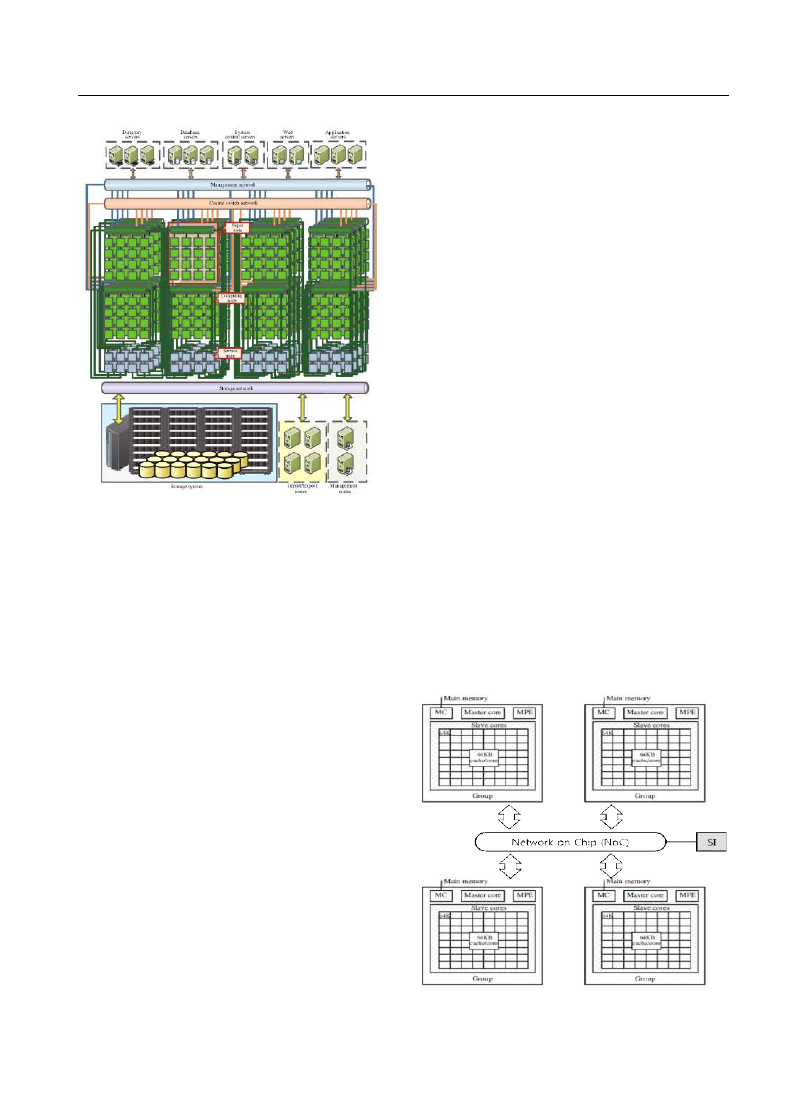
88
신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
용하여 고성능 시스템을 구축하는 것이 주목되는
추세였으나
“Tianhe-2”보다 더 뛰어난 성능으로
2016년도 6월부터 TOP500 리스트의 1위를 차지하
고 있는
“TaihuLight”은 다시 가속기가 없는 구조
를 활용하였다
.
“TaihuLight”의 이론상 최대 성능은 125PFLOPS
에 달하며 린팩 벤치마크 성능은
93PFLOPS이다.
현재 국내 최고 성능의 슈퍼컴퓨터는
TOP500 리
스트에서 각각
36위와 37위에 선정된 “미리(Miri)”
와
“누리(Nuri)”이며 두 시스템의 이론상 최대 성
능은
2.895PFLOPS,
린팩 벤치마크 성능은
2.395PFLOPS이다. 국내 최고 성능의 슈퍼컴퓨터는
현재 세계 최고의 슈퍼컴퓨터와 비교하였을 때 이
론상 성능의 약
2.3%, 린팩 벤치마크상 성능의 약
2.6%를 나타낸다.
“TaihuLight”의 아키텍처는 그림 4에 도시된 바
와
같다
.
컴퓨팅 노드
(computing
node)는
“TaihuLight”를 구성하는 기본 요소이며 하나의
컴퓨팅 노드당 하나의
CPU가 탑재된다. 256개의
컴퓨팅 노드 집합은 하나의 슈퍼 노드
(super
node)를 구성하며, 각각의 슈퍼노드들은 중앙 스위
치 네트워크
(central switch network)를 통해서 서
로 연결된다
. 또한, 4개의 슈퍼노드는 하나의 캐비
넷
(cabinet)에 탑재되며, 전체 시스템은 총 40개의
캐비넷으로 구성된다
. 관리 네트워크(management
network)는 중앙 컴퓨팅 시스템과 디렉토리, 데이
터베이스
, 시스템 컨트롤 서버 등의 관리 서버를
연결하는 역할을 수행하며
, 저장 시스템(storage
system)이나 Import/Export 노드, 관리 노드들은
스토리지 네트워크
(storage network)를 통해 중앙
컴퓨팅 시스템과 연결된다
.
“TaihuLight”의 CPU는 기존의 고성능 컴퓨팅
시스템들이 많이 사용한
Xeon E5, SPARC64,
Opteron, Power BQC 계열의 프로세서가 아닌, 중
국에서 자체 제작한
“SW26010” many-core 프로세
서이다
. 이 프로세서는 그림 5에 나타낸 바와 같이
칩 하나에 네 개의 코어그룹
(CG, Core Group)이
포함된다
. 하나의 코어그룹은 MPE(Management
Processing Element), CPE(Computing Processing
Element) 클러스터, MC(Memory Controller) 등을
포함한다
. 하나의 CPE 클러스터는 8X8 CPE로 구
성되며
, 네 개의 코어그룹은 칩 상의 네트워크
(NoC, Network on Chip)를 통하여 연결된다. 하
나의 칩은 외부 장치와의 통신을 위해 시스템 인
터페이스
(SI, System Interface)를 통해 연결된다.
그림
5. “SW26010” 프로세서 아키텍처[5]
그림
4. Sunway “TaihuLight” 아키텍처[5]

신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
89
2.1.2 HPC 소프트웨어 기술 동향
고성능 컴퓨팅 시스템은 하드웨어의 구성뿐만
아니라 구성된 하드웨어를 효율적으로 사용할 수
있도록 하는 운영체제
(operating system), 개발환
경
, 라이브러리, 컴파일러 등을 포함한다. 앞서 살
펴본
“TaihuLight”도 “SW26010” 프로세서를 활용
하기 위한
C/C++, Fortran 컴파일러와 같은 기본
컴파일러 컴포넌트들과 자동 벡터화 도구
(automatic vectorization tool), 기본 수학 라이브러
리 등을 포함하는 기본 소프트웨어를 제공한다
. 또
한
, 병렬 운영체제 환경, 병렬 프로그래밍 언어와
개발환경 등을 제공한다
.
“TaihuLight” 시스템은 병렬화를 수행하는 수준
에 따라 다른 병렬 프로그래밍 언어와 컴파일 환
경을 지원하는데
, 노드 수준에서는 일반적으로
MPI(Message Passing Interface)가 적용되며, 같은
프로세서의 코어그룹들 수준에서의 병렬화를 위해
서는
MPI 또는 OpenMP를 사용한다. 하나의 코어
그룹 내에서의 병렬화를 위해서는
OpenACC 2.0
문법을 확장한
Sunway OpenACC를 사용한다. 이
처럼 많은 고성능 컴퓨팅 시스템에서는 병렬 프로
그래밍을 위해 이미 개발되어 있는 다양한 병렬
프로그래밍 언어나 컴파일 환경을 그대로 사용하
거나 개발하는 시스템에 적합하도록 수정하여 사
용한다
. 본 절에서는 병렬프로그래밍을 위해 일반
적으로 사용되는 프로그래밍 라이브러리 및 환경
들을 살펴보도록 한다
.
가
. MPI
MPI는 Message Passing Interface의 줄임말로서
MPI Forum에서 합의하는 프로세스 간 메시지 전
달 라이브러리 표준을 의미한다
. 이 표준은 라이브
러리에서 사용할 데이터 형식이나 함수의 이름 및
인자를 정의하기는 하지만 그 구현 방법을 정의하
지는 않는다
. MPI 표준을 실제로 구현하는 오픈소
스 프로젝트로는
Open MPI가 있다[7].
MPI는 초창기에 분산 메모리 아키텍처에서의
프로세스 간 통신을 위해 설계되었으나
, 공유메
모리를
사용하는
SMP(Symmetric
Multi
Processor) 아키텍처가 사용되는 추세에 따라 여
러 물리적 아키텍처에서 동작할 수 있도록 변화
하였다
[8]. 1992년도에 MPI 표준에 대한 논의가
이루어진 후
1994년도에 MPI 1.0 버전이 배포되
었으며 최근에는
2015년 6월에 최신버전인
MPI-3.1이 배포되었다.
MPI는 서로 통신이 가능한 프로세스들의 집합
을 커뮤니케이터
(communicator)로 정의하며, 하나
의 커뮤니케이터에 속한 프로세스들은 각각의 고
유한 랭크
(rank) 값을 가진다. 예를 들어 같은 커
뮤니케이터에
n개의 프로세스가 참여할 경우 프로
세스들의 랭크는
0부터 n-1번까지 고유하게 할당
된다
. MPI에서는 이렇게 정의된 커뮤니케이터와
랭크를 바탕으로 다른 프로세스와 통신을 수행한
다
. MPI는 프로세스가 서로 통신하는 일대일
(point-to-point) 방식과 동시에 여러 개의 프로세
스가 통신하는 집합
(collective) 통신 방식을 정의한
다
. 일대일 통신을 위해 사용하는 함수의 표준 송
신
방식으로
MPI_SEND(blocking),
MPI_ISEND(non-blocking)가 있으며, 동기, 준비,
버퍼의 모드에 따라 추가적인 송신 함수가 존재한
다
.
수신
시에는
MPI_RECV(blocking),
MPI_IRECV(non-blocking)을 사용한다. 집합통신을
위해서는
MPI_BCAST,
MPI_GATHER,
MPI_SCATTER, MPI_REDUCE 등 다양한 함수가
사용된다
.
나
. OpenMP
OpenMP란 Open Multi-Processing의 줄임말로
공유메모리 다중처리 프로그래밍
API (Application
Programming Interface)이다. OpenMP API는 컴파
일러 지시어
(compiler directive), 런타임 라이브러
리
(runtime
library),
환경변수로
구성된다
.
OpenMP는 간단한 지시어만으로도 프로그램을 손
쉽게 병렬화할 수 있다는 장점이 있다
. OpenMP는
공유메모리 구조에서 실행되는 병렬처리 프로그램
의 개발을 용이하도록 하는 것이 목표이기 때문에
분산 메모리 구조 등의 비 공유메모리 구조에서
활용하기 쉽지 않다는 단점이 있다
. “TiahuLight”
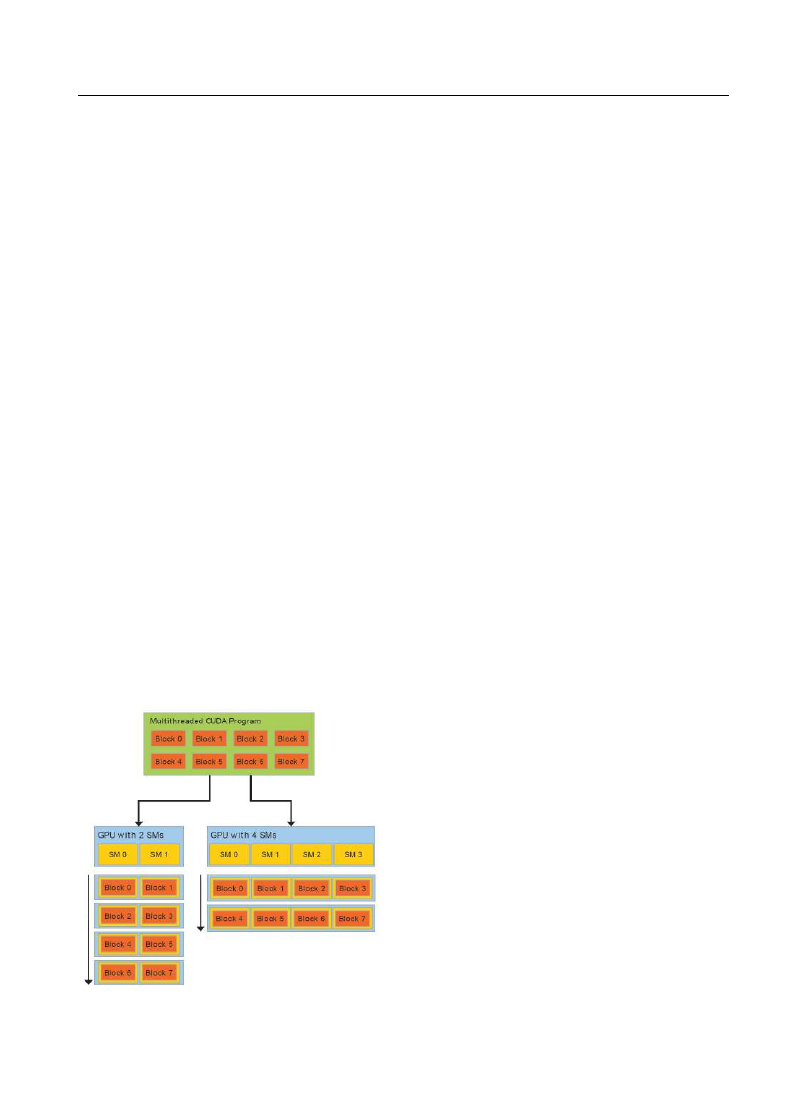
90
신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
구조에서도 하나의 프로세서 내부에서 이루어지는
코어그룹 사이에서의 병렬화를 위해서는
OpenMP
를 사용하지만 노드 수준의 병렬화를 위해서는
MPI를 사용하는 것을 확인할 수 있다.
다
. CUDA
CUDA는 Compute Unified Device Architecture
를 뜻하는 말이며
, NVIDIA GPU를 병렬 컴퓨팅에
사용할 수 있도록 해주는 범용 병렬 컴퓨팅 플랫
폼으로써
2006년도에 처음 소개되었다. CUDA는
NVIDIA에서 출시되는 GeForce, Quadro, Tesla 시
리즈의
GPU를
GPGPU(General
Purpose
computing on Graphics Processing Units)에 사용
하는 것을 가능하도록 하며
, C언어의 확장 형태
프로그래밍 언어를 사용하기 때문에 프로그래머가
상대적으로 쉽게 병렬 프로그래밍을 할 수 있도록
한다
. 또한, 그림 6에 나타낸 바와 같이 scalable
프로그래밍 모델을 지원하여 독립적으로 수행 가
능한 쓰레드들을 블록으로 나누고 각 블록은 하드
웨어에 존재하는 스트리밍 멀티프로세서
(SM,
Streaming Multiprocessor)의 개수에 따라 자동으
로 블록들을 나누어 수행하도록 함으로써 프로그
래머가 하드웨어에 탑재된 멀티프로세서의 개수에
서 상대적으로 자유롭게 프로그램을 작성할 수 있
도록 하였다
. 하지만 CUDA는 NIVIDA GPU 제품
을 활용하는데 그 용도가 제한된다는 단점이 있으
며
,
NVIDIA가 OpenCL (Open Computing
Language) 프로젝트에도 참여하고 있기 때문에 향
후
CUDA가 어떤 방향으로 발전할지 귀추가 주목
된다
.
2.2 해외 활용 사례
2.2.1 미국 (NASA)
미국의
NASA(National Aeronautics and Space
Administration)는 TOP500리스트에 포함되는 슈퍼
컴퓨터를
2종류 보유하고 있다. 그 중 하나는
“Pleiades”이며 에임즈연구센터(Ames Research
Center)의
NAS(NASA
Advanced
Supercomputing)
부문에서
수행하는
HECC(High-End Computing Capability) 프로젝트
를 위해 구축되었다
. 다양한 마이크로아키텍처의
Intel Xeon 프로세서를 사용하였으며, 가속기 또한
NVIDIA Testla K40, Intel Xeon Phi 5110p를 동시
에 사용하였다
. Pleiades는 NASA 유관기관의 연구
들을 지원하고 있으며
, 대규모 공기역학 계산 등의
전산유체역학
[9][10], 열대기후 예측[11], 발사체 안
정성 분석
[12] 등의 분야에 활용되고 있다. 다른
한 종류의 슈퍼컴퓨터는
“Discover”라 불리며,
“Discover”는 계산 유닛을 추가함으로써 성능 업
그레이드가
가능한
구조를
가지고
있다
.
NCCS(NASA Center for Climate Simulation)는
기존의
“SCU10” 유닛과 동일한 하드웨어를
“Discover”에 추가함으로써 “Discover”의 성능을
업그레이드 하였다
. “Discover”는 9번부터 13번까
지의 유닛을 연결하여 총
3.478PFLOPS의 이론상
성능을 보유하고 있으며
, 주로 NASA 센터나 연구
소
, 대학들의 날씨와 기후 연구를 돕는데 사용되고
있다
.
2.2.2 일본 (JAXA)
일본의
JAXA는 JSS2(JAXA Supercomputer
System Generation 2)라는 슈퍼컴퓨팅 시스템을
그림
6. Automatic Scalability[2]

신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
91
보유하고 있다
. JSS2는 “SORA”와 “J-SPACE”라는
시스템으로 구성되어 있으며
, “SORA”는 컴퓨팅
자원을 제공하는 시스템
, “J-SPACE”는 데이터 저
장 시스템이다
. “SORA”는 총 3단계에 거쳐 구축
이 되었으며
, 2014년 10월 55.8TFLOPS 성능
(Pre-Post System, Login System, Large Memory
System)을
구축한데
이어
,
2015년
4월
1.31PFPLOPS의 메인 시스템을 추가 구축하였다.
마지막
3단계는 2016년 4월에 완료 되었으며, 3단
계 완료 후
“SORA”는 메인 시스템의 성능을
3.49PFLOPS로 업그레이드하였다. “J-SPACE”는
0.7PB의 디스크 저장소와 20PB의 테이프 미디어로
구성되어 있다
.
JSS2는 엡실론(Epsilon) 발사체의 수치 시뮬레이
션
,
아음속에서의 재진입 캡슐의 비정상류
(unsteady flow) 분석, LE-X 엔진의 수치 시뮬레이
션 등에 활용되고 있다
.
2.2.3 인도 (ISRO)
인도의 국가우주개발기구인
ISRO(Indian Space
Research
Organization)는
슈퍼컴퓨터
“SAGA-220(Supercomputer or Aerospace with
GPU Architecture-220 TFLOPS)”를 보유하고 있으
며
, 주로 발사체의 CFD(Computational Fluid
Dynamics)와
관련하여
사용되고
있다
.
“SAGA-220”은 400개의 Intel Quad Core Xeon
CPU와 400개의 NVIDIA Tesla C2070 GPU로 구
성되어 있으며 이론상 최고성능은
394.76TFLOPS
이다
. “SAGA-220”은 TOP500 리스트에 2015년 6
월
422위로 기록되어 있었으나 현재는 순위에 포
함되어 있지 않다
.
2.3 나로우주센터 발사통제시스템
발사통제시스템은 레이다
(Radar), 원격자료수신
장비
(Telemetry), 광학추적장비(EOTS) 등으로부터
발사체에 관한 정보를 취득하여 처리하고 전시하
는 기능을 담당한다
. 발사통제시스템은 8종류 76대
의 서버
/클라이언트급 컴퓨터로 구성된다. 대표적
인 서브시스템으로는 미션상태전시시스템
(MSDS),
비행정보중앙처리시스템
(CDPS), 미션정보분배시스
템
(MDDS), 비행정보시뮬레이션시스템(STS), 비행
안전정보시스템
(FSIS),
원격수신자료전시시스템
(EDS), 비행정보전시시스템(MEDS), 표준시각제어
시스템
(TCS) 등이 있다. 이 중 CDPS는 레이다, 광
학추적장비
, 원격자료수신장비의 데이터를 취득하
여 좌표를 변환하고 추적 필터를 적용하며 외삽을
통한 현재위치 추정을 수행한다
. 이렇게 계산된 발
사체의 현재 위치는 추적장비들이 발사체를 추적
하는데 사용하도록 추적 연동 데이터
(slaving data)
로 분배 된다
. 이러한 CDPS의 처리기능에 고성능
컴퓨팅 기술을 적용하여 성능을 개선하는 것이 가
능하다
. 예를 들어, 좌표계 변환의 경우 하나의 좌
표를
3차원 행벡터로 나타낸다고 가정하였을 때,
각 요소는 삼각함수의 곱 연산 등에 의하여 다른
좌표계의 좌표로 변환될 수 있다
. 이때, 각 요소의
연산은 다른 요소에 의존적이지 않으므로 별도의
프로세스나 쓰레드를 구성하여 수행함으로써 성능
을 개선할 수 있는 가능성이 존재한다
. 이러한 연
산에는
OpenMP 등을 활용한 기법이 우선적으로
적용될 수 있는데
, 그 이유는 GPU 등의 가속기
를 사용할 경우 발생할 수 있는 데이터 복사
, 쓰레
드 블록 제어 오버헤드들이 성능개선 효과를 저해
할 수 있기 때문이다
.
발사통제시스템의
FSIS는
CDPS로부터
TSPI(Time, Space, Position Information)를 취득하
며 원격자료수신장비로부터 발사체 관련 데이터를
수신한다
. 이러한 정보들을 바탕으로 낙하점 및 낙
하분산영역을 예측하여 도시함으로써 발사체의 이
상비행에 따른 피해가 발생하지 않도록 한다
. FSIS
에서 낙하점 및 파편 분산 영역의 실시간 분석을
위하여 몬테카를로 시뮬레이션을 수행하고자 할
경우
, 고성능 컴퓨팅 기술 중 가속기를 활용한 성
능개선이 우선적으로 고려될 수 있다
. 몬테카를로
시뮬레이션은 불확실성변수에 대한 다수의 시뮬레
이션을 반복적으로 수행하는데
, CPU가 가진 제한
적 개수의 코어를 활용하는 것은 성능 한계가 있
으며
, CPU보다 월등히 많은 수의 코어를 가진 가

92
신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
속기를 활용하여 시뮬레이션을 병렬적으로 수행함
으로써 수행시간을 단축할 수 있다
. 이러한 경우
충분한
DLP 확보가 가능하기 때문에 CDPS의 좌
표변환 연산에서와 동일한 오버헤드가 발생한다
하더라도 가속기에 의하여 처리된 연산들의 성능
개선 폭이 오버헤드에 의한 지연을 상쇄시킬 수
있다
.
발사통제시스템의
EDS와 MEDS는 발사체의 궤
적 및 상태 정보를 전시하는 역할을 수행하며
EDS는 텍스트 데이터와 그래프 등의 형태로,
MEDS는 지도상에 표시되는 발사체의 위치정보
형태로 전시를 수행한다
. 현재 시스템은 52개의 1
단 정보와
192개의 2단 정보를 전시하고 있으며,
전시 주기는
2Hz이다. 이러한 정보들은 한국형발
사체
(KSLV-Ⅱ)의 발사 시에는 더욱 증가할 것으로
예상되며
EDS 및 MEDS 전시 주기 및 지도 정보
전시 부하 역시 더 늘어날 것으로 예상되고 있다
[1]. EDS, MEDS를 통하여 전시될 데이터들 또한
그 개수는 증가할 것으로 예상되나
, 가속기를 통하
여 성능을 개선하는 방식을 적용하는 것은 적절하
지 않을 것으로 판단된다
. 가속기를 적용할 경우
대량의 데이터를 동시에 계산할 수 있어야 효율이
증대되는데
, EDS나 MEDS에서 처리하는 데이터는
표시 형태의 변환이나 스케일링
(scaling) 등의 연산
이 주를 이룰 것으로 예상되며 이러한 연산들은
소량의 처리가 빠른 주기로 발생하기 때문에 처리
할 데이터를 외부의 가속기로 복사해야 하는 구조
(discrete GPU 구조)에 적합하지 않다. 따라서
EDS나 MEDS는 MPI 등을 활용하여 여러 개의 프
로세스나 쓰레드를 생성하고 각각의 프로세스나
쓰레드가 계산을 분할하여 수행하도록 하는 방식
을 적용하는 것이 더 효율적일 것으로 예상된다
.
3. 결 론
한국형발사체
(KSLV-Ⅱ)의 발사 시에는 현재 구
축되어 있는 발사통제시스템보다 더 많은 성능 요
구사항이 발생할 것으로 예상된다
. 세계 각국의 고
성능 컴퓨팅 시스템 활용 사례를 살펴보았을 때
,
발사통제시스템만을 위한 고성능 컴퓨팅 시스템은
아직까지 필요하지 않을 것으로 판단된다
. 다만,
CDPS의 좌표계 변환부터, FSIS에서 수행될 낙하점
및 파편 분산 영역의 계산
, EDS 및 MEDS에서 수
행될 스케일링 연산 등 발사통제시스템에 고성능
컴퓨팅 기술이 적용될 수 있는 부분은 존재할 것
으로 판단된다
. 하드웨어적인 가속기를 추가하여
다수의 코어를 확보하고 데이터를 병렬적으로 처
리하는 방법들은
DLP가 높고 다량의 데이터를 동
시에 처리해야 하는
FSIS관련 연산에 적용될 수
있을 것으로 보이며
, CDPS의 좌표변환 연산 등과
같이 데이터 복사
, 쓰레드 생성 등의 오버헤드보다
가속기를 사용한 병렬처리가 큰 이득이 없을 것으
로 예상되는 경우에는
OpenMP 등의 소프트웨어
적 기법을 도입하여
CPU 수준에서 병렬처리를 가
능하도록 함으로써 저렴한 비용으로 발사통제시스
템의 성능향상을 도모할 수 있을 것으로 판단된다
.
참고문헌
1. 최경준, 최용태, 오창열, "발사통제시스템
성능향상을 위한 병렬 프로그래밍 라이브러리
기술 동향
", 항공우주산업기술동향, 제10권,
제
1호, 2012, pp.145-153
2. NVIDIA, "CUDA C PROGRAMMING
GUIDE", NVIDIA, 2016, pp.2
3. A. Sodani, "Knights landing (KNL): 2nd
Generation Intel® Xeon Phi processor", 2015
IEEE Hot Chips 27 Symposium (HCS), 2015,
pp. 1-24
4. https://en.wikipedia.org/wiki/Heterogeneous_
System_Architecture
5. Fu, H., Liao, J., Yang, J., Wang, L., Song, Z.,
Huang, X., Yang, C., Xue, W., Liu, F., Qiao,
F., Zhao, W., Yin, X., Hou, C., Zhang, C., Ge,
W., Zhang, J., Wang, Y., Zhou, C., Yang, G.,
"The Sunway TaihuLight supercomputer:

신동영 외 / 항공우주산업기술동향 14/2 (2016) pp. 84~93
93
system and applications", Science China
Information Sciences, vol.59, no.7, 2016,
pp.072001:1-072001:16
6. Liao, Xiangke, et al., "MilkyWay-2
supercomputer: system and application",
Frontiers of Computer Science, vol.8, no.3,
2014, pp.345-356
7. https://www.open-mpi.org/
8. https://computing.llnl.gov/tutorials/mpi/
9. Pulliam, T. H., Jespesen, D. C., “Large scale
aerodynamic calculation on Pleiades”, Parallel
Computational Fluid Dynamics: Recent
Advances and Future Directions, 2010,
pp.124-131
10. Djomehri, J., Jespersen, D., Taft, J., Jin, H.,
Hood, R., “Performance of CFD applications
on NASA supercomputers”, Parallel
Computational Fluid Dynamics: Recent
Advances and Future Directions, 2010,
pp.403~413
11. Shen, B. W., Tao, W. K., & Green, B.,
“Coupling advanced modeling and
visualization to improve high-impact tropical
weather prediction”, Computing in Science &
Engineering, vol.13, no.5, 2011, pp.56-67.
12. Guruswamy, G. P., “Large-Scale
Computations for Stability Analysis of
Launch Vehicles Using Cluster Computers“
Journal of Spacecraft and Rockets, vol.48,
no.4, 2011, pp.584-588
항공우주산업기술동향 14권 2호 (2016) pp. 94~98
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
위성 운영 궤도 데이터 양식의 국제 표준화 동향
정옥철*, 김화영*, 성재동*, 안상일*1)
International Standard Format of Orbit Data for
Satellite Mission Operations
Okchul Jung*, Hwayeong Kim*, Jaedong Seong*, Sangil Ahn*
ABSTRACT
The standardization of the orbit data for satellite operations is analyzed in this paper. The set of
orbit-related data messages defined by the Consultative Committee for Space Data Systems (CCSDS)
is the baseline concept for trajectory representation in data interchange applications, which are
cross-supported between agencies. The format, application, and examples of the orbit-related data
messages including the Orbit Parameter Message, the Orbit Mean-Elements Message, the Orbit
Ephemeris Message, the Conjunction Data Message, and the Tracking Data Message are introduced
and analyzed. In order to support international cooperation and inter-operability in satellite
operations and orbit data exchange in the near future, the standard format of orbit data should be
well-prepared in accordance with the relevant recommendations.
초 록
본 논문에서는 위성 운영 시에 여러 기관 간에 교환할 수 있는 궤도 데이터 양식의 표준화 현황을
분석하였다
. 궤도 데이터 표준화는 우주 관련 정보의 상호 교환을 촉진할 목적으로 데이터 표준 개발
에 참여한 기관의 국제 조직인 우주 데이터 시스템 자문 위원회
(CCSDS)에서 작성, 배포하고 있다. 본
논문에서는 표준 데이터로 사용되고 있는 궤도 파라미터 메시지
, 평균궤도 메시지, 시간에 따른 궤도
메시지
, 근접정보 메시지, 위성추적 메시지의 특징 및 활용 방안을 분석하였다. 향후 위성운영 분야의
국제협력 다변화 등을 고려할 때 중장기적으로 궤도데이터 표준화 등이 더욱 강조될 것으로 예상됨에
따라 이에 대한 대비가 필요할 것으로 판단된다
.
Key Words : Satellite Mission Operations(위성 임무 운영), Standardization(표준화), Orbit(궤도),
Conjunction(근접), Tracking(추적)
* 정옥철, 김화영, 성재동, 안상일, 한국항공우주연구원, 국가위성정보활용지원센터 저궤도위성관제팀
ocjung@kari.re.kr, hykim@kari.re.kr, acestars@kari.re.kr, siahn@kari.re.kr
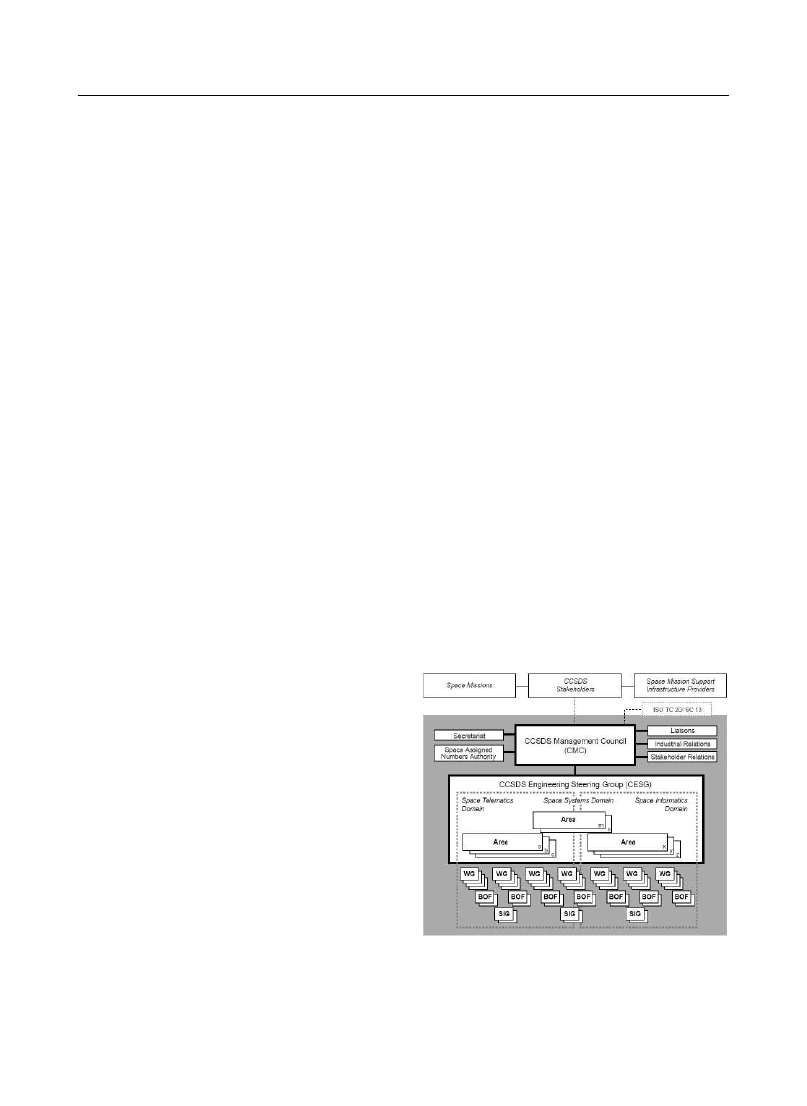
정옥철 외 / 항공우주산업기술동향 14/2 (2016) pp. 94~98
95
1. 서 론
위성 운영에 있어 서로 다른 모듈
, 컴포넌트, 서
브시스템
, 그리고 시스템 간에는 여러 가지 형태의
데이터 인터페이스가 있을 수 있는데
, 약속된 데이
터 포맷을 서로 지키기 위해서는
Interface Control
Document(ICD)가 작성되어야 한다. 시간에 따른
위성의 위치 및 속도를 나타내는 궤도 데이터 역
시 주는 쪽과 받는 쪽에서 정확한 양식
(Format)을
서로 이해하고 있어야 주고받은 데이터를 이용하
여 정확한 해석 및 활용이 가능하다
. 예를 들어,
발사장에서 추정한 위성의 궤도 정보는 관제센터
로 전달되어 사용되고 있고
, 다른 기관에서 위성을
추적하기 위한 초기 궤도정보와 추적 결과데이터
도 많이 교환되고 있다
. 최근 들어서는 위성 충돌
위험과 관련한 데이터도 널리 사용되고 있다
. 또
한
, 주요 위성운영기관을 중심으로 상호 운영호환
성
(Inter-operability) 또는 표준화를 위한 노력을
고려할 때
, 궤도 데이터 양식의 표준화는 가장 기
본적인 요소라 할 수 있다
. 이를 위해서는 궤도정
보를 표현하는 파라미터의 의미 및 단위
(Unit), 시
간계
(Time System) 및 좌표계(Coordinate System)
등이 사전에 명확하게 정의되어야 한다
. 본 논문에
서는 우주 데이터 시스템 자문 위원회
(CCSDS)의
조직 구성
, 역할, 표준 문서체계 등을 살펴보았고,
특히 위성 운영과 관련하여 궤도 데이터 양식의
표준화 현황에 대하여 분석하였다
.
2. 본 문
2.1 CCSDS
우주 데이터 시스템 자문 위원회
(CCSDS,
Consultative Committee for Space Data Systems)
는 우주 관련 정보의 상호 교환을 촉진할 목적으
로 데이터 표준 개발에 참여한 우주 기관의 국제
조직이다
. 이 위원회는 1982년에 설립되었고, 구성
은 회원
(Member) 기관, 옵저버(Observer) 기관,
산업체 준회원으로 구성되어 있으며
2016년 10월
현재
11개의 회원 기관(이탈리아, 캐나다, 프랑스,
중국
, 독일, 유럽우주청, 러시아, 브라질, 일본, 미
국
, 영국), 30개의 옵저버 기관, 그리고 113개의
산업체 및 기타 기관이 참여하고 있다
[1,2]. 현재,
한국항공우주연구원은 옵저버 기관에 소속되어
활동하고 있다
. <그림 1>은 CCSDS의 전체 조직
구성을 나타낸 것으로
, 전체적인 운영을 관장하는
CCSDS Management Council (CMC, Member
Agency 대표단으로 구성)과 기술적인 관리, 국제
표준 조율 등을 담당하는
CCSDS Engineering
Steering Group (CESG), 그리고 기술적 실무를
담당하는
Working Group(WG)으로 구분된다.
Working Group은 아래와 같이 5개의 Area로 구
성되어 있으며
, 각 분야 간의 관계는 <그림 2>에
나타내었다
.
- Space Internetworking Services
- Mission Operations and Information
Management Services
- Spacecraft Onboard Interface Services
- System Engineering
- Cross Support Services
- Space Link Services
그림
1. CCSDS 조직 구성도
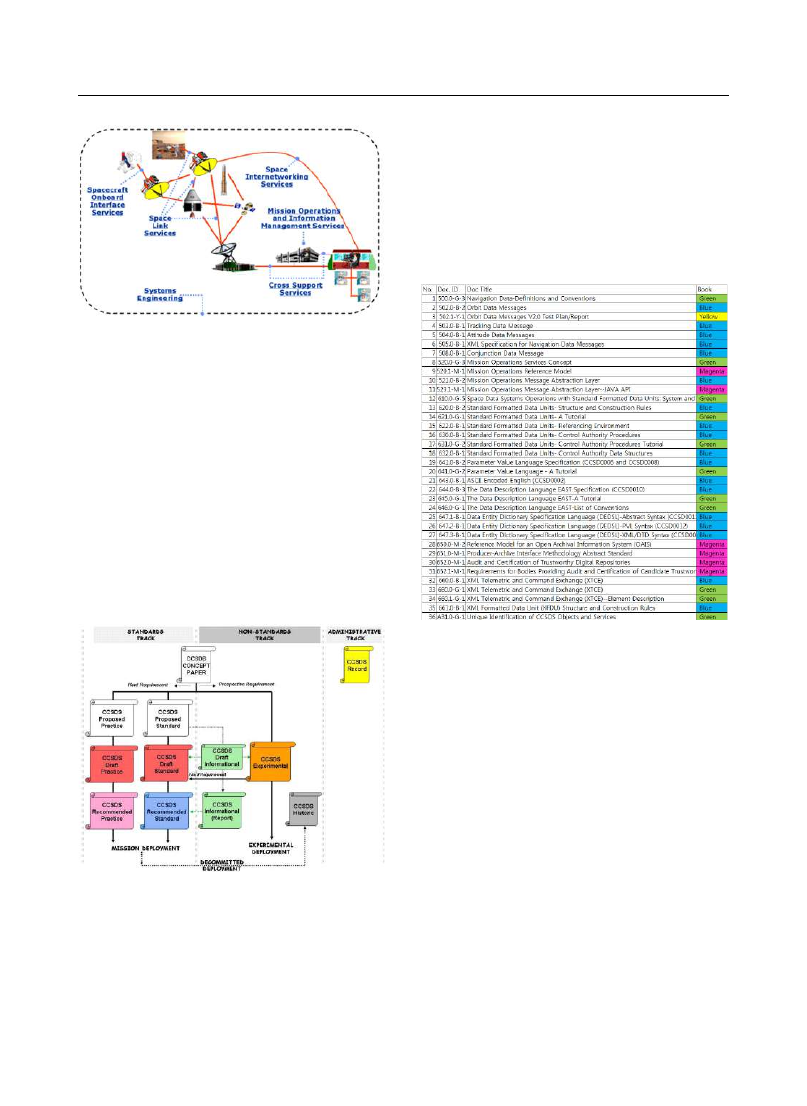
96
정옥철 외 / 항공우주산업기술동향 14/2 (2016) pp. 94~98
그림
2. CCSDS Working Group 연관도
CCSDS에서 발행하는 문서는 크게 6가지로 구
분되며 각각의 속성은 아래와 같다
. <그림 3>은
CCSDS 문서 체계를 도시한 것이다.
- Blue: Recommended Standards
- Magenta: Recommended Practices
- Green: Informational Reports
- Orange: Experimental
- Yellow: Record
- Silver: Historical
그림
3. CCSDS 문서 체계
본 논문에서 다루고 있는 궤도데이터 표준은
Mission Operations & Information Management
Service (MOIMS)에 해당된다. 이 분야에서는 위성
및 지상국 운영에 있어 적용 가능한 표준화 및 절
차를 통해 임무운영
(mission operations)이나 임무
활용
(mission utilization) 간의 관련 정보 전달을
최대한 원활하게 하는 것을 목적으로 하고 있다
.
이 분야에서 현재까지 발간된 문서는 총
36건으로
전체 리스트는
<그림 4>에 정리하였고, 색상은
CCSDS 문서체계를 따른다.
그림
4. MOIMS 분야 문서 현황
2.2 궤도 데이터 표준 분석
우주 분야의 국제협력이 활발해 짐에 따라 위성
운영 시 궤도 데이터를 서로 다른 기관끼리 서로
주고 받는 경우가 빈번해졌다
. 궤도 데이터 인터페
이스는 주로 아래의 필요에 따라 이루어진다
.
- 위성 추적/항법 지원을 위한 발사 전 계획
- 위성 추적을 위한 스케줄링
- 위성 추적
- 궤도 데이터 비교 및 분석
- 궤도 전파와 같은 위치 파악
- 위성 간의 물리적, 전자기적 간섭 해석
- 충돌회피 연구
- 궤도조정 협력 운영
정옥철 외 / 항공우주산업기술동향 14/2 (2016) pp. 94~98
97
2.2.1 Orbit Data Message
CCSDS에서는 궤도 데이터(ODM, Orbit Data
Message)를 아래와 같이 3가지 형태로 구분하여
각각의 표준 양식을 제시하고 있다
. 2016년 10월
현재 각
Message의 버전은 2.0버전이 최신이다
[3,4].
- OPM: Orbit Parameter Message
- OMM: Orbit Mean-Element Message
- OEM: Orbit Ephemeris Message
첫째
, OPM(Orbit Parameter Message)은 특정
기산시점
(Epoch)에 위성의 위치 및 속도를 나타내
는 것으로
, 흔히 위성(궤도)의 순간 상태벡터
(Osculating State Vector)를 주고받을 때 사용된다.
OPM 데이터를 받으면 원하는 시점에 궤도를 계산
해야 하므로 궤도전파기가 필요하게 되는데
, 궤도
전파의 정밀도를 높이기 위하여 위성의 질량
, 면
적
, 공분산 정보도 <그림 5>에 나타낸 바와 같이
선택적으로
OPM에 추가될 수 있다. 또한, 가능하
다면 궤도전파 모델링
, 교란력 정보 등이 OPM을
주고받은 기관 간에 동일할 경우 가장 높은 정밀
도가 보장된다
.
둘째
, OMM(Orbit Mean-Element Message)은
TLE(Two-Line Element) 형태의 평균궤도 데이터
를 표준화한 것으로
, TLE 포맷으로 변환도 쉽게
가능하다
. OMM의 구조 역시 OPM과 동일하게 헤
더
, 메타데이터, 데이터, 코멘트(선택사항)으로 구
분된다
.
셋째
, OEM(Orbit Ephemeris Message)은 시간에
따른 위치 및 속도를 나타내는 것으로
, 필요 시 가
속도도 포함시킬 수 있다
. OEM 파일의 구성은 헤
더
, 메타데이터, Ephemeris 데이터, 공분산 행렬(선
택사항
) 및 코멘트(선택사항)으로 구분된다.
위에 나타낸 궤도 데이터의 구성은 헤더
, 메타
데이터
, 데이터, 코멘트(선택사항)으로 구분되며,
파일 포맷은
ASCII 텍스트 포맷을 추천하고 있다.
현재에는 각 파일이 하나의 위성을 나타내지만
, 향
후에는 여러 개의 위성을 한 파일에 같이 나타내
는 방안도 고려중인 것으로 알려져 있다
.
CCSDS_OPM_VERS = 2.0
COMMENT Generated by GSOC, R. Kiehling
CREATION_DATE = 2000-06-03T05:33:00.000
ORIGINATOR = GSOC
OBJECT_NAME = EUTELSAT W4
OBJECT_ID = 2000-028A
CENTER_NAME = EARTH
REF_FRAME = TOD
TIME_SYSTEM = UTC
COMMENT State Vector
EPOCH = 2006-06-03T00:00:00.000
X = 6655.9942 [km]
Y = -40218.5751 [km]
Z = -82.9177 [km]
X_DOT = 3.11548208 [km/s]
Y_DOT = 0.47042605 [km/s]
Z_DOT = -0.00101495 [km/s]
COMMENT Keplerian elements
SEMI_MAJOR_AXIS = 41399.5123 [km]
ECCENTRICITY = 0.020842611
INCLINATION = 0.117746 [deg]
RA_OF_ASC_NODE = 17.604721 [deg]
ARG_OF_PERICENTER = 218.242943 [deg]
TRUE_ANOMALY = 41.922339 [deg]
GM = 398600.4415 [km**3/s**2]
COMMENT Spacecraft parameters
MASS = 1913.000 [kg]
SOLAR_RAD_AREA = 10.000 [m**2]
SOLAR_RAD_COEFF = 1.300
DRAG_AREA = 10.000 [m**2]
DRAG_COEFF = 2.300
COV_REF_FRAME = RTN
CX_X = 3.331349476038534e-04
CY_X = 4.618927349220216e-04
CY_Y = 6.782421679971363e-04
CZ_X = -3.070007847730449e-04
CZ_Y = -4.221234189514228e-04
CZ_Z = 3.231931992380369e-04
COMMENT impulsive, thrust direction fixed in RTN frame
MAN_EPOCH_IGNITION = 2006-06-03T18:59:21.0
MAN_DURATION = 0.00 [s]
MAN_DELTA_MASS = -1.469 [kg]
MAN_REF_FRAME = RTN
MAN_DV_1 = 0.00101500 [km/s]
MAN_DV_2 = -0.00187300 [km/s]
MAN_DV_3 = 0.00000000 [km/s]
그림
5. Orbit Parameter Message 예시

98
정옥철 외 / 항공우주산업기술동향 14/2 (2016) pp. 94~98
2.2.2 Conjunction Data Message
CDM(Conjunction Data Message)는 우주 공간
상 우주물체
(위성 및 우주파편 포함) 간의 근접 정
보를 교환하기 위한 것으로
, 이 메시지에는 두 물
체 간의 근접거리와 충돌확률
, 최소근접시간에서
두 물체의 위치 및 속도
, 공분산 정보 등이 포함된
다
[5]. 일례로, 미국의 전략사령부 (USSTRATCOM)
산하 합동우주센터
(JSpOC)에서는 지구 궤도를 선
회하며 임무를 수행하는 운영 위성과 우주파편
, 발
사체
, 다른 운영위성과 같은 우주물체와의 근접거
리가 경보 기준에 들어올 경우
, 우주상황인지(SSA,
Space Situational Awareness) 서비스의 일환으로
근접데이터메시지로
CSM(Conjunction Summary
Message)을 제공해 왔다. 2014년 5월부터는 표준
문서 양식에 따라
KVN (Keyword = Value
Natation)
또는
XLM
(eXtensible
Markup
Language) 형태로 CDM이 배포되고 있다.
2.2.3 Tracking Data Message
TDM(Tracking Data Message)는 위성 운영 기
관들 간에 위성 추적 데이터를 교환하기 위한 표
준 포맷으로
, 이를 통해 서로 다른 기관에서 추적
한 정보를 상대 기관에서 어려움 없이 이용할 수
있게 됨으로써 항법 분야에 있어 상호 협조가 용
이해졌다
[6]. TDM은 ACSII 텍스트 형태로 CDM
과 동일하게
KVN 또는 XML로 표현 가능하다. 파
일 또는 실시간 스트림으로 나타낼 수 있다
. TDM
에는 기존
GEOS-C 포맷과 유사하게 지상국에서
위성을 추적한 기본 데이터
(시선거리, 방위각, 고
도각 등
) 이외에도 추적 데이터 처리에 사용 가능
한 부가 정보
(데이터 보정 여부, 기상 정보-압력/
습도
/기온, 시각 정보 등)도 포함된다.
3. 결 론
본 논문에서는 위성 운영에 관한 궤도데이터 표
준화에 대한 내용을 기술하였다
. 이를 위해, 우주
관련 정보의 상호 교환을 촉진할 목적으로 데이터
표준 개발에 참여한 우주 기관의 국제 조직인
CCSDS의 조직, 역할, 문서체계에 대해 살펴보았
고
, 본 논문에서 주로 다루고 있는 궤도 데이터의
표준화 작업을 수행하는
Mission Operations &
Information Management Service (MOIMS)의 표
준문서 현황을 정리하였다
. 궤도 데이터 양식 중
Orbit Data Message로는 OPM, OMM, 그리고
OEM의 특징 및 구성을 살펴보았다. 또한, 위성을
포함한 두 물체의 근접 궤도정보를 나타내는
Conjunction Data Message와 지상국에서 추적한
위성의 궤도정보를 나타내는
Tracking Data
Message를 각각 분석하였다. 한국항공우주연구원
에서는 현재 운영 중인 위성의 궤도 데이터 포맷
과 본 논문에서 기술한
Orbit Data Message 표준
포맷 간의 변환기를 보유하고 있어
, 필요 시 미국
합동우주센터와 용이한 데이터 교환이 가능한 상
태이다
. 또한, Conjunction Data Message의 경우에
는 위성의 안정적인 운영을 위해 상시 데이터를
확보하여 활용하고 있다
. 그리고 앞으로는 가용한
지상국을 이용하여 다른 기관의 위성을 추적하는
서비스를 제공하고
, 추적 결과물로 Tracking Data
Message도 추가적으로 지원할 예정이다.
참고문헌
1. IT용어사전, 한국정보통신기술협회
2. http://www.ccsds.org/
3. Organization and Processes for the
Consultative Committee for Space Data
Systems. Yellow Book. Issue 3. 2011.
4. Orbit Data Messages, Recommended Standard,
CCSDS 502.0-B-2, 2009.
5. Conjunction Data Message, Recommended
Standard, CCSDS 508.0-B-1, June 2013
6. Tracking Data Message, Recommended
Standard, CCSDS 503.0-B-1, 2007.
항공우주산업기술동향 14권 2호 (2016) pp. 99~105
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
우주 구조재의 우주방사선 검증 기술
정지연*
1 )
, 윤용식*, 민경주*
Study on Space radiation effect technology of space
structural materials
Choung, Jiyeon*, Yoon, Yong-sik*, Min, Kyung-joo*
ABSTRACT
Space radiation effects on the properties of space structural materials. When the materials are
radiated by the space radiation exceed the allowable radiation doses, radiation penetrates the
structural materials so that astronauts get the biological damage and the performance of
electronic devices is likely to be decreased. Therefore it is important to determine the radiation
protection shielding needs through the results of space radiation effect.
Hence we researched the expected space radiation environment applying the space structural
materials and space examine method with space radiation environmental test establishment. Also
we illustrated the space radiation threshold according to space structural materials types.
초 록
우주방사선은 우주 구조재의 특성에 영향을 미치는 우주 극한환경 요소 중 하나이다. 우주 구
조재에 대한 허용된 방사선량을 초과하여 우주 구조재를 뚫고 지나가는 경우 우주인의 신체적
손상 및 전자부품의 성능 저하를 일으키기 때문에 재료의 우주방사선 검증 결과를 바탕으로 설
계를 하고 추가적 차폐 필요성을 결정해야 한다.
본 논문에서는 구조재가 적용될 것으로 예상되는 임무의 우주방사선 환경을 연구 하고 우주방
사선을 검증하는 시험 방법 및 각 나라의 시험 구축 현황을 조사하였다. 또한 구조재 종류별 우
주방사선 한계값을 기술하였다.
Key Words : Space radiation(우주방사선), Space structural materials(우주 구조재), Gamma ray
Irradiation(감마선 조사), Proton irradiation(양성자 조사)
* 정지연, 윤용식, 민경주 한국항공우주연구원, 융합기술연구본부 항공우주응용재료팀
cjy2457@kari.re.kr, ysyoon@kari.re.kr, kjmin@kari.re.kr
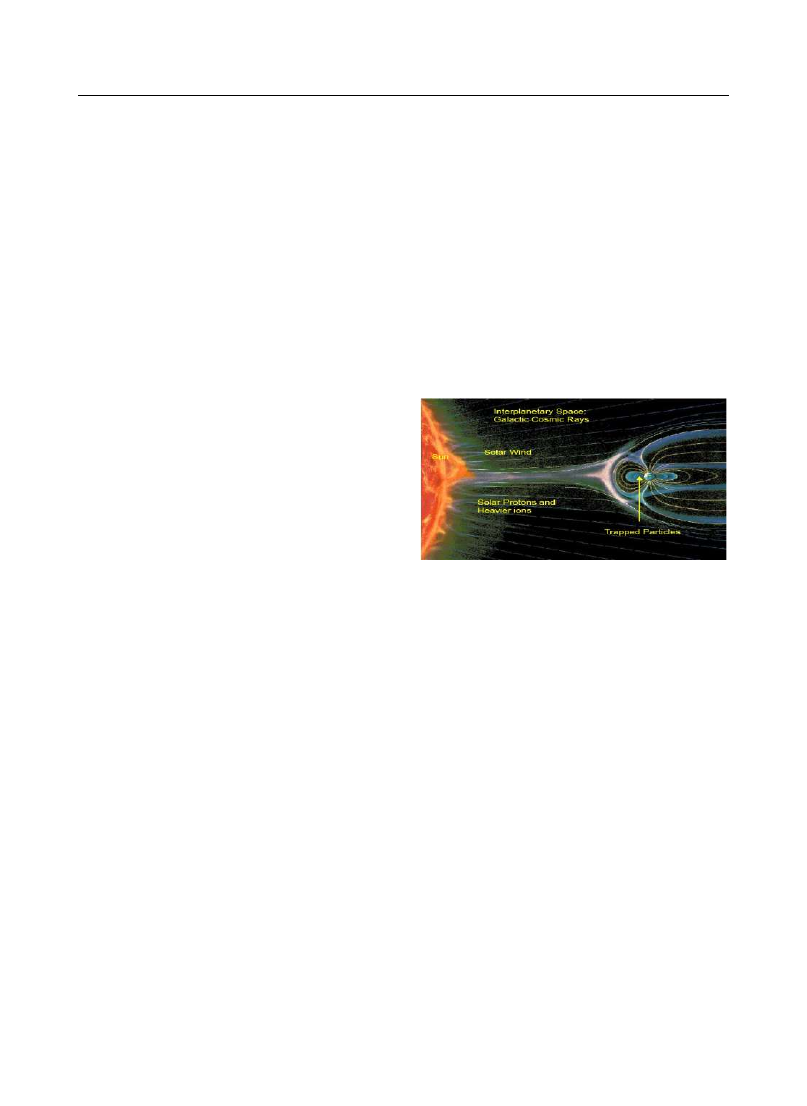
100
정지연 외 / 항공우주산업기술동향 14/2 (2016) pp. 99~105
1. 서 론
우주 극한환경에는 우주방사선
, 우주먼지, 극심
한 온도 및 원자산소 등이 있는데 그 중 우주방사
선은 우주 구조재의 성질에 영향을 미치는 요인
중 하나이다
.
인공위성 개발 초기인
1960년대 말에서 1970년
대 초에 미국
NASA에서는 궤도에 올라간 인공위
성이 원인을 알 수 없는 이유로 기능이 저하되거
나 계획된 수명을 채우지 못하는 사례가 빈번하였
다
. 그래서 그 원인을 파악한 결과 중 하나가 우주
방사선에 의한 것이었다
. 이에 따라 NASA에서는
구조재나 인공위성 표면에 우주방사선의 영향을
줄이는 코팅재를 채용하고
, 사용되는 전자부품이
우주방사선에도 성능을 유지하도록 조치하여 인공
위성의 고장 및 임무실패를 많이 줄일 수 있었다
.
일반적으로 우주방사선은 재료의 성질을 변화시
키거나 기능을 악화시킨다
. 특히 활동적인 방사선
은 구조재를 뚫고 들어가 우주인의 신체적 기능을
저하시키거나 전자부품의 성능을 저하시킨다
. 따라
서 우주방사선에 대한 구조재의 설계 계산 및 검
증을 통해 구조재가 지닌 우주방사선 저항성
(Radiation resistance)을 파악하고 차폐의 필요성
을 판단하는 것이 중요하다
.
구조재의 성질에 대한 우주방사선 영향을 검증
하는 시험의 문헌은 광범위하다
. 대부분의 시험은
실제 복합적인 우주방사선 환경을 모사를 성공하
지 못하였지만 선택적인 우주방사선 환경시험을
통해 구조재에 대한 우주방사선을 검증하였다
.
본 논문에서는 우주방사선 종류를 조사하고 이
를 검증하는 시험방법 및 현황에 대해 연구하였다
.
또한 구조재의 영향과 구조재에 따른 성질의 변화
를 나타내는 검증 결과에 대해 검토하였다
.
2. 우주방사선 분석방법 및 검증시험
2.1 우주방사선 종류
우주방사선은 발생되는 원인에 따라
<그림 1>
과 같이 크게 세 가지로 나눌 수 있다
[1].
- 태양방사선(Solar Cosmic Rays)은 주로 태양 폭
발 등 태양활동이 발생할 때 태양으로부터 돌발
적으로 방출되는 양성자와 알파입자
(헬륨 핵)로
구성되어 있다
.
- 포획방사선(Trapped Radiation)은 지구 및 행성
인근에 자기로 인해 포획되어 있는 양성자와 전
자로 구성되어 있다
.
- 은하방사선(Galactic Cosmic Rays)은 지속적으로
흐르고 있는 양성자 플럭스
(Flux)와 상대적으로
적은 중립자로 구성되어 있다
.
그림
1. 우주방사선 환경
2.2 우주방사선 분석방법
2.2.1 허용 방사선량(Allowable Radiation Doses)
미국
NASA에서는 허용 방사선량을 우주방사선
보호를 설계하기 위한 중요한 분석요인으로 두고
우주인이 임무기간에 따라 위험을 받아들일 수 있
는 수준을 기준으로 판단한다
. 일반적으로 허용 방
사선량을 결정하는 방법에 대해서는 아직 명확하
게 정해진 과정이나 정책은 없지만 재료나 부품과
관련한 나사의 설계 기준은
NASA-SP-8053 문헌을
참고하여 결정한다
[1].
우주방사선이 구조재를 통과하게 되면 주로 이
온화 구조
(Mechanisms of ionization)와 원자 변형
(atomic displacement)에 의한 손상이 발생한다. 이
러한 손상이 구조재에 영향을 미치게 되는 방사선
량 데이터를 확보해야한다
. 단위는 에너지 흡수에
대한
rad(0.01 J/kg)를 사용한다.
정지연 외 / 항공우주산업기술동향 14/2 (2016) pp. 99~105
101
2.2.2 선량 분석
선량 분석은 일반적으로 양성자
, 중입자 및 제
동복사량을 계산하는
point-kernel법과 전자량을
계산하는
Monte carlo계산법을 사용하지만 정확하
고 효율적인 분석을 위해서는 복잡하지만 기하학
적
(complex-geometry) 컴퓨터 프로그램을 사용하
여 계산한다
.
방사선량 계산식은
(1)
D는 방사선량, E는 에너지, Φ(E)는 선량 측정
지점
(Dose point)에서 흐름(Fluence)을 표현한 함수
그리고
W(E)는
에너지
-종속
가중함수
(Energy-dependent weighting function)를 나타낸
다
. 선량 측정 지점에서, Φ(E)는 주변의 질량에 영
향을 받아 변하고 외부의 우주방사선 환경에 의해
결정된다
[1]. 단위로는 rad를 사용한다.
2.3 우주방사선 검증시험
일반적으로 지구에서 수행하는 검증시험은 복합
적인 우주방사선 환경을 충분하게 구현할 수 없기
때문에 정확성이나 현실성이 떨어진다고 볼 수 있
다
. 하지만 구조재의 시험 데이터가 설계 요구에
만족하는지 여부를 판단하여 가능한 차폐 재료나
차폐 두께 등을 포함하는 시뮬레이션을 수행하기
위해서는 설계 계산을 검증해야한다
. 이를 위해 가
속기나 방사성동위원소를 이용한 시험 또는 감마
선 조사 같은 기술을 통해 구조재에 대한 우주방
사선 투과 데이터를 얻는 것이 중요하다
.
미국 나사의 브룩헤이븐 우주방사선 시험실
(Brookhaven NASA Spcae Radiation Laboratory)
은 주로 우주인들에게 노출된 이온화 방사선과 세
포 손상의 관계에 대한 이해를 위한 시험을 중점
으로 한다
. 이를 위해 양성자부터 우라늄까지 가능
한 모든 이온에 대한 빔이 준비되어 있고 이온의
종류에 따라 변화는 있지만
50MeV부터 1000MeV
의 에너지 범위가 가능한 장비를 가지고 있다
. 이
장비로 우주환경 내 우주방사선과 유사한 환경을
모사한다
[2]. 영국 시너지헬스(Synergyhealth)사는
구조재
, 태양 전지, 전자 부품 등에 대한 우주방사
선 영향을 시험하기 위한 감마선과
1~12MeV 에너
지 범위의 전자조사
, 0.5~10MeV 에너지 범위의 양
성자 조사 장치를 구비하고 있으며 온도 조절이
가능하다
[3]. 국내에는 우주방사선을 목적으로 시
험할 수 있는 시험실이 아직 갖추어져있지 않지만
<표 1>과 같이 양성자, 감마선, 선형전자 및 이온
빔 조사 장치를 구비한 센터에서 우주방사선 검증
시험이 가능하다
[4, 5]. <그림 2>와 <그림 3>은 감
마선 조사장치와 양성자 가속기를 나타낸다
.
장소
장치 종류
사양
한국원자력
연구원
양성자가속
기
연구센터
양성자가속기
TR103
-에너지 33~100MeV
TR23
-에너지 20MeV
이온빔장치
금속
-에너지 20~150keV
-Cr, Fe, Co, Cu
등 금속 이온
기체
-에너지 20~200keV
-H, He, N, O, Ar,
Kr, Xe등 기체 이온
한국원자력
연구원
첨단방사선
연구소
감마선조사장치
고준위 감마선조사
장치
-에너지 1.33MeV
-코발트60
저준위 감마선조사
장치
-에너지 1.17MeV
-코발트60
선형전자선가속기
-에너지 10MeV
표
1. 국내 방사선 시험 장치 현황
102
정지연 외 / 항공우주산업기술동향 14/2 (2016) pp. 99~105
그림
2. 감마선 조사 장치
그림
3. 양성자 가속기
3. 우주방사선 영향을 받는 구조재의 성질
3.1 물리적 성질
우주방사선 영향을 받는 구조재의 물리적 성질
(physical properties)에는 기계적 성질(Mechanical
properties), 열적 성질(Thermal properties) 그리고
광학적 성질
(Optical properties)이 있다[6]. 광학적
성질은 방사율
(Emissivity), 흡수율(Absorptance) 그
리고 반사율
(Reflectance)에 영향을 받을 수 있다.
3.1.1 기계적 성질
구조재 기계적 성질의 분석은 방사선으로 유도
되는 인장
-항복 강도(Tensile-yield strength), 최대
인장 강도
(Ultimate tensile strength), 전단 강도
(Shear strength), 연성(Ductility), 파매대 연성 전이
온도
(Ductile-to-brittle transition temperature), 피
로 강도
(Fatigue strength), 파괴 인성(fracture
toughness), 경도(Hardness), 크리프(Creep), 응력
파괴
(Stress rupture), 파열 강도(Burst strength), 내
충격성
(Impact resistance) 그리고 압축 강도
(Compressive strength)의 변형을 설명하는데 재료
에 따라 영향을 받는 기계적 성질이 다르다
. 구조
재의 기계적 성질의 변화 수준을 넘어 구조재가
적용된 우주비행선의 구조적 또는 기능적 온전함
을 손상시키지 않는 범위를 확인해야 한다
.
3.1.2 열적 성질
구조재 역적 성질의 분석은 일반적으로 단열을
목적으로 선택된 단열재
(Insulating materials) 또는
내열재
(Ablative materials)에 대한 분석을 한다. 열
전도율
(Thermal conductivity), 비열(Specific heat),
저장 에너지
(Stored energy), 융해열(Heat of
fusion), 승화열(Heat of sublimation)에 대한 우주
방사선 영향을 검증한다
. 구조재의 기계적 성질의
변화 수준을 넘어 구조재가 적용된 우주비행선의
구조적 또는 기능적 온전함을 손상시키지 않는 범
위를 확인해야 한다
.
3.2 화학적 성질
고분자의 방사선 안전성은 우주방사선에 조사되
어 변형된 화학적 구조에 따른다
. 일반적으로 새롭
게 생성된 화학적 결합은 비가역 영향
(Irreversible
effects)을 가져오기 때문이다. 고분자 종류에 따라
방사선 안전성을 증가시키는 경우도 있고 반대로
방사선 저항성이 적게 하는 경우도 있다
.
조사된 고분자의 화학적 성질의 변화는 일반적
으로 두 가지로 나뉜다
[6]. 두 가지 반응 모두 고
분자의 물리적인 성질을 변하게 하는 요인인데 모
든 고분자에 대해 변화의 정도와 방향은 다르다
.
- 교차결합(Cross linking): 교차결합은 두 개의 인접
한 고분자 사이 화학적 결합의 형태로 나타나는데
보통 탄성계수를 증가시키고 점성 유동을 방해하며
신장을 감소시키는 영향을 준다고 분석되고 있다
.
- 체인 링크(Chain link): 고분자의 균열로 탄성계
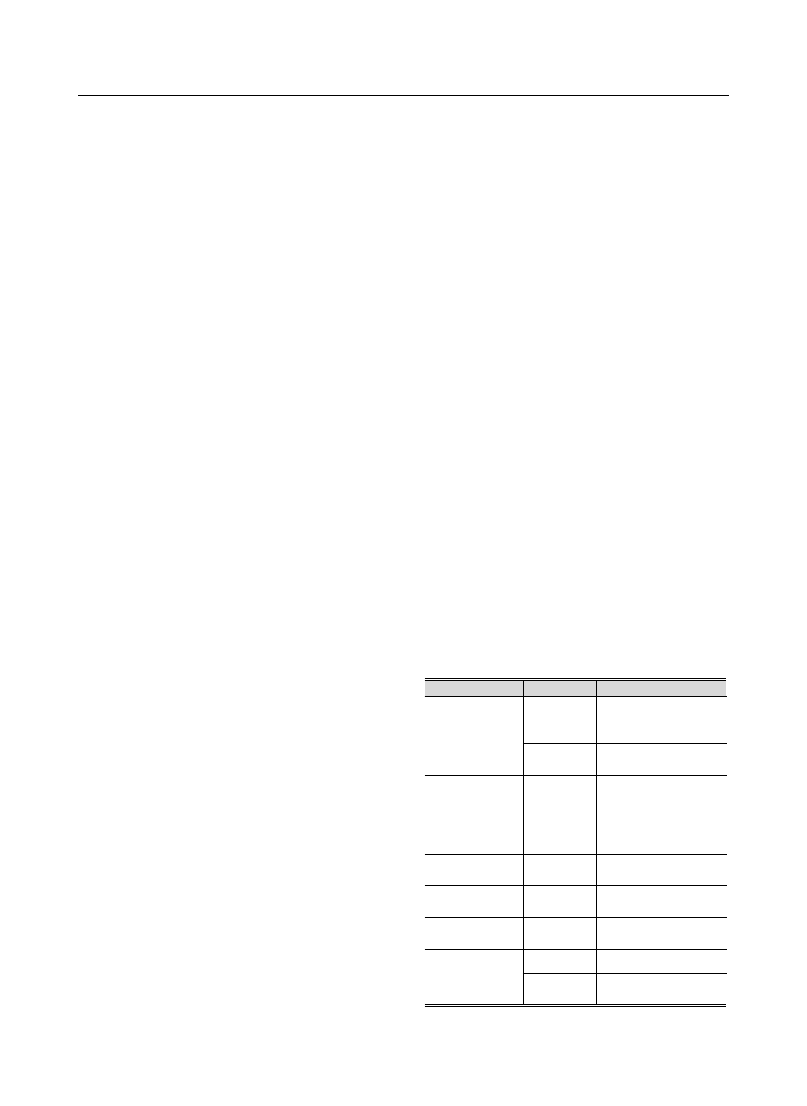
정지연 외 / 항공우주산업기술동향 14/2 (2016) pp. 99~105
103
수를 감소시키고 플라스틱 유동
(Plastic flow)에
대한 항복응력을 줄이고 신장을 증가시키며 경
도를 감소시키고 탄성력을 감소시키는 결과를
가지고 오는 것으로 알려진다
.
4. 구조재에 따른 우주방사선 검증 결과
구조재의 우주방사선 검증은 우주방사선에 의해
변화를 나타재기 시작하는 구조재의 성질을 기준
으로 한다
. 검증 범위를 정하기 위한 시험으로는
전자 조사 또는 투과력이 강한 코발트
60을 이용한
감마선 조사가 일반적으로 수행된다
. 그리고 검증
결과는 우주방사선 입자의 흐름과 흡수선량의 두
가지 기준으로 구분된다
.
금속과 세라믹은 우주방사선 안전성이 높은 편
으로 양성자
, 중성자 및 전자에 대해 1017/cm2 흐
름 이하에서는 영향을 받지 않는다
. 고분자는 대부
분
105rad까지는 영향을 받지 않고 그 이후로 기
계적 성질에 변화가 발생된다
[6]. 하지만 그 영향
이 구조적 안전성을 위협할 수준까지 도달하는 범
위에 대한 검증은 아직 미비하다
.
4.1 금속
일반적으로 구조적 금속의 기계적 성질은
1017/cm2 양성자(E > 1MeV, E=energy; eV = 1.6
x 10-19J), 1017/cm2 중성자(E > 1MeV), 1018/cm2 전
자
(E > 1MeV) 이하의 흐름에서는 눈에 띄게 변화
되는 성질이 없는 것으로 분석된다
. 따라서 수백
년처럼 극단으로 긴 임무기간이 아니라면 우주방
사선이 주요한 위험을 주지 않는다고 예상한다
[6].
4.2 고분자
고분자는 다른 구조재에 비해 우주방사선에 민
감하다고 알려져 있는데 고분자의 종류에 따라 범
위가 상이하다
. 테프론(Teflon)과 같이 우주방사선
에 취약한 재료도 있지만 짧은 기간의 임무에서
고분자 복합재는 대부분 좋은 환경적 내구성
(Environmental durability)을 가지고 있다[7].
고분자는
열경화성
플라스틱
(Thermosetting
plastics), 열가소성 플라스틱(Thermoplastics), 접착
제
(Adhesives) 그리고 탄성중합체(Elastomer)로 구
분한다
. 대부분의 열경화성 플라스틱이 상대적으로
우주방사선 저항성이 높다
[8]. 구조재에 적용되는
고분자를 포함한 다양한 고분자의 종류별로 우주
방사선에 영향을 받아 영구적인 변화가 일어나기
시작하는 방사선량 한계값
(Threshold) 결과는 <표
2>의 이온화 방사선(Ionizing Radiation)에 따른 검
증 결과와
<표 3>의 감마선조사에 따른 검증 결과
에서 확인할 수 있다
[6,8]. 재료에 따라 변화되는
성질은 기계적
, 화학적 등 다양하다. 에폭시 수지
의 경우 경화되는 방법에 따라 우주방사선 검증
결과가 변하기 때문에 구조재에 적용되는 에폭시
의 경화를 분석해야 한다
.
더불어
, 구조재의 경량화를 위한 고분자 복합재
에 대한 우주방사선 검증도 이루어지고 있는데 그
중 탄소섬유 복합재의 감마선 조사에 따른 검증결
과 극한 강도가
7x102rad이상에서 소폭 감소하고[9]
이온화 방사선에 따른 검증결과 굽힘 강도가
108rad
이상에서도 소폭 감소하는 것으로 확인되었다
[10].
재료
선량(rad)
영향
에폭시(Epoxy)
108
굽힘 강도 최대 50%
감소
(지방족 (Aliphatic) 경화 시)
109
굽힘 강도 20~50% 감소
(방향족(Aromatic 경화 시)
폴리우레탄 폼
샌드위치 구조
(Polyurethane
foam sandwich
construction)
109
영향 없음
폴리에틸렌
(Polyethylene)
2x107
인장 강도
폴리프로필렌
(Polypropylene)
6x106
충격 강도 7% 감소
나일론 시트
(Nylon sheet)
5x106
신장(Elongation) 25%
감소
테프론(TFE)
2x104
한계값 손상
4x104
최대 인장 강도 25%
감소
표
2. 이온화 방사선에 따른 검증 결과
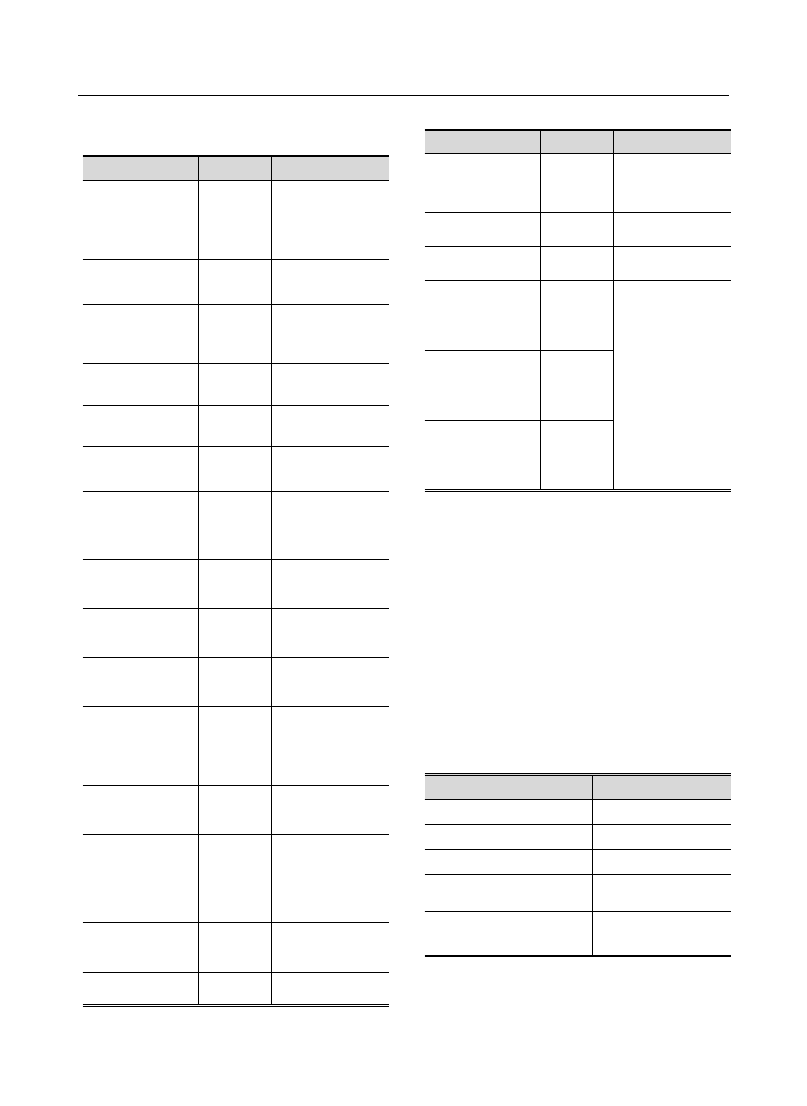
104
정지연 외 / 항공우주산업기술동향 14/2 (2016) pp. 99~105
4.3 세라믹&흑연
일반적으로 세라믹의 기계적 성질은
109 rad이
하의 이온화 방사선량의 노출이나
1019n/cm2이하
의 중성자 흐름에서는 변화가 없는 것으로 검증되
었다
[6].
흑연의 경우는
1019n/cm2(E > 1MeV) 이상의 중
성자 흐름에서는
<표 4>과 같은 물리적 성질에 변
화를 보였다
[6].
물리적 성질
영향
강도
증가
경도
증가
열전도율
대폭 감소
저장 에너지
증가
치수 안전성
(Dimensional stability)
이방성 팽창
(Anisotropic expansion)
표
4. 흑연의 물리적 성질 영향
재료
선량(rad)
영향
폴리테트라
플로우로에틸렌
(Polytetrafluoroethy
-lene, PTFE)
1.5x104
신장
셀룰로스
(Cel ulose)
105
인장 강도 증가
폴리에스터 수지
(Polyester resins
unfil ed)
105~106
신장
폴리프로필렌
3x105
신장 증가
폴리에틸렌
3.8x105
신장 증가
PVC(플라스틱형)
5x105
열 저 항 ( T h e r m a l
resistance) 감소
실리콘
엘라스토머
(Silicone
elastomers)
5x105
산화저항(Oxidation
resistance)
폴리카보네이트
(Polycarbonate)
7x105
신장
아크릴 수지
(Acrylic resin)
7x105
인장 강도 및 신장
실리콘(Silicones)
106
인장 강도, 신장,
경도
에틸렌 프로필렌
탄성체
(Ethylene
propylene
elastomer)
106
압축 강도
우레탄 고무
(Urethane rubber)
106
압축 강도
폴리크로로트리플
루오로에틸렌
(Polychlorotrifluoro
e-thylene, PCTFE)
1.2x106
전단 응력, 탄성계수
에틸셀룰로스
(Ethyl cel ulose)
1.5x106
충격 강도
카제인 수지
(Casein resin)
4x106
충격 강도
표
3. 감마선 조사에 따른 검증 결과
재료
선량(rad)
영향
방향족폴리아마이드
(Aromatic
polyamide)
7x106
신장
폴리이미드
(Polyimide)
107
신장 및 인장 강도
폴리스티렌
(Polystyrene)
2x107
인장 강도
폴리에스터 유리
라미네이트
(Polyester glass
laminate)
4x108
굽힘 강도
실리콘 석면
라미네이트
(Silicone-asbestos
laminate)
6x108
석면 페놀릭
라미네이트
(Asbestos
phenolics laminate)
109

정지연 외 / 항공우주산업기술동향 14/2 (2016) pp. 99~105
105
5. 결 론
우주방사선에 의한 영향을 줄이기 위해 방사선
량을 계산하여 구조재의 성질에 변화가 일어나기
전까지 방사선량을 한계값으로 결정한다
. 일반적으
로 금속 및 세라믹 등 화학적 성질의 변화가 없는
구조재의 경우는 우주방사선의 저항성이 높다고
판단할 수 있다
. 반면 화학적 성질의 변화를 가지
게 되는 고분자는 우주방사선에 민감하다고 본다
.
하지만 화학적 성질의 변화는 미세손상으로 물리
적 성질에 영향을 줄 수는 있지만 그것이 구조재
로서의 기능이 손상되는 수준이라고 판단할 수 없
다
. 그리고 현재 많이 사용되고 있는 실리콘, 폴리
우레탄
, 폴리아마이드, 폴리이미드 그리고 에폭시
수지 등은 대체로 짧은 임무에서는 내구성이 있는
것으로 연구되고 있다
.
따라서 지금보다 신뢰성 높은 우주 구조재에 대
한 우주방사선 검증 결과를 얻기 위해서는 제한적
인 우주방사선에 대한 시험범위 이상으로 여러 가
지 우주방사선 종류와 주변 환경인 열
, 원자산소를
동시에 포함하는 복합적인 우주방사선 환경을 구
현하는 검증기술을 확보하는 것이 중요하다
. 그리
고 이러한 연구가 국내에서는
KAIST 등 제한된
학교 및 연구소에서 수행되고 있으나 미국 등 위
성선진국에 비해 시험방법 등 기초기술이 많이 뒤
떨어져있다
. 향후 국내에서 독자적인 인공위성이나
우주비행체의 설계 및 제작을 수행하기 위해서는
우주방사선의 시험장치 및 방법
, 차폐와 코팅기술
등에 대한 기초연구를 많이 수행해야할 것으로 생
각된다
.
참고문헌
1. National aeronautics and space administration,
1970, “SPACE RADIATION PROTECTION”,
NASA space vehicle design criteria (structures),
NASA sp-8054, pp. 1~21
2. http://www.bnl.gov/world/
3. http://www.synergyhealthplc.com/
4. http://www.komac.re.kr
5. http://www.arti.re.kr
6. National aeronautics and space administration,
1970, “NUCLEAR AND SPACE RADIATION
EFFECTS ON MATERIALS”, NASA space
vehicle design criteria (structures), NASA
sp-80543, pp. 6~16
7. Joan G. F.
et al, National aeronautics and space
administration, 1989, “THE EFFECTS OF
SIMULATED SPACE ENVIRONMENTAL
PARAMETERS ON SIX COMMERCIALLY
AVAILABLE COMPOSITE MATERIALS”, NASA
Technical paper 2906, pp. 1~2
8. Bruce M.B. and Davis M.V., Electric power
research institute, 1981, “RADIATION EFFECTS
ON ORGANIC MATERIALS IN NUCLEAR
PLANTS”, pp. 3
9. Gagauz I. and Shevtsova M., National Aerospace
University, Kharkiv, Ukraine, 1981,
“INVESTIGATION OF RADIATION
INFLUENCE ON COMPOSITE MATERIALS”,
pp. 4
10. Katummi S.
et al, “SPACE RADIATION
EFFECTS ON MECHANICAL PROPERTIES OF
CARBON FIBER REINFORCED PLASTIC”,
Japanese Journal of applied Physics, Volum 27,
Part 1, Number 11, 1988, pp. 2141
항공우주산업기술동향 14권 2호 (2016) pp. 106~115
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
LLVM: 탑재소프트웨어 개발을 위한 차세대 컴파일러 기술
박수현*, 최종욱*
1 )
, ,
LLVM: Latest Compiler Technology
for Flight Software Development
Park, Su-Hyun*, Choi, Jong-Wook*
ABSTRACT
A compiler is a software to transform a source code written in a high-level programming
language to a machine code which can be executed by the target computer. The LLVM provides a
framework to develop a modular compiler by defining a well-formed Intermediate Representation
(IR) between source code and machine code. The LLVM is a collection of C++ libraries to build a
modular and reusable compiler1). This paper introduces the motivation and the architecture of the
LLVM and explains the features and the advantages of the LLVM IR. In addition, it illustrates how
the LLVM libraries can be used to build a compiler frontend and an optimizer based on the
Kaleidoscope tutorial2).
초 록
컴파일러란 상위 수준의 프로그래밍 언어를 프로그램을 실행하는 컴퓨터가 이해할 수 있는 기계
어 코드로 변환하는 소프트웨어이다
. LLVM은 컴파일 중간단계를 위한 표현 방식(Intermediate
Representation, IR)를 잘 정의함으로써 소스코드로부터 기계어 코드를 생성하는 컴파일러를 모듈화
해서 개발할 수 있는 기반을 제공한다
. 요컨대, LLVM이란 완전히 분리할 수 있고 재사용할 수 있는
컴파일러를 개발하기 위한
C++ 라이브러리의 집합이다1). 본 논문에서는 LLVM이 등장한 배경,
LLVM의 구조, LLVM에서 정의하는 IR의 특징과 장점을 설명한다. 그리고 Kaleidoscope 지침서2)를
토대로
LLVM 라이브러리가 컴파일러 전단부와 최적화 단계를 생성할 때 어떤 방식으로 사용되는지
소개한다
.
Key Words : LLVM, Compiler, Intermediate Representation, Software
* 박수현, 최종욱, 한국항공우주연구원, 위성기술연구단 위성비행소프트웨어팀
psh@kari.re.kr, jwchoi@kari.re.kr
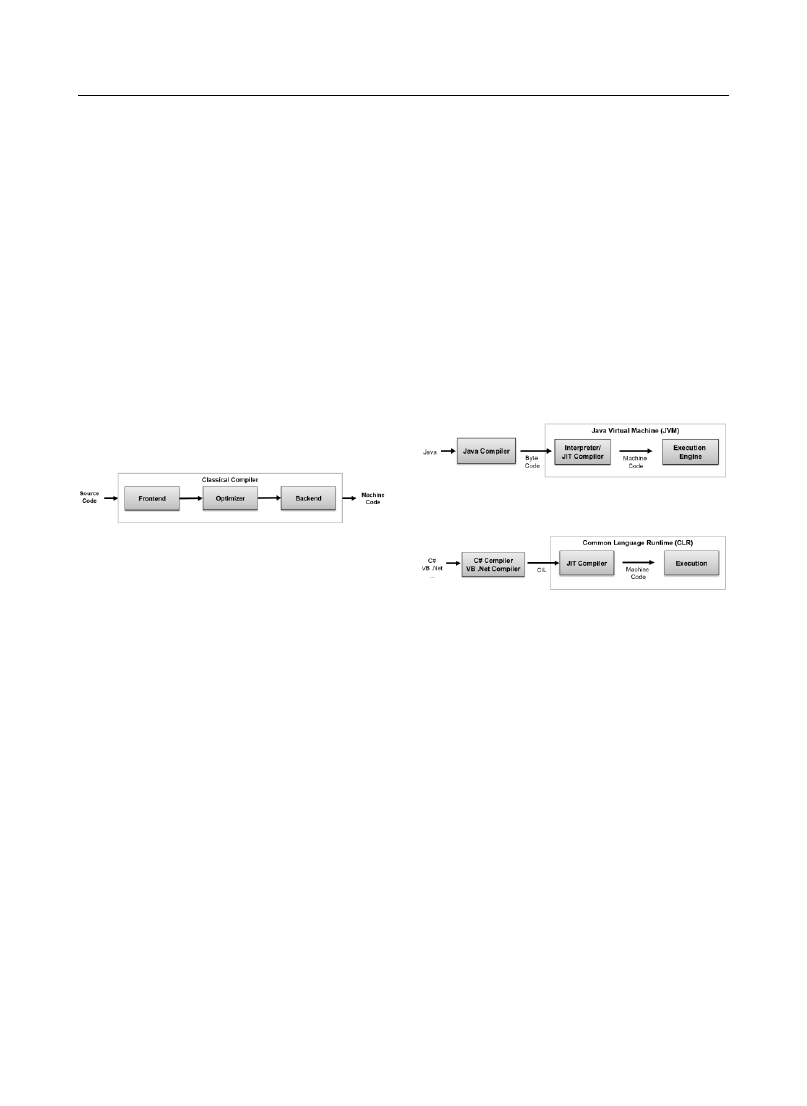
박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
107
1. 서 론
위성의 탑재소프트웨어를 비롯한 대부분의 응용
프로그램은 인간이 이해할 수 있는 고수준의 프로
그래밍 언어로 작성된다
. 이를 기계가 이해하는 언
어
, 즉 기계어로 번역하는 과정을 컴파일이라고 한
다
. 일반적으로 기존의 컴파일러는 <그림 1>과 같
은 과정을 거친다
. 전단부(Frontend)는 소스코드를
파싱해서 이에 대응하는 중간 코드를 생성한다
. 최
적화
(Optimizer) 단계에서는 프로그램의 성능을 높
이기 위해서 중간 코드로부터 최적화 가능한 패턴
을 찾아서 코드를 업데이트한다
. 말단부(Backend)
는 최적화된 중간 코드로부터 실제 타깃 머신에서
실행 가능한 기계어 코드를 생성한다
.
그림
1. 기존 컴파일러의 3 단계 컴파일 과정
1)
그런데 기존의 컴파일러는 하나의 큰 시스템으
로서 더 작은 모듈로 나눌 수가 없다
. 따라서 부분
적으로 재사용하기 어렵고
, 프로그래밍 언어와 타
켓 머신에 따라서 각각 다른 컴파일러가 존재해야
했다
. 예를 들어 Java 언어를 위한 Java 컴파일러
가 있고
, C# 언어를 위한 C# 컴파일러가 존재한
다
. <그림 2>와 <그림 3>과 같이 Java 컴파일러는
중간 코드로 바이트 코드를 생성하고
, C# 컴파일
러는 중간코드로 공통 중간언어
(CIL, Common
Intermediate Language)를 생성한다. 마이크로소프
트에서는 자사에서 지원하는 다른 언어
(VB .net,
ASP .net 등)에 대해서도 공통된 중간코드를 생성
해서 이후 컴파일 및 실행 환경을 공유하고 있다
.
하지만 타사의 컴파일러와는 공유하는 부분이 없
고 소스코드 또한 공개되지 않기 때문에 필요에
따라 확장이 불가능하다
.
Java 와 C# 모두 실행 시에 최적화된 기계어 코
드를 바로 생성할 수 있는
JIT (Just In-Time) 컴
파일을 지원하고 있으며
, 다음과 같은 가상의 실행
환경을 제공하고 있다
.
Ÿ
Java Virtual Machine (JVM)
Ÿ
Common Language Runtime (CLR)
Java 와 C#의 경우에는 가상의 실행환경이 실제
타켓 머신을 대신해 주기 때문에 타켓 머신에 따
라 컴파일러를 따로 만들 필요는 없다
. 하지만 최
적화와 코드 생성을 수행하는 가상의 실행환경 역
시 완벽하게 분리되지 않기 때문에 서로 다른 프
로그래밍 언어 간에 실행환경을 공유하는 것은 거
의 불가능하다
.
그림
2. Java 프로그램의 컴파일 과정
그림
3. C# 프로그램의 컴파일 과정
기존 컴파일러의 이러한 한계를 넘어서기 위해
서
2000 년부터 일리노이 대학에서 LLVM (Low
Level Virtual Machine)이라는 프로젝트가 시작되
었다
. LLVM 컴파일러는 2003년에 첫 번째 빌드가
공개되었으며
, BSD(Berkely SW Distribution) 라
이센스로 오픈 소스이다
.
2장에서는 LLVM 컴파일러의 구조에 대해 설명
하고
, 3장에서는 LLVM 컴파일러의 중간 코드인
Intermediate Representation (IR)에 대해서 설명한
다
. 4장에서는 LLVM Kaleidoscope 지침서2) 바탕
으로
LLVM 컴파일러를 생성하는 과정을 예로 들
었다
. 5장에서는 최근 우주산업에서 LLVM 컴파일
러의 활용분야를 소개하고 향후 연구의 주제를 정
리한다
.

108
박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
2. LLVM 구조
LLVM 컴파일러는 중간 코드 언어를 잘 정의함
으로써 컴파일러 전단부
, 최적화 단계, 말단부를
완벽하게 분리할 수 있도록 하고 있다
. 따라서 사
용자는 컴파일의 세 가지 단계를 모듈화해서 각자
원하는 방식으로 각 모듈을 조합해서 재사용할 수
있다
.
LLVM에서 정의하는 중간 단계 언어를
Intermediate Representation (IR)이라고 부른다. 최
적화 단계는
IR 코드에 대해서 수행되며, LLVM은
이미 최적화 도구를 제공하고 있다
. 사용자는 여러
가지 최적화 기법 중 원하는 최적화 과정
(Pass)를
선택할 수 있다
. 위성 탑재소프트웨어 개발할 때
프로그래밍 언어가
C에서 Ada로 변경되는 경우,
C를 위한 전단부를 Ada를 위한 전단부로 변경하
면 최적화 단계와 말단부는 그대로 활용할 수 있
다
. 만약 타켓 머신이 변경된다면 전단부와 최적화
단계는 활용하고
, 말단부만 새롭게 개발하면 된다.
<그림 4>는 LLVM의 컴파일 과정을 보여준다.
LLVM은 일반적인 3 단계의 컴파일 과정을 따르
고 있는데
, 각 단계를 구현하는 데 필요한 잘 정의
된
C++ 라이브러리를 제공한다. 사용자는 단계별
로
LLVM에서 제공하는 라이브러리를 호출해서
쓰면 된다
. 요컨대 LLVM을 정의하자면 모듈화된
컴파일러를 개발하기 위한 잘 정의된 라이브러리
집합이라고 볼 수 있다
.
현재
LLVM이 지원하는 언어는 C, C++, Ada,
Fortran 등이다. LLVM이 지원하는 타켓 머신은
x86, ARM, PowerPC, SPARC 프로세서 등이다.
Ÿ
LLVM이 지원하는 프로그래밍 언어 :
C/C++
(Clang,
LLVM
GCC),
Ada
(DragonEgg), Fortran, . .
Ÿ
LLVM이 지원하는 타깃 머신 : x86, ARM,
PowerPC, SPARC, . .
Clang(클랭)은 C와 C++ 소스코드에 대한
LLVM 컴파일러 전단부이다. Clang 이 생성한
LLVM IR은 최적화 과정을 거쳐서, 네이티브 머신
에서 동작하는 기계어 코드로 변환된다
.
그림
5. LLVM GCC와 GCC의 성능비교
3)
<그림 5>은 LLVM GCC와 기존의 GCC 컴파일
러의 성능을 비교한 것이다
. LLVM GCC 4.2는
GCC 중간 단계(Optimizer)와 말단부(코드 생성기)
를
LLVM으로 대체하였다. GCC 가 지원하는 프로
그래밍 언어의 특징을 대부분 지원하며
, X86,
PowerPC 등의 많은 타깃 머신을 지원한다. 그리
고
GCC 4.2와 호환 가능하다. 성능을 비교해보면,
최적화 옵션에 따라 다르지만 적게는
18%(-O1 옵
션
)에서 크게는 42%(-O3 옵션)까지 성능이 향상되
었음을 알 수 있다
.3)
또한
LLVM은 JIT 컴파일을 지원한다. 컴파일러
는 프로그램을 실행하기 전에 미리 기계어로 번역
하는 도구인 반면
, 인터프리터는 프로그램을 실행
하는 순간에 바로 기계어로 번역된다
. 컴파일러는
실행 전에 기계어 코드가 미리 정해지기 때문에
정적
(static)이며, 인터프리터는 프로그램의 실행환
그림
4. LLVM 컴파일 과정
1)

박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
109
경에 따라 기계어 코드가 다르게 생성되므로 동적
(dynamic)이다. 프로그램의 성능을 높이기 위해서
LLVM은 이 두 가지 방식을 결합한 JIT 컴파일러
를 제공한다
.4) 프로그램이 실행되기 시작하면 기계
어 코드를 생성하는데
, 생성된 코드를 코드 캐쉬에
저장해서 한번 생성한 코드는 다시 생성하지 않는
다
. LLVM 은 최적화 단계와 JIT 역시 라이브러리
로 제공한다
.
3. LLVM 중간 표현 방식 (IR)
중간 표현방식
(Intermediate Representation,
IR)은 LLVM 컴파일 중간 단계에서 사용되는 코드
표현방식이다
. 대부분의 최적화는 LLVM IR에 대
해서 이루어진다
. LLVM IR을 정의하자면, LLVM
컴파일 중간 단계에서 사용하는 가상의 명령어 집
합으로서 어셈블리 코드와 유사하다
. 어셈블리 코
드는 하위 수준의 언어로서
Java, C#, C 등의 상
위 수준의 언어보다는 이해하기 어렵지만
, 결국 기
계어 코드로 변환되기 위해서는 이와 같은 중간
단계의 코드 표현이 필요하다
. LLVM IR의 특징은
다음과 같이 정리할 수 있다
.5)
Ÿ
RISC (Reduced Instruction Set Computing)
과 유사한 명령어 집합
. RISC란 명령어 개
수를 줄이고 명령어의 구조를 간단하게 만
드는 컴퓨팅 방식이다
. 단, 대부분의 RISC
명령어 집합과는 달리
LLVM IR은 강력한
타입
(Strong
Type)의 언어이다.
가령
,
LLVM IR에서 여러 번 실행할 수 있는 함
수를 정의할 때
, 함수의 인자는 모두 타입
을 선언해야 한다
. 그리고 함수의 반환값에
대해서도 타입을 선언한다
.
Ÿ
3 주소 (3-address) 명령어 형식. 하나의 명
령어는 세 개의 인자를 가지는데
, 첫 번째
인자는 명령의 결과의 타입을 명시하고
, 나
머지 두 개의 인자는 명령의 피연산자를 나
타낸다
. 예를 들어 ‘%tmp = sub i32 %a, 1’
이라는 명령어는
%a 변수에서 1을 빼서, 32
비트 정수
(integer32, i32)형 레지스터인
%tmp에 연산 결과를 저장한다.
Ÿ 무한한 수의 가상의 레지스터를 가진 정적
단일 할당문
(Static Single Assignment,
SSA). LLVM IR은 실제로 타깃 머신에서
실행되는 것이 아니기 때문에
, 무한한 수의
레지스터를 가정한다
. 실제 머신에서는 이
미 정의된 이름을 가진 유한한 수의 레지스
터가 사용된다
. 하지만 LLVM IR은 소스코
드와 기계어 코드 사이에 가상화된 중간 코
드이므로
, 레지스터를 원하는 이름으로 무
한한 수만큼 쓸 수 있다
. 가령 LLVM 라이
브러리를 이용하여 수식에 대한
LLVM IR
을 생성할 경우
, 메모리의 값을 레지스터로
로드하거나
, 레지스터의 값을 메모리로 저
장하기 위한
load/store 명령어 없이 단순
히 레지스터 연산에 대한 명령어가 생성된
다
. 또한 정적 단일 할당문 형식을 따르므
로
, LLVM IR에서는 모든 변수가 정확히 단
한번만 할당되고
, 사용하기 전에 반드시 먼
저 정의해야 한다
. 이는 LLVM IR을 최적화
하기 위함이다
. 가령 특정 변수에 여러 번
값이 할당되고 마지막 값만 사용이 된다면
,
이전의 할당문은 최적화 단계에서 생략할
수 있다
.
Ÿ 프로그래밍 언어과 타깃 머신에 대해서 독
립적
. LLVM IR은 소스코드가 어떠한 프로
그래밍 언어로 되어 있든지 상관없이 생성
할 수 있다
. 이는 LLVM이 어떠한 프로그래
밍 언어도 변환할 수 있는 강력한 중간 코
드
, 즉 IR을 잘 정의했기 때문에 가능하다.
그리고
LLVM IR은 프로그램이 실행되는
타켓 머신의 세부적인 사항들을 숨기기 때
문에
(abstraction), 타켓 머신에 독립적으로
LLVM IR을 생성할 수 있다. 가령 LLVM
IR에서 함수 호출 시, call, ret 명령어와 명
시적인 함수의 인자 외에 다른 세부적인 사
항들은 숨긴다
.
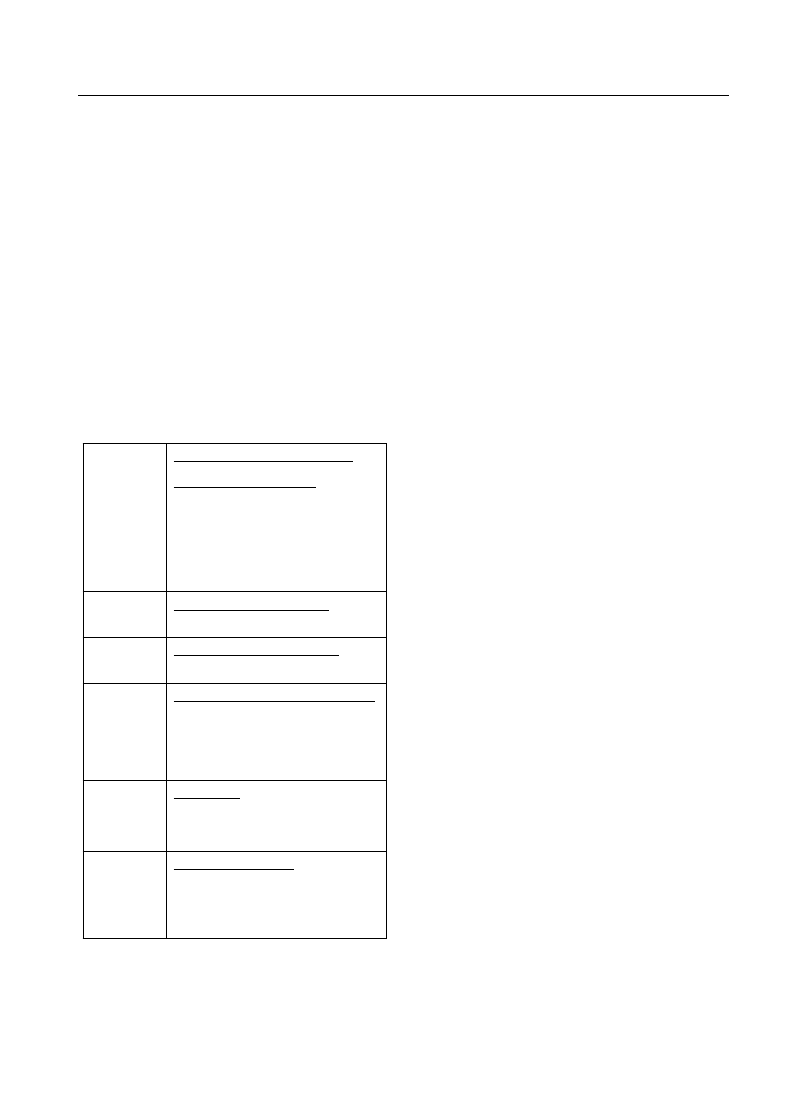
110
박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
3.1 LLVM IR 명령어
LLVM IR은 컴파일 중간 단계를 위한 코드이긴
하지만 사람이 읽을 수 있도록 잘 구성되어 있다
.
<표 1>은 LLVM IR에서 제공하는 타입과 명령어
를 보여준다
.6) N비트의 정수는 iN으로 표현된다.
가령
i1은 단일 비트 정수, i32는 32 비트 정수,
i342는 342 비트 정수를 의미한다. 실수는 부동소
수점 방식으로
float은 32 비트 실수, double은 64
비트 실수를 의미한다
. 메모리 위치를 명시하기 위
한 포인터 타입도 제공한다
. i32*는 32 비트 정수
에 대한 메모리 위치를 가리킨다
.
여러 요소로 구성된 벡터 타입도 표현할 수 있
는데
, <<# elements> × < elementtype>>로 표현
한다
. 가령 <4 × float> 은 4개의 부동소수점 실수
로 구성된 벡터를 의미한다
. 반면 배열은 [<#
elements> × < elementtype>] 로 표현한다. 가령
[40 × i8]은 40 개의 8비트 정수형이 메모리에 연
속해서 위치하게 된다
. 구조체 타입은 메모리에 여
러 데이터 멤버를 모아둔 하나의 집합이다
. 메모리
에
있는
구조체에
접근하기
위해서는
‘getelementptr' 명령어를 사용해서 해당 필드에 대
한 포인터를 얻어서
’load/store' 명령을 사용하면
된다
. 레지스터에 있는 구조체에 접근하기 위해서
는
'extractvalue/insertvalue' 명령어를 사용한다.
가령
{i8, [2 × i16]} 은 8 비트 정수와 16 비트 정
수형
2개로 구성된 배열을 멤버로 가지는 구조체
이다
.
LLVM IR에서 제공하는 명령어는 어셈블리 언
어에서 제공하는 대부분을 지원한다
. add, sub,
shl, shr 등과 같은 수리 및 논리 연산 명령어의
경우
, 3개의 인자를 가지며 연산의 결과는 반드시
타입을 명시해야 한다
. 가령 ‘%tmp = add i32
%indvar, -512’ 라는 명령어는 indvar 레지스터의
값과
-512를 더한 결과를 32 비트 정수형 레지스터
인
tmp에 저장한다.
메모리 접근과 해서
'alloca/store/load' 등의 명
령이 있다
. <표 1>에서 예제로 쓰인 ‘%prt =
alloca i32' 문은 32 비트 정수형을 메모리에 할당
하고 이에 대한 포인터를 반환한다
. 'store i32 3,
i32* %ptr' 문은 32 비트 정수형 포인터인 ptr이
가리키는 메모리에
32 비트 정수 3을 저장한다. 마
지막으로
’%val = load i32, i32* %ptr' 문은 32 비
트 정수형 포인터인
ptr이 가리키는 메모리로부터
값을 읽어와서
32 비트 정수형인 val 레지스터에
값을 할당하게 된다
. 즉, val 레지스터의 값은 3이
된다
.
비교와 관련된 명령문은
'icmp/select'가 있다.
'icmp' 문은 두 개의 정수 값을 비교하여 'true' 또
는
'false'를 반환한다. <표 1>에서 예제로 쓰인
'%Y = icmp eq i32 %a, 1024' 문은 32비트 정수형
레지스터
a의 값이 1024와 같으면 'true'를 다르면
'false'를 반환해서 레지스터 Y의 값으로 할당한다.
Types
integer, floating point, pointer,
vector, array, structure, ...
i1, i32, i342,
double, i32*,
<4 x float>, [40 x i8],
{i8, [2 x i16]}
Arithmetic
add, sub, mul, udiv, sdiv, ...
%tmp = add i32 %indvar, -512
Logical
operations
shl, lshr, ashr, and, or, xor, ...
%shr21 = ashr i32 %mul20, 8
Memory
access
load, store, alloca, getelementptr, ...
%ptr = alloca i32
store i32 3, i32* %ptr
%val = load i32, i32* %ptr
Comparison
icmp, select
%Y = icmp eq i32 %a, 1024
%X = select i1 true, i8 17, i8 42
Control
flow
call, ret, br, switch, ...
call void @foo(i32 %phitmp)
br i1 %cond, label %IfEqual, label
%IfUnequal
표
1. LLVM IR에서 제공하는 타입과 명령어
6)
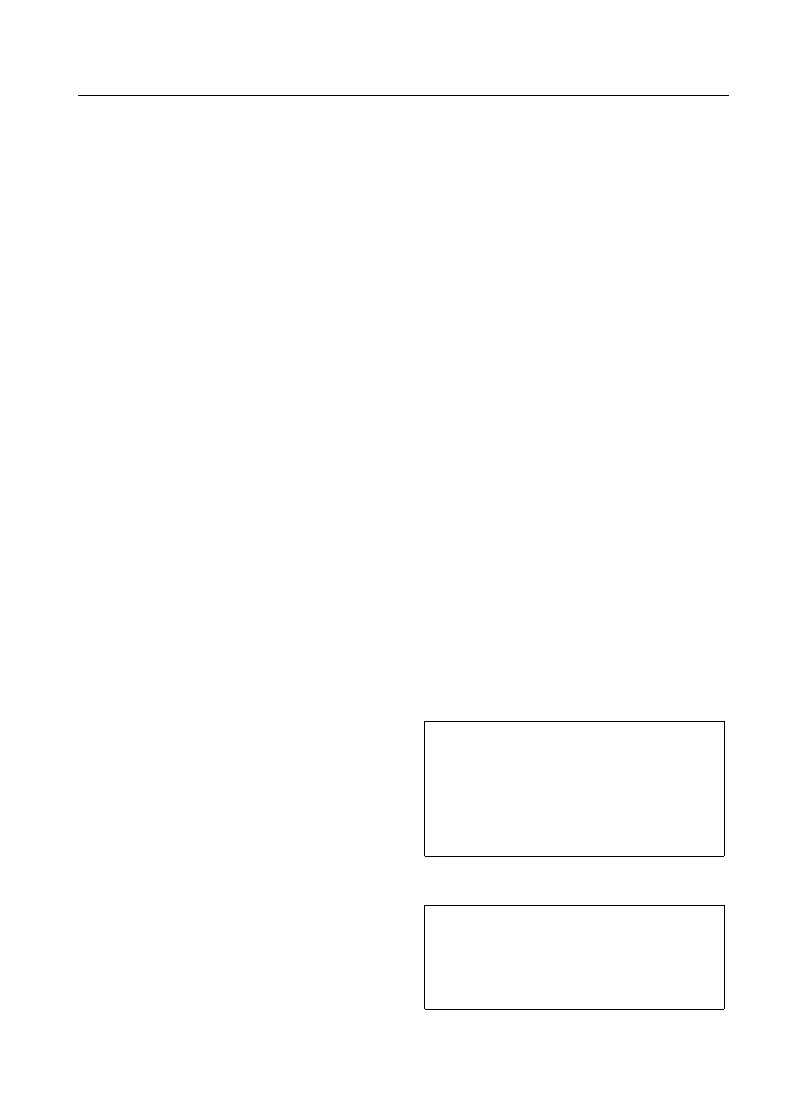
박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
111
'icmp' 문은 정수형 포인터에도 쓸 수 있으며, 정
수 벡터
, 포인터 벡터 인자에 대해서도 쓸 수 있
다
. 그리고 비교 가능한 조건은 다음과 같다.
Ÿ
eq: equal
Ÿ
ne: not equal
Ÿ
ugt: unsigned greater than
Ÿ
uge: unsigned greater or equal
Ÿ
ult: unsigned less than
Ÿ
ule: unsigned less or equal
Ÿ
sgt: signed greater than
Ÿ
sge: signed greater or equal
Ÿ
slt: signed less than
Ÿ
sle: signed less or equal
'select' 문은 조건에 따라 둘 중 하나의 값을 선
택하는 명령이다
. <표 1>에서 예제로 쓰인 '%X =
select i1 true, i8 17, i8 42' 문은 단일 비트 정수인
조건
(i1)에 따라 8 비트 정수의 값을 다르게 반환
하게 된다
. 즉, 조건이 true이면 17을, flase이면 42
를 반환한다
.
조건 분기와 관련된 명령은
'call, ret, br,
switch' 등이 있다. LLVM 프로그램은 함수, 전역
변수 등으로 구성되는데
'call/ret'은 함수 호출과
관련된 명령이다
. <표 1>에서 예제로 쓰인 'call
void @foo(i32 %phitmp)' 문은 foo 라는 함수를
호출하는데
, 함수의 인자는 32 비트 정수형 하나이
고
, 반환값은 void 형이다. ‘br' 문은 조건에 따라
서로 다른 기본 블럭으로 분기하는 명령이다
. 기본
블록이란 분기 없이 연속적으로 실행되는 일련의
명령어 집합이다
. <표 1>에서 예제로 쓰인 ’br i1
%cond, label %IfEqual, label %IfUnequal' 문은
단일 비트 정수형 레지스터
cond의 값이 참이면
IfEqual 레이블로 분기하고, 거짓이면 IfUnequal
레이블로 분기한다
.
3.2 LLVM IR 예제
본 절에서는
C로 작성된 소스코드가 어떻게
LLVM IR로 변환되는지 예제를 통해 설명한다.
<표 1>과 <표 2>는 예제로서 C로 작성된 소스코
드와 이에 대응하는
LLVM IR을 보여준다.1) C 코
드에서는 두 개의 정수 값을 더하는 함수를 두 가
지 방식
(add1, add2)으로 구현하였다.
add1 함수는 양의 정수를 두 개 입력 받아서 두
값을 더한 결과를 반환하는 일반적인 더하기 함수
이다
. add1 함수가 LLVM IR 함수로 변환될 때,
add1 함수의 파라미터(a, b)는 그대로 레지스터 이
름
(%a, %b)으로 사용된다. 그리고 연산의 결과는
새로운 레지스터인
%temp에 저장된 후, 함수가
종료될 때 반환된다
. add1 함수는 조건문이 없으
므로
, LLVM IR 내에 entry라는 레이블을 하나만
가지고 있다
.
add2 함수는 두 개의 인자 중에서 a가 0이 될
때까지
, a는 하나씩 감소시키고 b는 하나씩 증가시
키면서
add2 함수를 재귀적으로 호출한다. LLVM
IR 내에 조건에 따른 분기가 일어나므로 여러 개
의 레이블
(entry, recurse, done)을 가지고 있다. 실
제 구현에서는 비효율적인 방식이지만
LLVM IR
이해를 돕기 위한 예제이다
. SSA 형식을 따르므로,
%temp1에서 %tmp4과 같은 임시로 생성한 레지스
터 변수들은 단 한번만 할당이 되고
, 사용하기 전
에 미리 정의된다
.
unsigned add1(unsigned a, unsigned b) {
return a+b
}
// Perhaps not the most efficient way
// to add two numbers.
unsigned add2(unsigned a, unsigned b) {
if (a == 0) return b;
return add2(a-1, b+1);
}
표
2. C 코드 더하기 함수 예제
define i32 @add1(i32 %a, i32 %b) {
entry:
%tmp1 = add i32 %a, %b
ret i32 %tmp1
}
표
3. LLVM IR 더하기 함수 예제
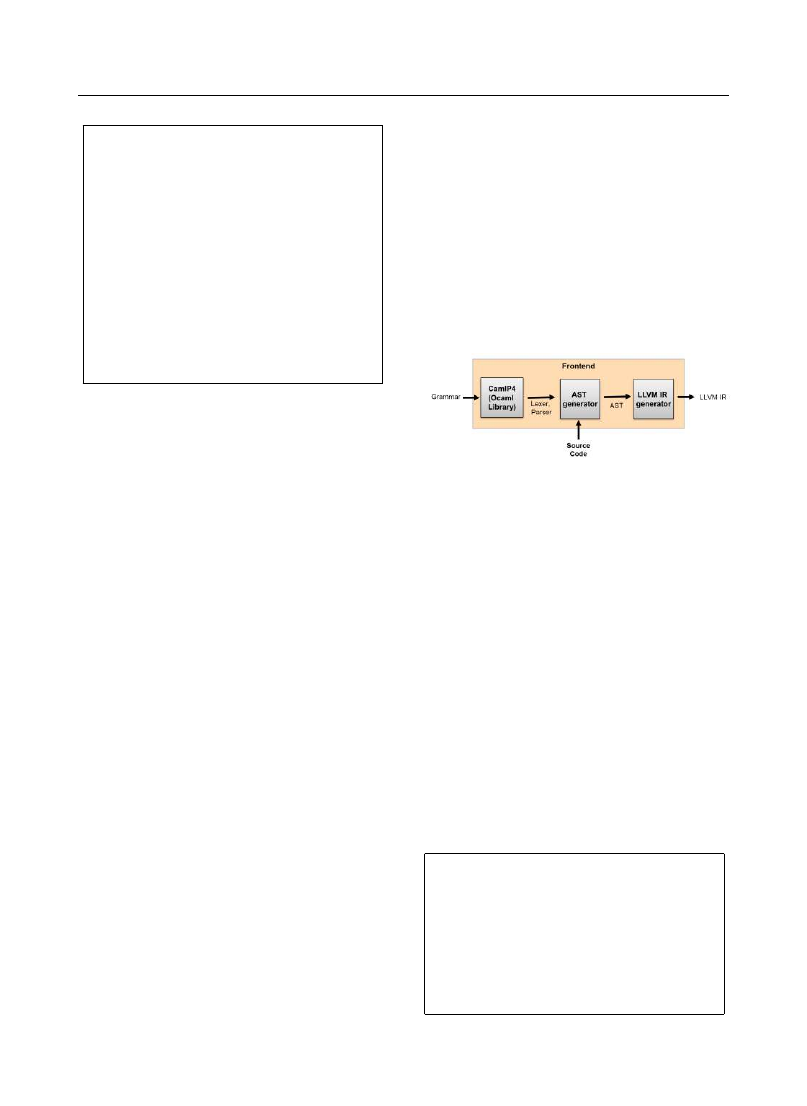
112
박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
4. LLVM 라이브러리
2장에서 LLVM이란 모듈화된 컴파일러를 개발
하기 위한 라이브러리의 집합이라고 정의했다
.
LLVM을 통해서 만들어진 컴파일러를 부분적으로
완벽하게 분리해서 재활용하는 것이 궁극적인 목
표이다
. 본 장에서는 LLVM 공식 사이트에서 제공
하고 있는
Kaleidoscope 지침서2) 를 토대로 LLVM
에서 제공하는 라이브러리가 어떻게 컴파일러를
개발하는데 사용되는지 살펴보겠다
. 지침서에서는
아름다운 광경을 의미하는
Kaleidoscope 언어를
정의하고
, 이 언어에 대한 컴파일러 전단부, 최적
화 단계
, 그리고 JIT 컴파일러를 생성하는 예제를
보여준다
. Kaleidoscope는 간단한 함수를 정의하고
호출할 수 있는 절차적 언어로서 실수에 대한 연
산을 수행한다
.
4.1 컴파일러 전단부
지침서는
Object Caml(Categorical Abstract
Machine Language) 언어에서 제공하는 라이브러
리인
CamlP4
(Caml
Pre-Processor
and
Pretty-Printer)을 이용하여 파서를 생성하는 것부
터 시작한다
. 파서란 소스코드 입력을 의미 있는
문법 구조로 인식하는 과정이다
. 파서를 생성하기
위해서는 먼저
Kaleidoscope 언어 문법을 정의해
야 한다
. 문법 정의에 따라 CamlP4 라이브러리는
파서를 생성해 준다
. 이제 파서는 소스코드 입력해
대해 추상 구문 트리
(Abstract Syntax Tree, AST)
를 생성하게 된다
. 일반적인 파서 생성 도구들은
AST까지 자동으로 생성해 주는데, 본 지침서에서
는 처음부터 끝까지 컴파일러 생성하는 과정을 최
대한 보여주기 위해서
CamlP4를 선택하였다. <그
림
6>은 Kaleidoscope 컴파일러의 전단부 구조를
보여준다
.
AST로부터 LLVM IR을 생성하기 위해서 <표
4>와 같이 LLVM 라이브러리들을 활용할 수 있다.
가령 두 개의 연산자를 가진
Binary Operation 문
법 구조
(Ast.Binary)에 대해서 연산자가 ‘+’인 경우
build_add
라이브러리
함수를
,
‘-’인 경우
build_sub 함수를 호출한다. 이제까지 LLVM처럼
컴파일의 중간단계 코드를 생성해 주는 라이브러
리 또는 도구가 공개된 바가 없었다
. 이것은
LLVM이 컴파일 중간 단계 언어(IR)를 잘 정의하
고 공개하고 있기 때문에 가능한
LLVM 만의 특
장점이다
. 사용자는 SSA 형식의 LLVM IR를 만들
기 위해 고민할 필요 없이
, 라이브러리를 호출해서
쓰면 된다
.
define i32 @add2(i32 %a, i32 %b) {
entry:
%tmp1 = icmp eq i32 %a, 0
br i1 %tmp1, label %done, label %recurse
recurse:
%tmp2 = sub i32 %a, 1
%tmp3 = add i32 %b, 1
%tmp4 = call i32 @add2(i32 %tmp2, i32
%tmp3)
ret i32 %tmp4
done:
ret i32 %b
}
open Llvm
…
let rec codegen_expr = function
…
| Ast.Binary (op, lhs, rhs) ->
let lhs_val = codegen_expr lhs in
let rhs_val = codegen_expr rhs in
begin
match op with
표
4. LLVM 전단부 라이브러리
그림
6. Kaleidoscope 컴파일러 전단부 구조

박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
113
4.2 컴파일러 최적화 단계
LLVM 최적화는 LLVM IR에 대해서 이루어진
다
. 최적화는 과정은 <그림 7>과 같이 여러 단계
를 거칠 수 있으며
, LLVM은 최적화를 위한
PassManager 라이브러리를 제공한다. 기존의 컴파
일러는 최적화 수준을 낮게 할 것인지 높게 할 것
인지 정할 수 있는 반면
, LLVM은 사용자가 원하
는 최적화 패스를 스스로 결정할 수 있다
.
<표 5>는 PassManager 라이브러리를 이용해
서
LLVM IR을 최적화하는 과정을 통해서 보여
준다
. Kaleidoscope 컴파일러 전단부에서 생성한
LLVM IR은 Codegen.the_module 객체에 저장된
다
. PassManager는 LLVM IR에 대한 최적화 함
수를 생성한 이후에
, 4단계의 최적화 패스가 추
가하였다
.
<표 6>은 LLVM 최적화 라이브러리 함수 중
빼기를 간단히 만드는
SimplySubInst 라는 함수가
어떻게 구현되어 있는지 보여주는 예제이다
.
LLVM IR에서 최적화 대상이 되는 첫 번째 패턴
은 레지스터
%b에서 0을 빼는 경우이다.
SimplySubInst 함수는 LLVM IR의 첫 번째 인자
가 있고
, 두 번째 인자가 0인 경우라면, 빼기를 수
행하지 않고 바로 첫 번째 인자를 반환하게 된다
.
두 번째 패턴은 레지스터
%a에서 %a를 빼는 경
우이다
. SimpySubInst 함수는 패턴 매칭에서 빼기
명령의 첫 번째 인자와 두 번째 인자가 같다면 같
은 타입의 상수
, NullValue(최적화를 수행한 결과
가
0)를 반환한다. 만약 어떠한 패턴도 매치되지
않는 경우
, SimplySubInst 함수는 최적화를 종료
하고
0(최적화가 수행되지 않았음을 의미)을 반환
한다
.
| '+' -> build_add lhs_val rhs_val "addtmp"
builder
| '-' -> build_sub lhs_val rhs_val "subtmp"
builder
| '*' -> build_mul lhs_val rhs_val "multmp"
builder
| '<' -> (* Convert bool 0/1 to double 0.0
or 1.0 *)
let i = build_fcmp Fcmp.Ult lhs_val rhs_val
"cmptmp" builder in
build_uitofp i double_type "booltmp" builder
…
let the_fpm = PassManager.create_function
Codegen.the_module in
…
(* Do simple "peephole" optimizations and
bit-twiddling optzn. *)
add_instruction_combining the_fpm
표
5. 최적화 라이브러리 예제
(* reassociate expressions. *)
add_reassociation the_fpm
(* Eliminate Common SubExpressions. *)
add_gvn the_fpm
(* Simplify the control flow graph (deleting
unreachable blocks, etc). *)
add_cfg_simplification the_fpm
Patterns
in LLVM
IR
⋮ ⋮ ⋮
%example2 = sub i32 %b, 0
⋮ ⋮ ⋮
%example1 = sub i32 %a, %a
⋮ ⋮ ⋮
%tmp = mul i32 %c, 2
%example3 = sub i32 %tmp, %c
⋮ ⋮ ⋮
Transfor
mation
function
// X - 0 -> X
if (match(Op1, m_Zero()))
return Op0;
표
6. LLVM 최적화 라이브러리 함수 (SimplySubInst)
그림
7. LLVM 최적화 과정
5)

114
박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
4.3 JIT 컴파일러
LLVM은 LLVM IR로부터 기계어 코드를 미리
생성하지 않고
, 실행 시에 바로 생성하는 JIT
(Just-In-Time) 컴파일러를 지원한다. <표 7>은 사
용자가
Kaleidoscope 함수를 표준 입력으로 정의
하거나 호출하면
, 이 함수에 대한 LLVM IR을 생
성하고
, 해당 함수를 바로 실행하는 JIT 컴파일러
를 생성하는 코드이다
. LLVM은 ExecutionEngine
이라는
라이브러리를
제공하며
,
이
중
run_function 함수를 호출하면 함수에 대한 LLVM
IR (the_function)을 바로 실행할 수 있다.
<표 8>은 <표 7>에서 생성한 JIT 컴파일러를 실
행한 화면이다
. 사용자는 표준 입력으로 testfunc라
는 함수를 정의하고 호출한다
. 그러면 JIT 컴파일
러는
testfunc 함수에 대한 LLVM IR과 이름 없는
함수
(@"")에 대한 LLVM IR를 생성한다. 이름 없는
함수는
testfunc을 호출해서, 연산 결과인 24.0을
반환한다
.
5. 결 론
최근
LLVM 은 우주산업 분야에서 다양하게 활
용되고 있다
. 유럽우주국(European Space Agency,
ESA)과 유럽우주연구 및 기술센터 (European
Space Research and Technology Centre, ESTEC)
open Llvm
open Llvm_executionengine
(* top ::= definition | external | expression | ';' *)
let rec main_loop the_fpm the_execution_engine
stream =
...
표
7. JIT 컴파일러 예제
let the_function = Codegen.codegen_func
the_fpm e in
dump_value the_function
(* JIT the function, returning a function pointer.
*)
let result = ExecutionEngine.run_function
the_function [||]
the_execution_engine in
print_string "Evaluated to ";
print_float (GenericValue.as_float
Codegen.double_type result);
print_newline ();
ready> def testfunc(x y) x + y*2;
Read function definition:
define double @testfunc(double %x, double %y) {
entry:
%multmp = fmul double %y,
2.000000e+00
%addtmp = fadd double %multmp, %x
ret double %addtmp
}
ready> testfunc(4, 10);
define double @""() {
entry:
%calltmp = call double @testfunc(double
4.000000e+00, double 1.000000e+01)
ret double %calltmp
}
Evaluated to 24.000000
표
8. JIT 실행 예제
// X - X -> 0
if (Op0 == Op1)
return
Constant::getNullValue(Op0->getType());
// (X*2) - X -> X
if (match(Op0, m_Mul(m_Specific(Op1),
m_ConstantInt<2>())))
return Op1;
…
return 0; // Nothing matched, return
// null to indicate no transformation.

박수현 외 / 항공우주산업기술동향 14/2 (2016) pp. 106~115
115
에서는
SPARC용 LLVM 컴파일러의 말단부
(Backend)를
우주용
컴퓨터에
사용되는
Leon2/3/4-FT(Fault
Tolerant)
프로세서
및
NGMP(Next Generation Multi Purpose) 멀티코어
프로세서에 대해서 확장하고 있다
.5)
LLVM은 프로세서를 가상으로 모사해주는 프로
세서 에뮬레이터 개발에도 쓰인다
. 프랑스 아스트
리움에서는
LEON2/LEON3 프로세서를 위한 에뮬
레이터인
SimLEON을 구현하기 위해서 LLVM JIT
컴파일러를 활용하였다
.7) 유럽 Terma 사에서 개발
한
T-EMU는 LLVM에 기반한 고성능의 마이크로
프로세서 에뮬레이터로서 소프트웨어 검증 장비
혹은 소프트웨어 운영을 위한 시뮬레이터에 사용
된다
.
T-EMU는 현재 ERC32
프로세서와
LEON2/3/4 등을 지원하며, 다른 프로세서에 대해
서도 유연하게 확장이 가능하다
.8)
이제까지
LLVM에 대한 전반적인 소개와
Kaleidoscope 지침서2)를 바탕으로 LLVM 활용예
제를 살펴보았다
. 그리고 최근 LLVM 컴파일러가
우주산업에
활용된
분야를
소개하였다
.
Kaleidoscope 예제에서는 LLVM를 이용하여 컴파
일러 전단부
(frontend)와 최적화 단계(optimizer)까
지 생성하는 과정을 개괄하였다
. 컴파일러의 말단
부
(backend), 즉 기계어 코드를 생성하는 단계에서
는 타깃 머신에 종속적인 부분
, 가령 레지스터 정
보 혹은 명령어 정보들을 기술해야 하는데
, 이 부
분은 향후 기술 동향 연구에서 소개하도록 하겠다
.
참고문헌
1. http://www.aosabook.org/en/llvm.html,
LLVM - The Architecture of Open Source
Application
2. http://llvm.org/docs/tutorial/index.html,
LLVM Tutorial - Kaleidoscope: Implementing
a Language with LLVM
3. Christ Lattner, "Introduction to the LLVM
Compiler System", Advanced Computing and
Anallysis Techniques in Physics (ACAT), 2008
4. John Aycock, “A brief history of just-in-time”,
ACM Computing Surveys, 제35권, 제2호, 2003,
pp.97-113
5. J. Lopez, "Compiler situation for space
application", ESA Workshop on Avionics,
Data, control and Software System (ADCSS),
2014
6. http://llvm.org/docs/LangRef.html, LLVM
Language Reference Manual
7. O. MEURANT, "JIT Technology for SimLEON
- Numerical Emulation of LEON2/LEON3
Processors", Simulation and EGSE facilities for
Space Programmers (SESP), 2010
8. http://t-emu.terma.com
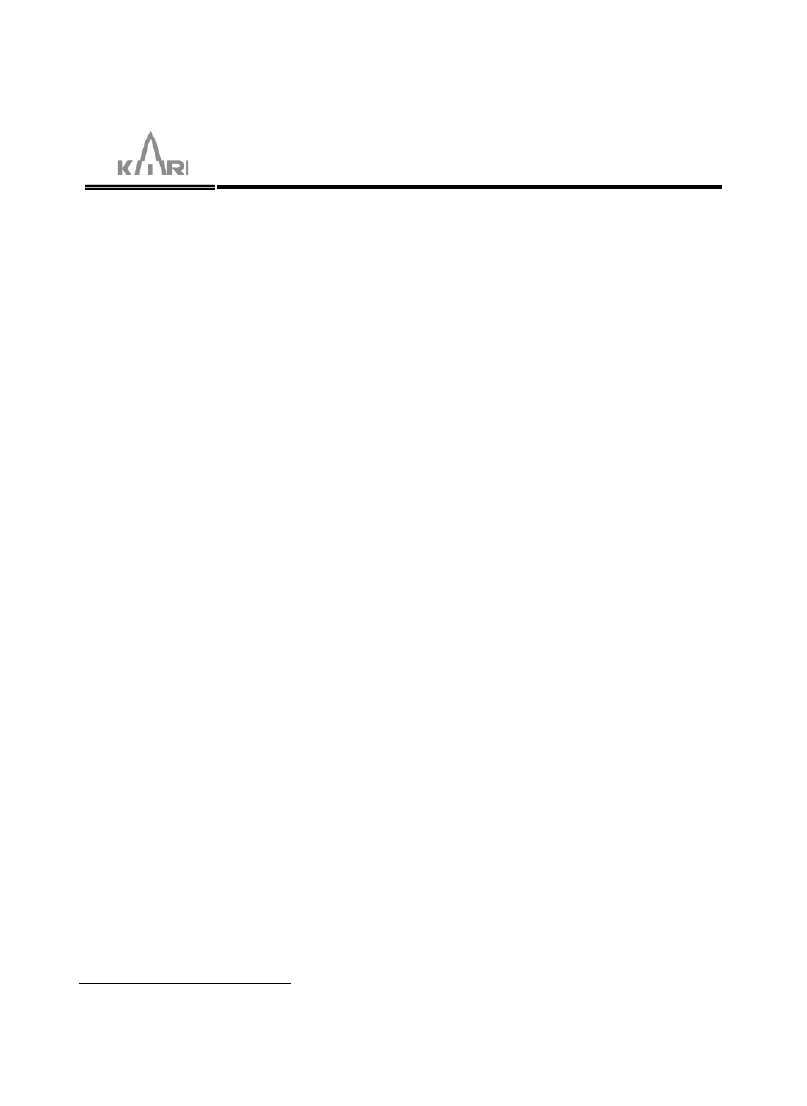
항공우주산업기술동향 14권 2호 (2016) pp. 116~123
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
소형 무인기의 오픈아키텍처
기반 비행제어/임무컴퓨터 개발 현황
윤원근*
1)
, 최인호*,김태식*
Development Status of Open-architecture based
Flight Control/Mission Computer for Small UAV
Youn, Won-Keun*, Cho, In-Ho*, Kim, Tae-Sik*
ABSTRACT
Recently, open source in computer science has been widely accepted. The Dronecode project with
ROS(robot operating system) middleware is an open-source, collaborative project that brings
together existing and future open-source drone/robotics projects for unmanned aerial vehicle(UAV).
This result will be a common, shared open source platform for UAV. In this paper, the
comprehensive description of open-source based flight controller and mission computer for small
UAV will be presented.
초 록
컴퓨터 과학 분야에서 오픈소스
(open source)는 하나의 트렌드로 이미 많은 시스템이 스스로 공개하
여 그 영역을 넓혀가고 있으며
, 특별히 소형 드론의 비행제어 및 임무컴퓨터의 개발 흐름은 드론코드
프로젝트
(Dronecode Project) 및 ROS(Robot Operating System)와 같은 기존의 오픈소스 로보틱스 분야
의 협업으로 국가를 뛰어넘는 초월적인 협업이 이루어지고 있는 상태이며
, 소형 무인기 산업계를 이끌
어 가는 원동력이 되고 있다
. 여기서 세계적인 오픈소스 기반 비행제어 및 임무컴퓨터 개발 현황을 살
펴보기로 한다
.
Key Words : Unmanned Aircraft Vehicle(무인항공기), Flight Control Computer(비행제어컴퓨터),
임무컴퓨터
(Mission Computer), Open Platform(개방형 플랫폼)
* 윤원근
, 최인호, 김태식, 한국항공우주연구원 항공연구본부 미래비행체연구단 항공전자연구팀
wkyoun@kari.re.kr, inho@kari.re.kr, kts@kari.re.kr
윤원근 외 / 항공우주산업기술동향 14/2 (2016) pp. 116~123
117
1. 서 론
컴퓨터 과학 분야에서 오픈소스
(open source)는
하나의 트렌드로 이미 많은 시스템이 스스로 공개
하여 그 영역을 넓혀가고 있으며
, 오픈소스란 소프
트웨어 혹은 하드웨어 제작자의 권리를 지키면서
원시 코드를 누구나 열람할 수 있도록 한 소프트
웨어 혹은 오픈소스 라이선스에 준하는 모든 통칭
을 일컫는다
(표. 1).
오픈소스의 이런 경향은
IT 뿐만 아니라, 항공
우주를 비롯한 다양한 분야에서 나타나고 있으며
,
실제로 드론에서도 마찬가지로 나타나고 있다
.
2009년 스위스 취리히 대학의 Lorenz Meier 박사
과정 학생은 학교 프로젝트로 드론 개발을 위해
비행제어 시스템을 개발하였다
. 처음에는 단순하게
시작된 프로젝트는 점점 많은 학생들이 참여하게
되었고
, 컴퓨터비전 분야에서 사용할 UAV 프레임
워크로 진행되었다
.
최근 개발된 비행제어
(Pixhawk) 컴퓨터는 소프
트웨어뿐만 아니라 하드웨어까지 공개함으로써 다
양한 개발자가 참여하게 되었고
, 리눅스 재단은
Pixhawk 프레임워크를 기반으로 인텔, 퀄컴 등과
연대해 드론
OS의 오픈소스화를 위해‘드론코드
(Dronecode)’ 프로젝트를 수행중이다.
이러한 드론코드는 리눅스를 기반으로 한 오픈
소스 업체 간 협의체로
UAV OS와 SW 개발자 키
트
(SDK, Software Development Kit)를 만들고 있
으며
, 현재는 3D 로보틱스, 인텔, 퀄컴 등 다국적
SW 업체뿐 아니라, 하드웨어 업체, 통신사들이 참
여해 빠르게 영향력을 확대하고 있으며
, 오픈파일
럿은 관련 기업들 중심인 드론코드와 달리 개발자
중심의
UAV OS 프로젝트이다. 개발자들 중심으
로 운영돼 커뮤니티 성격이 강하며
, OS 뿐 아니라
UAV 개방형 하드웨어를 함께 개발하고 있다[1].
드론코드 프로젝트는 현재
1,200개 이상의 업체
가 드론코드 개발에 나서고 있으며
, APM/아두파
일럿
, 미션 플래너(Mission Planner), MAVLink와
DroidPlanner 등 몇몇 프로젝트에서는 하루 150개
이상의 코드가 개발되고 있다
. 또한 개발된 플랫폼
은 스카이캐치
(Skycatch), 하비킹(HobbtKing), 호라
이즌
(Horizon Ag), 프레시전호크(PrecisionHawk),
애그리보틱스
(Agribotix), 웰케라 등의 드론 기술
선두 기업들이 채택하여 상용화에 성공하고 있다
(그림. 1). 다음은 소형 드론 분야의 오픈 아키텍처
기반의 개발 현황 및 임무컴퓨터 개발 현황에 대
해서 살펴보고자 한다
.
2. 본 문
소형 드론분야는 기존 군사용으로 시작하여 오
픈플랫폼으로의 전환이 이루어지고 있으며
, 이것을
대중화
시킨
사람은
크리스
앤더스
(Chris
Anderson, 3D 로보틱스 CEO)이다. 실제 기존 소
형 드론이 고가인 이유는 지적재산권의 가격 때문
이었으며
, 이를 파악한 크리스 앤더슨은 오픈소스
의 힘을 이용해서 저렴하고 누구나 만들 수 있는
드론 프로젝트를 시작하게 되고
, 이렇게 시작된 커
뮤니티 사이트인
DIY (Do It Yourself Drones)를
통해 저렴한 드론 시장이 열리기 시작했다
[2].
3D Robotics와 DIY Drones 커뮤니티 간에 이루
어진 무인기 제작을 위한 개방형 드론 플랫폼 구
축 협업 사례를 바탕으로 소프트웨어를 비롯한 최
신
R&D 기술개발 분야에서 활발히 활용되고 있는
개방형 혁신 생태계가 구축되었으며
, 이러한 변화
는 현재의 생산과 고용형태를 획기적으로 변화시
켜
, 사회 전반에 큰 파급효과를 가져오고 있다.
이를 바탕으로 크리스 앤더슨의
DIY 드론스는
요소 기술
설명
오픈소스
하드웨어
(OS HW : Open
Source
Hardware)
․ 해당 제품과 똑같은 모양 및 기능을
가진 제품을 만드는 데 필요한 모든
것(회로도, 자재 명세서, 인쇄 회로
기판 도면 및 개발 환경)을 대중에
게 공개한 전자제품
오픈소스
소프트웨어
(OSS : Open
Source
Software)
․ 오픈소스 소프트웨어 는 소스 코드
를 공개해 누구나 특별한 제한 없이
그 코드를 보고 사용할 수 있는 오
픈소스 라이선스를 만족하는 소프트
웨어
표
1. 오픈플랫폼 정의
118
윤원근 외 / 항공우주산업기술동향 14/2 (2016) pp. 116~123
2007년 첫 해에 25만 달러의 매출을 올린 것을 시
작으로
, 2010년에는 매출이 백만 달러를 돌파하였
으며
, 회사 이름도 3D 로보틱스로 바꾸면서 지속
적으로 성장해서
2015년 2월 인텔, 퀄컴 등에서
5,000만 달러에 이르는 대규모 투자를 유치하면서
최첨단
ICT기술을 접목하는 것에 집중하고 있으
며
, 중국의 DJI를 위협하는 세력으로 급부상하고
있다
[3].
이들이 오픈소스를 사용하는 이유는 디자인을
자유롭게 교환함으로써
“집단지성”을 공유하고 상
용화를 장려하여 사람들이 자유롭게 기술을 제어
할 수 있도록 하기 때문이다
. 또한 최근 들어 DIY
그림
1. 드론코드 프로젝트 현황
제품명
Pixhawk
Arducopter
Openpilot
Paparazzi
Mikro
kopter
KKmulti-
copter
Multiwi
Aeroquad
비행제어
컴퓨터
프로세서
STEM32M4F
(32bit)
ATmega2560
(16bit)
STM32F103
(32bit)
STM32F105
(32bit)
ATmega644
(16bit)
ATmega168
Arduino
(ATmega2560)
Arduino
(ATmega2560)
자세제어
알고리즘
EKF*
NCF*
EKF
NCF
LCF*
ㅡ
LCF
NCF
GPS 기반
경로항법
ㅡ
V
△
V
△
△
△
ㅡ
고도유지
V
V
△
V
V
ㅡ
ㅡ
V
영상처리
V
ㅡ
ㅡ
ㅡ
ㅡ
ㅡ
ㅡ
ㅡ
GCS
V
V
V
V
V
ㅡ
V
V
카메라
안정화
ㅡ
V
V
V
△
V
V
V
표
2. 오픈소스 기반 비행제어 컴퓨터 현황
윤원근 외 / 항공우주산업기술동향 14/2 (2016) pp. 116~123
119
가 하나의 문화로써 자리 잡으면서 오픈소스 하드
웨어의 관심은 점점 커지고 있으며
, 낮은 진입이
용
, 빠르고 유연한 개발, 오픈 포맷과 프로토콜 간
호환성 제공 등의 장점으로 인해 더욱 호응을 얻
고 있다
.
전문 엔지니어나 일반인
, 예술가 등의 개인을
넘어 중소 벤처 기업은 물론 대형 사업자들에까지
미치고 있는 오픈소스 하드웨어의 영향력은 이제
명백히 새로운 산업 트렌드로 자리를 잡아가고 있
다
. 특별히 아두이노(Arduino), 라즈베리 파이
(Raspberry Pi), 비글본(Beaglebon) 등이 급부상하
면서 전 세계적으로 오픈소스 하드웨어에 대한 수
요가 크게 증가하고 있으며
, 현재 오픈소스 하드웨
어는 아직까지 하드웨어 디자인의 로우 엔드
(Low
End)에 위치해 있지만, 산업 및 교육 분야에서의
수요 증가로 인해 결국 전자 제품 디자인의 주류
로 진입할 가능성이 높을 것이다
.
이와 같이 혁신적인 오픈소스의 탄생과 인기몰
이가 꾸준히 명맥을 이어 간다면
, 업계가 급속히
영향력을 확대해 나갈 가능성도 충분할 것으로
기대되는 바이며
[4], 특별히 소형 드론분야에 있어
서 오픈소스를 기반으로 다양한 비행제어컴퓨터
가 출시되어 사용되고 있으며
, 상용화에 성공하였
다
(표. 2).
2.1 ROS(Robot Operating System)
ROS(Robot Operating System)은 로봇용 공개소
스 메타 운영체제이다
[5]. ROS는 일반 운영체제에
서 제공하는 하드웨어 추상화
, 저수준기기 제어,
빈번히 사용되는 기능들이 구현되어 있으며
, 프로
세스 간 메시지 전달
, 패키지 관리 기능 등을 제공
한다
. 또한, ROS는 여러 컴퓨터 시스템 작동하는
코드를 얻어오고
, 빌드하고, 작성하고, 실행하기 위
한 도구 및 라이브러리를 제공하며
, 기존의 로봇,
무인 이동체 분야에서 개발된 많은
SW와 시뮬레
이션 툴인
Gazebo 등으로 드론에서 임무컴퓨터의
Open-Source로 자리매김하여 많은 개발자들이 참
여하고 있으며
, ROS가 호응 받고 있는 이유는 다
음과 같다
(그림. 2).
첫째
, 프로그램의 재사용성이다. 개발자는 개발
하고자 하는 부분에 집중하고 나머지 기능에 대해
서는 관련 패키지를 다운로드하여 사용할 수 있으
며
, 자신이 개발한 프로그램은 다른 이들이 사용할
수 있도록 공유할 수도 있다
. 예를 들어, 미국
NASA의 경우 국제 우주 정거장에서 사용하는 로
보노트
2(Robonaut2) 로봇 제어를 위하여 자체 프
로그램 이외에도 다양한 드라이버 기능과 멀티 플
랫폼에서 사용 가능한
ROS와 실시간 제어, 메시지
통신 복구
, 신뢰성을 갖춘 OROCOS를 혼용함으로
써 우주에서 임무를 수행할 수 있었다
.
그림
2. ROS 생태계 현황[5]
120
윤원근 외 / 항공우주산업기술동향 14/2 (2016) pp. 116~123
둘째
, 통신 기반 프로그램이다. 일반적으로 하나
의 서비스를 제공하기 위하여 센서나 액추에이터
단의 드라이브부터 센싱
, 인식, 동작까지 하나의
프레임에서 프로그램을 작성하는 것이 많은데 로
봇 소프트웨어의 재사용을 위해서는 이를 각각 처
리 프로세서의 목적에 따라 작게 나누게 된다
. 플
랫폼마다 이를 컴포넌트화 혹은 노드 패키지화라
고 한다
. 최소 실행 단위로 나뉜 프로그램은 나누
어진 컴포넌트
(노드)끼리 데이터를 주고받아야 하
는데 플랫폼들은 이 데이터 통신에 대한 전반적인
사항을 모두 갖추고 있다
. 각 컴포넌트는 하드웨어
의존성을 떠나 네트워크에서 통신을 제공함으로써
네트워크 프로그래밍이 가능하게 되고 로보틱스에
서 흔히 다루는 원격제어에서 매우 유용하다
. 또
한
, 최소 실행 단위로 프로그램을 나누게 되면 작
은 단위로 디버깅할 수 있어서 오류를 찾아낼 때
도 매우 유용하다
.
셋째
, 개발도구 지원이다. ROS의 경우 디버깅
관련 툴
, 2차원 플롯과 3차원 시각화 툴을 제공함
으로써 로봇 개발에 필요한 개발 도구를 사용할
수 있다
. 예를 들어, 로봇 개발에 있어서 로봇의
모델을 시각화하는 경우가 많은데 이를 정해진 포
맷에 맞추기만 하면 로봇의 모델을 직접 확인할
수 있을 뿐만 아니라
3차원 시뮬레이터도 제공하
기 때문에 시뮬레이션으로의 확장도 용이하다
. 또
한
, 요즘 주목받는 마이크로소프트사의 키넥트 등
으로 얻은
3차원 거리 정보는 3D pointcloud 형태
로 쉽게 변환하여 보여준다
. 그 이외에도 실험에서
사용된 데이터는 녹화할 수 있으므로 언제든지 필
요할 때 재생하여 실험할 때의 상황을 그대로 재
현할 수도 있다
. 이처럼 로봇 개발에 꼭 필요한 소
프트웨어 도구를 제공하여 개발 편의성을 극대화
한 점이 중요한 원인 중의 하나이다
.
넷째
, 생태계 조성이다. 스마트폰 혁명은 안드로
이드와
iOS 등 소프트웨어 플랫폼이 만든 생태계
가 있기 때문이라고 한다
. 로봇 분야도 마찬가지
흐름으로 이어 가고 있다
. 처음에는 각종 하드웨어
기술들이 넘쳐흘렀으나
, 이를 통합해 줄 운영체제
가 전무했다
. 이 상황에서 앞서 설명했던 것과 같
이 다양한 소프트웨어 플랫폼이 등장했고
, 가장 주
목 받은
ROS의 경우 이제 그 생태계의 틀을 갖추
기 시작했다
. 그리고 로봇과 센서 회사처럼 로봇
관련 하드웨어 분야의 개발자
, ROS 개발 운용팀,
응용 소프트웨어 개발자
, 사용자가 선순환적 생태
계를 만들어 가고 있다
.
다섯째
, 활성화된 커뮤니티이다. 지금까지 닫혀
있던 로봇 학계
, 로봇 업계는 위에서 언급한 기능
들로 인하여 서로 협업을 중시하는 방향으로 나아
가고 있으며
, 이러한 소프트웨어 플랫폼을 통하여
협업이 실제로 이루어지고 있다
. 이 중심에는 오픈
소스 소프트웨어 플랫폼의 커뮤니티가 있다
. 예를
들어
ROS의 경우에는 자발적으로 1,600개 이상의
패키지들이 개발되어 공유되고 있고
, 그 사용 방법
을 설명한 위키 페이지가 사용자들의 개별적인 참
여로
14,600페이지를 넘어서고 있다. 그리고 커뮤
니티에서 매우 중요한 질의응답의 경우
18,000건
이상이 오고 가며 상생의 커뮤니티를 만들어 가고
있다
.
이는 단순히 사용법에 대한 토론을 넘어서 로보
틱스 소프트웨어에서 필요한 구성요소를 찾아내고
규칙을 만들고 있다
. 나아가 로보틱스의 발전을 위
해 로봇의 소프트웨어가 갖추어야 할 부분에 대해
서 고민하고 부족한 부분은 서로 협업을 통하여
다수가 하나의 퍼즐을 맞추는 식으로 발전하고 있
다
. 실제로 모바일 로봇에서 시작된 ROS의 인기는
소형 드론에도 확산되어 다음과 같이 많은 소형
무인기가
ROS 프레임 워크를 사용하고 있으며(표.
3), 오픈 로보스 생태계를 이루고 있다.
ROS 기반 UAV 제품
제품
- AscTec Pelican and Hummingbird Quadrotors
- Berkeley's STARMAC
- Bitcraze Crazyflie
- DJI M100/M600 Onboard SDK ROS support
- Erle-copter
- ETH sFly
- Parrot AR-Drone
- Parrot Bebop Drone
- Penn's AscTec Hummingbird Quadrotors
- PIXHAWK MAVs
- Skybotix CoaX Helicopter
표
3. ROS 기반 UAV 제품

윤원근 외 / 항공우주산업기술동향 14/2 (2016) pp. 116~123
121
2.2 소형 무인기 임무컴퓨터 현황
그림
3. DJI 임무컴퓨터(Manifold)
소형 드론의 전용 임무컴퓨터를 처음 출시한 곳
은 드론 업계
1위의 DJI사이다. DJI사는 엔비디아
(Nividia TK1)의 쿼드코어 2.2GHz ARM Cortex
A-15 프로세서를 장착하고 있으며, 192 CUDA
Core를 장착하여 강력한 이미지 처리능력을 가지
며
, 효율적인 병렬 컴퓨팅이 가능하다. 또한 리눅
스 계열의 우분투
(Ubuntu 14.04) OS 기반의 ROS
가 지원되도록 하였다
. 이를 통해 LiDAR 및 스테
레오 카메라의 신호처리
/영상처리가 실시간으로
가능해져 다양한 어플리케이션으로 확장이 가능해
졌다
(그림. 3).
그림
4. 퀄컴의 스냅드래곤
또한
2016년 2월에 출시된 Qualcomm사의
SnapDragon Flight 통합컴퓨터는 Pixhawk 기반의
비행조종
(FC)컴퓨터와 임무(MC) 컴퓨터를 통합한
고성능
2.26GHz(Quad-core Qualcomm CPU) 기반
의
One-Chip Solution의 탑재컴퓨터로 많은 미디
어매체의 관심을 받고 있으며
, 소형드론의 스마트
기술 적용 및 지능화를 위한 고성능의
SWaP-C 절
감 탑재컴퓨터로 획기적 제품으로 지대한 관심을
받고 있다
(그림. 4).
그림
5. 패롯(Parrot) 슬램덩크(Slam Dunk)
이에 더불어
DJI와 소형드론 분야의 양대 축을
담당하고 있는
Parrot사는 고성능의 영상처리가 가
능한
GPU(Graphic Processor Unit)을 포함하는 엔
비디아
(Nividia TK1) 기반 임무컴퓨터를 출시하였
다
. 또한 리눅스 계열의 우분투(Ubuntu 14.04) OS
기반의
ROS가 지원되도록 하였으며, 스테레오 카
메라를 장착해 초당
60 프레임, 1500x 1500의 해상
도를 구현할 수 있다
(그림. 5).
궁극적으로
Parrot사는 임무컴퓨터를 통해 GPS
가 작동하지 않는 실내 공간 등에서 위치 및 방향
을 알 수 있는
SLAM(Simultaneous Localization
and Mapping) 기술을 지원한다는 의미를 담고 있
다
. 이 임무컴퓨터를 활용하면 실내에서 자율이동,
및 충돌회피 기능이 수행이 가능하며
, 드론뿐만 아
니라 다른 로봇에도 탑재 할 수 있다
.
위와 같이 최근 해외의 경우 소형 드론의 다양
한 임무를 위해서 고성능 신호 및 영상처리가 가
능하여
, LiDAR 및 스테레오카메라를 실시간으로
처리할 수 있는 고성능의 임무컴퓨터가 출시되고
있다
, 또한 이 임무컴퓨터를 활용해서 적외선 카메
라
, 대기권 연구장치, 지리조사 장비 등과 연결이
가능하며
, 더욱 강력한 기능의 전문 애플리케이션
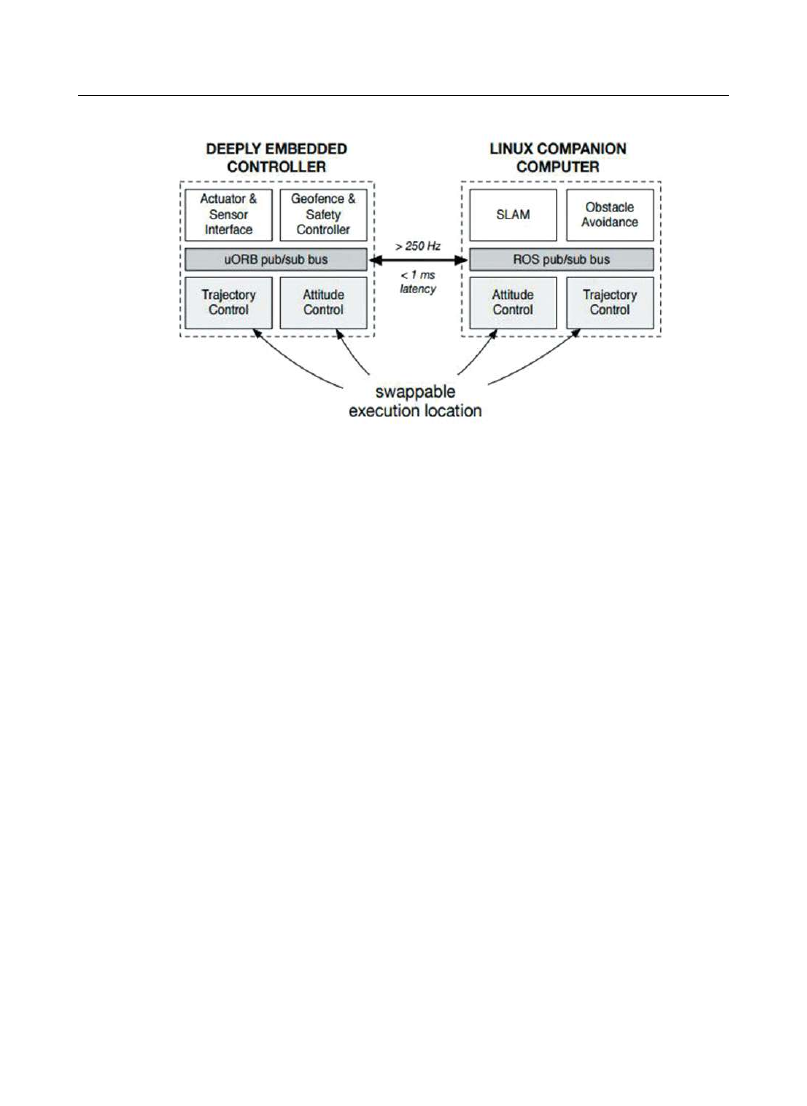
122
윤원근 외 / 항공우주산업기술동향 14/2 (2016) pp. 116~123
을 개발할 수 있을 것으로 예상되며
, 이를 통해 국
내와 해외와의 기술격차가 점점 커질 것으로 예상
된다
.
이에 더불어 소형 드론의 임무컴퓨터의 개발 흐
름은 드론코드 프로젝트 및
ROS와 같은 기존의
오픈소스 로보틱스 분야의 협업 해결책으로 국가
를 뛰어넘는 초월적인 협업이 이루어지고 있는 상
태이다
.
2.3 국내 기술 현황 및 개선 방안
국내의 드론 시장 규모와 업체 수는 크게 증가
하고 있으나 외형적인 하드웨어 제작에 집중되는
상황이다
. 주요 이유로는 국내업체의 경우 내부 소
프트웨어 기술이 없어서 대부분 비행제어컴퓨터
및 임무컴퓨터가 장착된 제품을 구입하고 있으며
,
이를 이용하여 사용자 입장에서 미리 정해진 조작
만이 가능한 수준이다
. 또한 항법, 신호처리, 제어
등을 관리하는 종합적인 핵심 소프트웨어 및
OS
개발 없이는 해외 수입에 의존할 수밖에 없는 상
황이다
.
따라서
, 국내 영세 기업의 자체 프레임워크를
기반으로 개발을 하기 보다는 전 세계적인
Open-Source Frame Work를 활용하는 방향으로
선회해야 한다
(그림. 6). 즉, 비행제어컴퓨터는 드
론코드 프로젝트의
PX4(Pixhawk) 기반으로 개발을
하고
, 임무컴퓨터의 경우는 ROS 기반으로 개발을
통해 오픈소스 로보틱스 분야와의 협업을 통해 해
외시장 진출을 시도해야 한다
.
특별히
ROS의 경우 학계 연구자, 산업현장의
개발자
,
그리고 취미로 활동하는 하비스트
(hobbyist)까지 개발에 참여하고 있으며, 로봇 전공
자뿐만 아니라 네트워크 전문가
, 컴퓨터 사이언스,
컴퓨터 비전 분야의 사람들도 대거 참여하고 있어
서 로봇 분야뿐만 아니라 다양한 배경의 지식이
모여 융합을 이루고 있어서 로봇공학이 지금까지
와는 다른 양상으로 발전할 것으로 예상된다
.
3. 결 론
소형 무인기의 오픈 아키텍쳐 기반 비행제어
/임
무컴퓨터 개발 현황을 조사한 결과
. 국내의 소형
드론 개발진도 전 세계적인
Open-Source Frame
Work에 참여하여, 비행제어컴퓨터는 드론코드 프
로젝트의
PX4(Pixhawk), 임무컴퓨터는 ROS을 기
반으로 추진하면
, 지금까지 풀지 못한 숙제들을 효
율적으로 풀 수 있을 것으로 생각한다
.
그림
6. 비행제어컴퓨터 및 임무컴퓨터 개발 방안[3]

윤원근 외 / 항공우주산업기술동향 14/2 (2016) pp. 116~123
123
후기
본 연구는
“오픈아키텍처 기반 무인이동체 비행
조종 및 다중임무 통합 컴퓨터 개발
(SR16120)”의
지원을 받아 수행되었습니다
.
참고문헌
1. Lorenz Meier, Dominik Honegger and Marc
Pollefeys, PX4: A Node-Based Multithreaded
Open Source Robotics Framework for Deeply
Embedded Platforms”, ICRA (Int. Conf. on
Robotics and Automation) 2015.
2. SungTae Moon, Wesub Eom, Hyunchul
Gong,“Development of Large-Scale 3D Map
Generation System for Indoor Autonomous
Navigation Flight – work in progress”,
APISAT (Asia-Pacific International Symposium
on Aerospace Technology) 2014
3. Drone Code, https://www.dronecode.org/
4. Open Pilot, https://www.openpilot.org/
5. ROS, http://www.ros.org
항공우주산업기술동향 14권 2호 (2016) pp. 124~131
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
NASA 우주시스템 전자파규격 기술동향
김태윤*
1 )
, 장재웅**, 장경덕***, 문귀원****
EMC standard for NASA space center
Taeyoun Kim*, Jaewoong Jang**, Kyungduk Jang***, Gueewon Moon****
ABSTRACT
In case of modern satellite and launch system, as the electronic equipment using high-speed
signal for providing and processing the large dataset in real time increases, the effect of EMI on
system such as power integrity and signal integrity is gradually growing worse. Therefore EMC
regulations on satellite platform are being strengthened to achieve a reliable system performance.
NASA GSFC(Goddard Space Flight Center) has the EMC requirements as defined in the General
Environmental Verification Specification (GEVS),GSFC-STD-7000. These requirements were based on
the requirements of MIL-STD-461C and the test methods of MIL-STD-462. In this paper, updated
EMC requirements of NASA GSFC will be introduced for consideration of practical and accurate
EMC standard.
초 록
위성 및 발사체시스템의 경우 다양한 정보를 실시간으로 제공하고 처리하기 위해 고속 신호를 사용
하는 전자장비의 사용이 많아짐에 따라
power integrity 및 signal integrity 등 EMI에 의한 시스템 영
향성이 커지고 있다
. 따라서 안정적인 시스템 성능 구현을 위해 시스템을 구성하는 전자장비에 대한
전자파적합성 대책 및 평가에 대한 규제를 강화하고 있다
. 세계 우주시스템 개발을 주관하는 대표적인
기관인
NASA에서는 자체적인 전자파규격을 가지고 있으며 이는 미군사규격 MIL-STD-461C와
MIL-STD-462를 근간으로 제정되었다. 본 논문에서는 미국 항공우주국 고다드 우주센터(NASA GSFC)
에서 개정한 전자파규격에 대해 살펴보고 이를 계기로 실질적이고 정확한 전자파규격 및 측정방법에
대한 고민을 하고자 한다
.
Key Words : EMC, GSFC, GEVS, MIL-STD-461F, Conducted, Radiated, Emission, Susceptibility,
LISN
* 김태윤, 장재웅, 장경덕, 문귀원, 한국항공우주연구원, 위성연구본부 위성기술연구단 우주시험실
kity@kari.re.kr, j w0302@kari.re.kr, kdjang@kari.re.kr, aeromoon@kari.re.kr
김태윤 외 / 항공우주산업기술동향 14/2 (2016) pp. 124~131
125
1. 서 론
전자파문제는 휴대폰을 포함한 각종 전기전자
기기들을 사용하는 현대의 생활환경에서는 필수적
인 장해현상이 되었으며
, 이는 다양한 전자장비들
이 좁은 공간에 밀집되어 있는 위성 및 발사체 등
의 우주시스템에서도 예외가 아니다
. 전자파문제란
불필요한 전자파신호에 의해 원하는 신호의 탐지
및 해석에 간섭을 초래하거나 장비의 성능저하를
일으키는 현상으로
, 전자장비 자체적으로 방출하는
전자파노이즈를 최소한으로 억제하고 외부 전자파
노이즈에 대해 오동작 없이 정상적으로 동작하는
상태를 전자파적으로 적합하다고 판단하고 있으며
,
이는 전자파적합성
(Electromagnetic Compatibility,
EMC)을 확보했음을 의미한다.
위성 및 발사체시스템의 경우 다양한 정보를 실
시간으로 제공하고 처리하기 위해 고속의 신호를
사용하는 전자장비의 사용이 많아짐에 따라 장비
자체에서 방사되는 전자파잡음의 세기가 증가되고
잡음주파수 대역도 수십
GHz까지 확장되고 있으
며
, 저전력소모 회로 설계가 일반화됨에 따라
power integrity 뿐만 아니라 signal integrity 등
EMI에 의해 시스템 전체 기능에 미치는 영향이 커
지고 있다
. 따라서 안정적인 시스템 성능 구현을
위해 시스템을 구성하는 전자장비에 대한 전자파적
합성 대책 및 평가에 대한 규제를 강화하고 있다
.
본 논문에서는 미국 항공우주국 고다드 우주센
터
(NASA GSFC)에서 개정한 전자파규격에 대해서
살펴보고 향후 위성시스템에 대한 전자파규격에
대한 적용방안에 대해서 고찰하고자 한다
.
2. 본 문
2.1 GSFC-STD-7000A 전자파규격
미국 항공우주국 고다드 우주센터
(Goddard
Space Flight Center, GSFC)에서 개발하는 모든 탑
재체
, 서브시스템 및 전장박스는 General
Environmental Verification Specification (GEVS),
GSFC-STD-7000A[1]에서 규정하고 있는 전자파규
격에
따라
개발
,
검증하고
있다
.
GSFC-STD-7000A는 GSFC 우주프로그램을 위한
환경시험 전체에 대한 규격을 정의하고 있으며 이
중 전자파규격은 미군사규격
MIL-STD -461C[2]와
MIL-STD-462[3]를 근간으로 제정되었다. 최근 규
격이 개정되기 전 주요 변경이 적용된 마지막 버
전은
1993년에 발행된 것으로, 빠르게 변화하는 위
성체 임무에 따른 현대의 전자파문제를 해결하는
데는 기술적인 한계를 가지고 있었다
. 예를 들어
일부사항은 지나치게 엄격하여 과도하게 보수적으
로 설계를 하거나 불필요한 면제처리에 많은 시간
과 비용을 투자하게 하였으며
, 반대의 경우 박스나
서브시스템 수준에서 놓친 문제가 종종 시스템에
서 문제를 해결하는 데 더 많은 시간과 비용을 초
래할 만큼 충분히 엄격하지 않기도 하였다
. 이에,
2010년부터 GSFC의 EMC working group에서 전
자파규격의 개정을 논의하기 시작하였으며
2013년
에 발행된
GSFC-STD-7000A에는 개정된 전자파규
격이 적용되었다
. 개정된 전자파규격은 당시의 미
군사규격 최신버전인
MIL-STD- 461F[4]의 규격과
시험 방법을 바탕으로 하였으나
, 이외에도 우주정
거장의 전자파규격과 미국 공군에서 정의하는 전
자파규격을 시스템 실정에 맞게 변경하여 제정하
였다
.
2.2 전원소스 임피던스
GSFC 전자파규격에서 정의하고 있는 전자파시
험 구성은
<그림 1>과 같다. 주요 변경사항으로는
전원선 임피던스 안정화 회로망
(LISN)을 대신하여
캐패시터 네트웍이 연결되어 있다
. LISN의 목적은
실제 설치 환경에서 예상되는 임피던스를 대표할
수 있는 표준화된 전원소스 임피던스를 제공하는
것으로
, 서로 다른 시험장 간에 일관된 측정 결과
를 제공하기 위한 것이다
. MIL-STD-461F에서는 시
편의 전원선에 직렬로
LISN을 사용하도록 정의하
고 있으며
, LISN 임피던스는 <그림 2>와 같이 대
형 군사용 플랫폼의 최악의 전원선 분배 임피던스
를 모사하기 때문에 이는 일반적인 위성플랫폼에
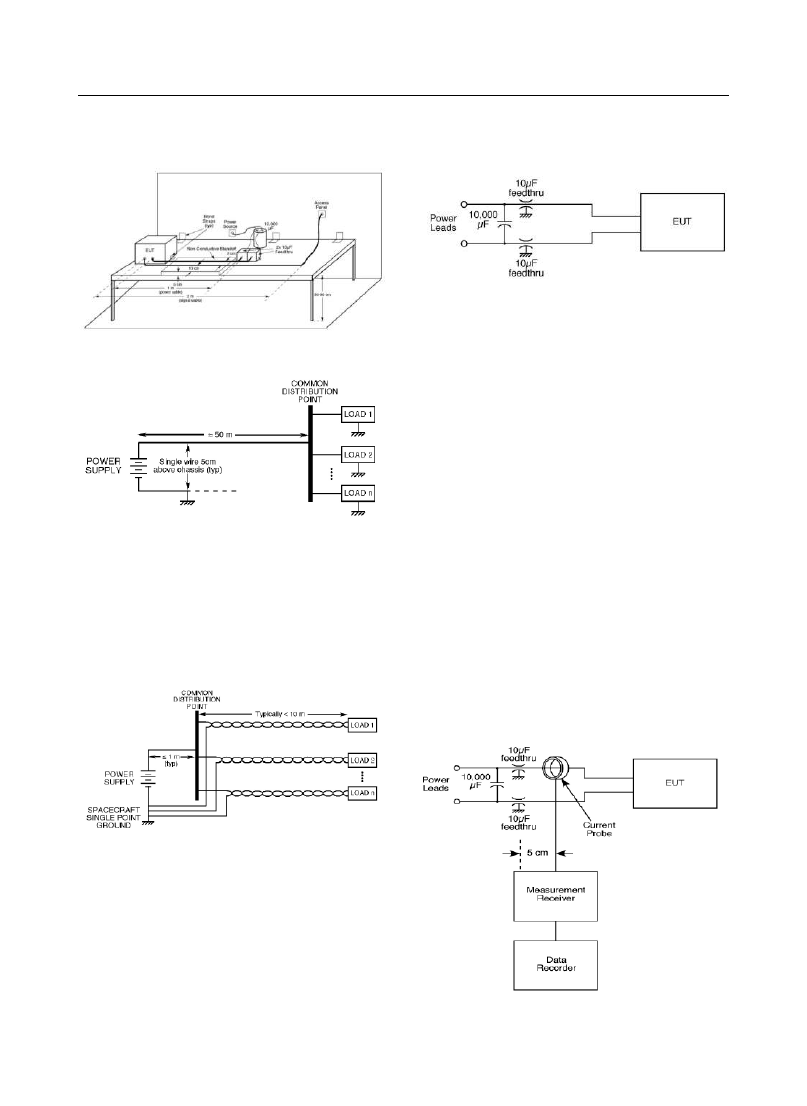
126
김태윤 외 / 항공우주산업기술동향 14/2 (2016) pp. 124~131
서의 전원선 분배형상과는 차이가 있다
.
그림
1. 기본 전자파시험 구성
그림
2. 대형 군사용 플랫폼의 전원분배도
<그림 3>은 GSFC 플랫폼의 전형적인 전원선
분배도를 보여준다
. 이 경우에 버스 임피던스는
<그림 4>와 같은 캐패시터 네트웍에 의해서 더 정
확하게 모사할 수 있다
.
그림
3. 일반적인 위성플랫폼 전원분배도
따라서
GSFC-STD-7000A에서는 전자파시험을
수행할 때 시편에 전원을 제공하는 전원소스의 임
피던스를
<그림 4>와 같은 캐패시터 네트웍을 통
해 컨트롤 하도록 정의하고 있으며
, 이 캐패시터
네트웍은
GSFC 플랫폼의 주요한 전원버스인 배터
리를 모사하는 것으로
, MIL-STD-461F에서 정의하
는
LISN을 대신하게 된다.
그림
4. 배터리에 의한 버스임피던스를 모사하는
캐패시터 네트워크
2.3 전원선에 대한 전도성 방출
2.3.1 주파수영역 전도성 방출
전통적인 전도성 방출시험 방법은 싱글엔드 전
원과 접지간 전류측정으로
, <그림 5>와 같은 측정
방법은 구조체를 전류 귀환경로로 사용하는 경우
에서부터 시작되었다
. 하지만 GFSC에서 개발하는
모든 플랫폼의 전원 분배 방식은 전용의 전류귀환
경로를 제공하고 있어 현재의 설계방식과는 차이
가 있으므로 개정된 전자파규격에서는 전도성방출
에 대한 측정방식을
<그림 6>과 <그림 7>과 같이
변경하였다
. 또한 전도성 노이즈원을 식별하거나
잠재적인 영향을 평가하는데 더욱 유용한 정보를
제공하기 위해 차동모드와 공통모드에 대한 측정
을 분리하도록 정의하고 있다
. <그림 8>은 차동모
드에 대한 전도성방출 규격이고
, <그림 9>는 공통
모드에 대한 전도성방출 규격을 나타낸다
.
그림
5. 전통적인 전도성 방출시험 셋업
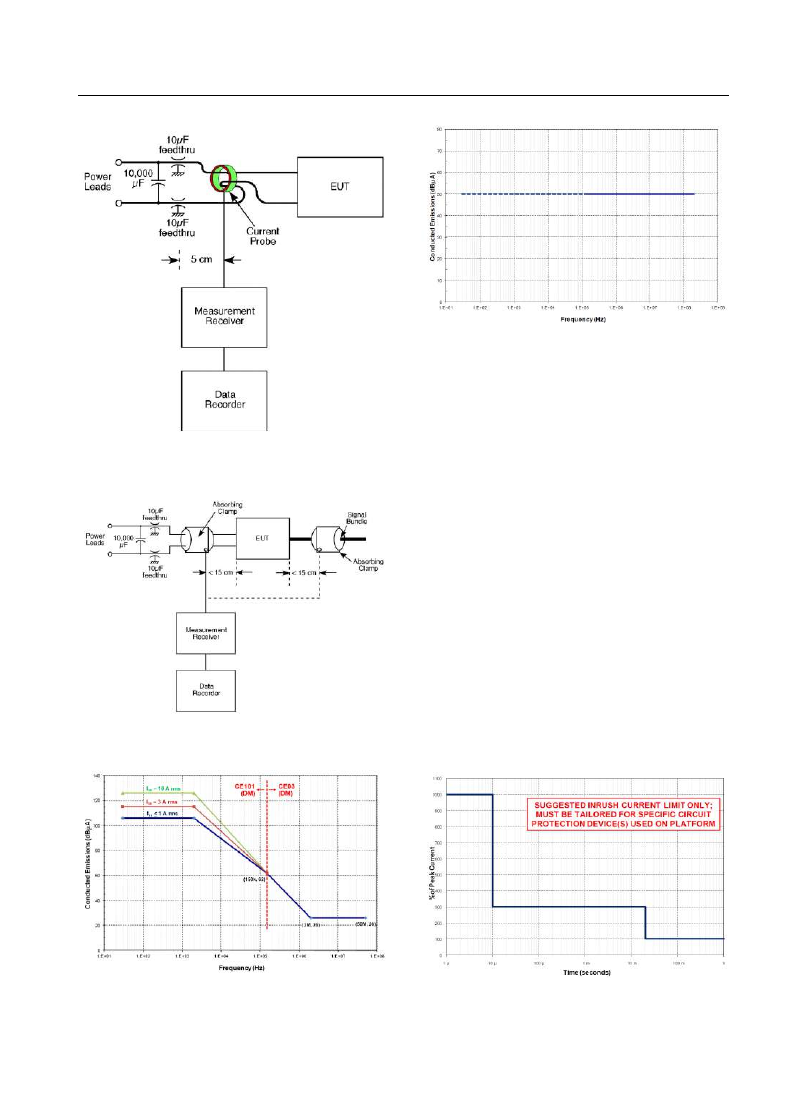
김태윤 외 / 항공우주산업기술동향 14/2 (2016) pp. 124~131
127
그림
6. GSFC 전도성 방출 시험 셋업 (차동모드)
그림
7. GSFC 전도성 방출 시험 셋업(공통모드)
그림
8. GSFC 전도성 방출(차동모드) 규격
그림
9. GSFC 전도성 방출(공통모드) 규격
2.3.2 시간영역 전도성 방출(인러쉬 전류)
GSFC 플랫폼에서는 전원 입력단에서 발생하는
인러쉬 전류
(과도돌입전류)에 대한 요구조건을 새
롭게 정의하였다
. 인러쉬전류에 대한 규격은
MIL-STD-461F 에서는 명시되어 있지 않지만, 우주
정거장에 대한 전자파규격
[5]이나 미 공군에서 정
의하는 위성 시스템 및 전장박스에 대한 전자파규
격
[6]에서는 전원이 인가되었을 때의 과도현상에
대한 요구조건이 정의되어 있다
. 하지만 두 문서에
서 정의하는 과도현상은
LISN 양단에서의 전압측
정으로 명시되어 있어 실제
GSFC 플랫폼에 적용
하기는 적합하지 않다
. 이러한 이유로 개정된 전자
파규격에는
<그림 10>과 같이 전류관점에서 퓨즈
보호에 직접적으로 연관되는 인러쉬전류에 대한
요구사항을 제안하였다
. 인러쉬전류에 대한 규격은
전원 보호소자의 특성에 맞게 변경이 가능하다
.
그림
10. GSFC 인러쉬전류 규격
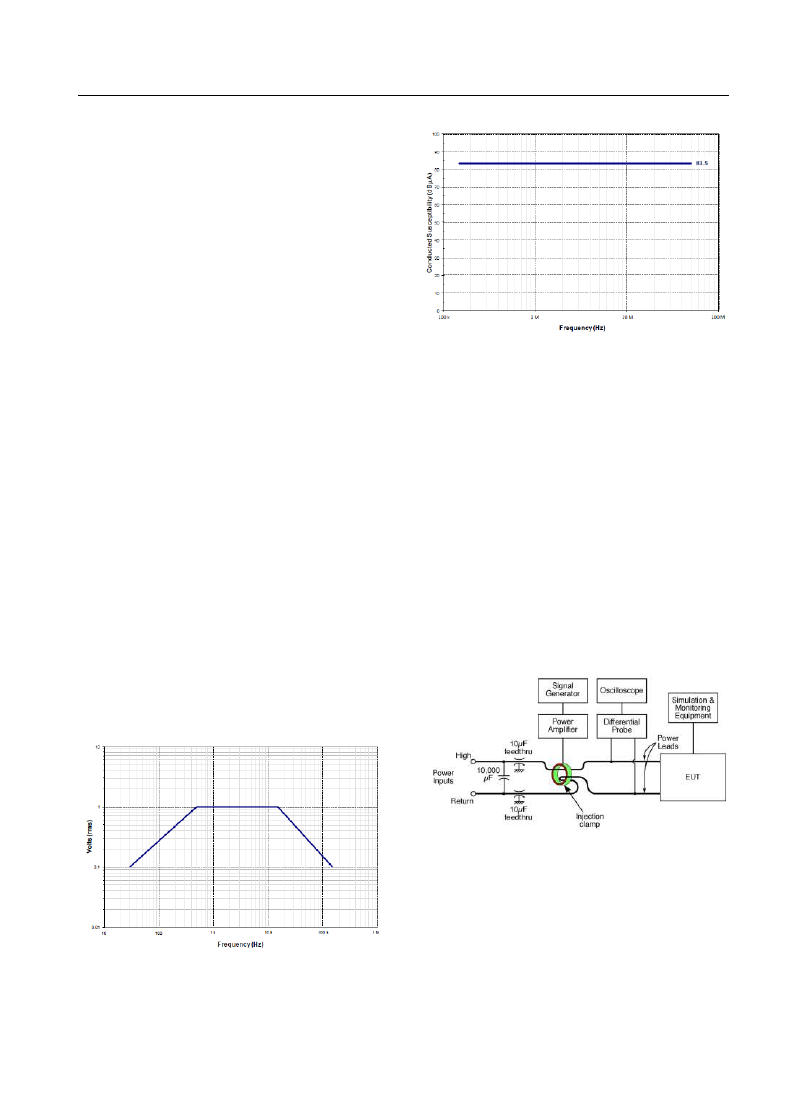
128
김태윤 외 / 항공우주산업기술동향 14/2 (2016) pp. 124~131
2.4 전원선/신호선에 대한 전도성 감응
2.4.1 차동모드에 대한 전도성 감응
MIL-STD-461F의
전도성
감응
규격은
MIL-STD-704에서 정의하는 전기기계식 전원소스
를 바탕으로 마진을 포함하여 정의되어 있으며
, 전
기기계식 전원소스는 자체적으로 발생하는 과도한
고유노이즈를 포함하기 때문에
MIL-STD-461F의
전도성감응 규격은 매우 높게 나타난다
. 하지만
GSFC 플랫폼의 전원시스템은 수백 Hz에서 수백
kHz 주파수 대역에서 동작하는 Pulse Width
Modulation(PWM) 방식을 사용하고 있으며, PWM
주파수에서 자체적으로 발생하는 노이즈는 전기기
계식 전원소스보다 현저히 낮게 발생한다
. 따라서
개정된 전자파규격에서는 전원선에 대한 전도성
감응 규격을
<그림 11>과 <그림 12>와 같이
MIL-STD-461F보다 낮게 정의하였다.
<그림 11>은 30 Hz ~ 150 kHz 주파수 대역에
대한 전도성 감응 규격이며
<그림 12>는 150 kHz
~ 50 MHz 주파수 대역에 대한 전도성 감응 규격
이다
. 주파수 대역에 따라 측정방법이 달라서 규격
이 구분되어 있으며
, 150 kHz ~ 50 MHz 주파수
대역의 전도성 감응 시험은
MIL-STD-461F의
CS114 시험방식을 적용할 수 있다. 이 경우 83.5
dbuArms 의 전류 규격은 전압으로 변환했을 때는
1Vrms에 해당된다.
그림
11. GSFC 전도성 감응 규격
(30 Hz to 150 kHz 전원선 정현파인가)
그림
12. GSFC 전도성 감응 규격
(150 kHz to 50 MHz 전원선 정현파인가)
개정된
GSFC 전자파규격에서는 30 Hz ~ 150
kHz 주파수 대역의 전도성 감응 시험방법도 새롭
게 제안하고 있다
. MIL-STD-461F CS101 시험 방
법은 전원선에 직접 연결하는 방식으로
, 부주의한
경우 과도한 노이즈가 바로 인가될 수 있어 잠재
적인 위험도가 매우 높은 방식이다
. 이에 대한 대
안으로
, GSFC에서는 <그림 13>과 같이 CS114 방
식와 유사한 측정방법을 제안하고 있다
. 제안하는
방식은 전원선에 직접 연결하는 커플링 트랜스포
머 대신에 클램프 타입의 프로브를 사용하는 방법
이다
.
그림
13. GSFC 전도성 감응시험 셋업
(30 Hz ~ 150 kHz, 차동모드)
2.4.2 공통모드 전도성 감응
<그림 14>는 전원선 및 신호선에 대한 공통모드
전도성 감응규격을 보여준다
. 공통모드에 대한 전
도성 감응 규격은 케이블간의 간섭현상
(crosstalk)
에 대한 내성을 평가할 수 있게 한다
.
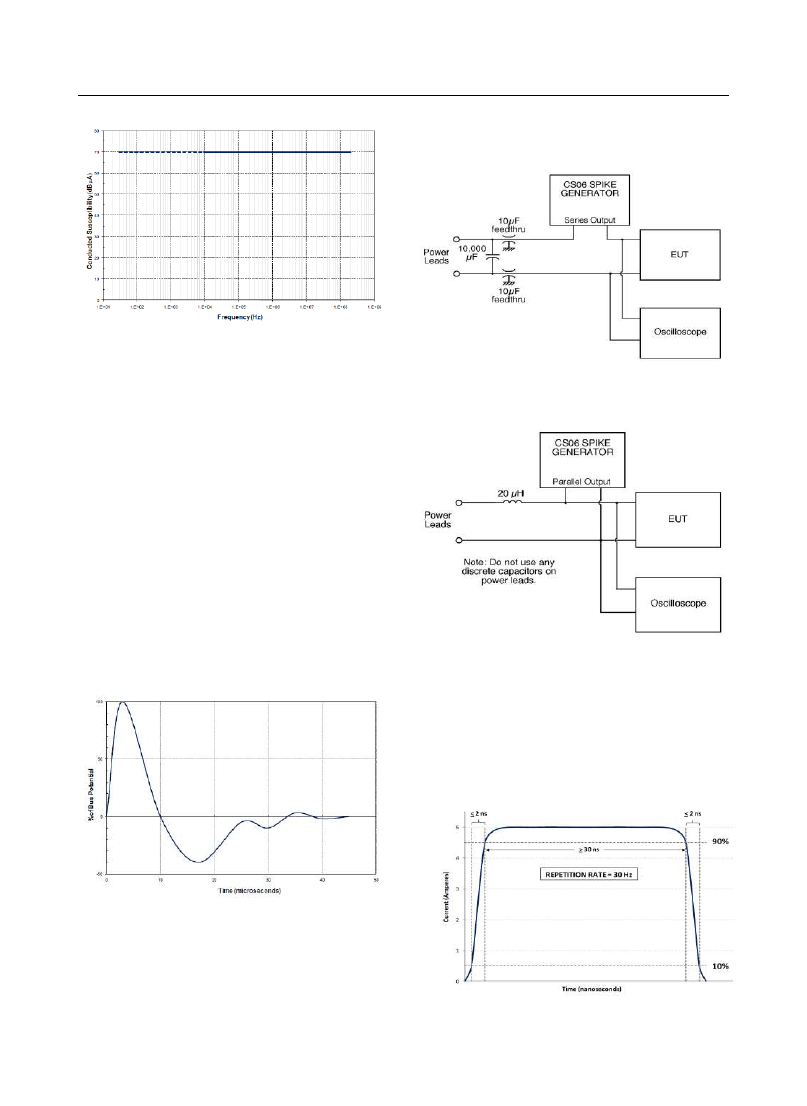
김태윤 외 / 항공우주산업기술동향 14/2 (2016) pp. 124~131
129
그림
14. GSFC 전도성 감응규격(10 kHz to 200 MHz
전원
/신호선 공통모드 정현파인가)
결과적으로
GSFC 전자파규격은 공통모드에 대
한 전도성 방출규격과 전도성 감응규격 간
20 dB
의 마진을 갖도록 정의하고 있다
.
2.4.3 과도전압에 대한 전원선 전도성 감응
MIL-STD-461F의 CS106 규격은 400Vac로 동작
하는 군함이나 잠수함 장비를 기준으로 정의되어
있다
. 반면 위성 플랫폼은 28Vdc 또는 50Vdc를 사
용하기 때문에 이 규격은 불필요하게 과도하여 우
주정거장의 전자파규격과 미국 공군에서 정의하는
전자파규격를 참고로
<그림 15>와 같은 과도전압
에 대한 전도성감응 규격을 정의하였다
.
그림
15. GSFC 전도성감응 규격(과도전압)
과도전압에 대한 전도성감응 시험셋업은
<그림 16>
과
<그림 17>과 같다. <그림 16>은 과도전압에 대한
직렬인가 방식이며
<그림 17>은 병렬인가 방식으로,
부하 전력이 클 경우에는 병렬인가 방식을 적용한다
.
그림
16. GSFC 과도전압에 대한 전도성 감응
시험셋업
(직렬인가 방식)
그림
17. GSFC 과도전압에 대한 전도성 감응
시험셋업
(병렬인가 방식)
2.4.4 임펄스 신호에 대한 전도성 감응
MIL-STD-461F의 CS115 규격과 동일하며 전원
선과 신호선의 임펄스 신호에 대한 전도성 감응
규격에 해당한다
.
그림
18. GSFC 전도성감응 규격(임펄스신호)
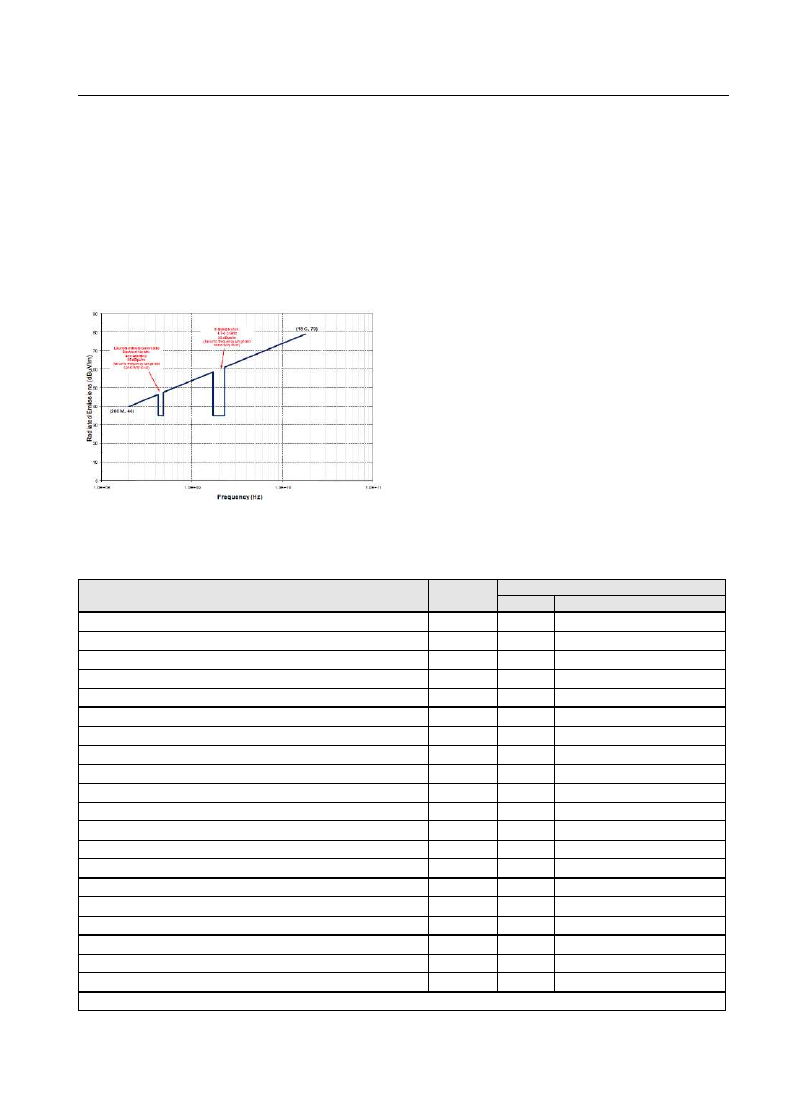
130
김태윤 외 / 항공우주산업기술동향 14/2 (2016) pp. 124~131
2.5 복사성 방출
자기장에
대한
복사성
방출
규격은
MIL-STD-461F의 RE101 규격과 동일하며, 전기장
에 대한 복사성 방출 규격은 위성에서 사용하는
RF 수신주파수에 대한 노칭 및 발사체에서 사용
하는
RF 수신주파수에 대한 노칭을 포함하여 <그
림
19>와 같은 규격을 제안하고 있다.
그림
19. GSFC 전기장 복사성 방출 규격
2.6 복사성 감응
자기장에
대한
복사성
감응
규격은
MIL-STD-461F의 RS101 규격과 동일하며, 전기장
에 대한 복사성 감응 규격은
2 MHz ~ 18 GHz
주파수 대역에서
20 V/m로 명시하고 있다. 이 규
격은 발사체나 발사장에서 동작하는
RF 송신주파
수에 의한 일반적인 전기장세기를 기준으로 정의
하였다
.
2.7 GSFC 전자파규격 요약
<표 1>은 GSFC 전자파규격의 모든 항목을 나
타내고 있다
. GSFC 전자파 요구사항과 시험방법에
대해서 미군사규격
MIL-STD-461F와의 관계를 포
함하고 있다
.
Test Description
MIL-STD-461F
Designator
GEVS Tailoring
Limit(s)
Test Method
Conducted Emissions, Power Leads, 30 Hz to 150 kHz
CE101
tailored
DM
Conducted Emissions, Power Leads, 150 kHz to 50 MHz
CE102
tailored
CE03* (DM)
Conducted Emissions, Common Mode, Power and Signal Lines
no equivalent
new
new
Conducted Emissions, Turn-on Transients
no equivalent
new
new
Conducted Emissions, Antenna Terminal
CE106
tailored
no change
Conducted Susceptibility, Power Leads
CS101
tailored
alternate method available
Conducted Susceptibility, Antenna Port, Intermodulation
CS103
tailored
no change
Conducted Susceptibility, Antenna Port, Rejection of Undesired Signals
CS104
tailored
no change
Conducted Susceptibility, Antenna Port, Cross-Modulation
CS105
not applied
not applied
Conducted Susceptibility, Transients, Power Leads
CS106
CS06*
CS06*
Conducted Susceptibility, Structure Current
CS109
not applied
not applied
Conducted Susceptibility, Bulk Cable Injection, 10 kHz to 200 MHz
CS114
tailored
no change
Conducted Susceptibility, Bulk Cable Injection, Impulse Excitation
CS115
tailored
no change
Conducted Susceptibility, Damped Sinusoidal Transients
CS116
not applied
not applied
Radiated Emissions, Magnetic Field
RE101
tailored alternate method available(RE04*)
Radiated Emissions, Electric Field
RE102
tailored
alternate methods available
Radiated Emissions, Antenna Spurious and Harmonic Outputs
RE103
not applied
not applied
Radiated Susceptibility, Magnetic Field
RS101
tailored
no change
Radiated Susceptibility, Electric Field
RS103
tailored
no change
Radiated Susceptibility, Transient Electromagnetic Field
RS105
not applied
not applied
* MIL-STD-462 Test Method
표
1. 미군사규격과 GSFC 전자파규격 요약

김태윤 외 / 항공우주산업기술동향 14/2 (2016) pp. 124~131
131
3. 결 론
1965년에 처음 제정된 미군사규격 MIL-STD-461
은 군 시스템
, 항공기 시스템 및 우주시스템 전 분
야에서 광범위하게 적용되고 있으나
, 규격에 대한
기준이 실제 환경과는 많은 차이를 보이고 있다
.
이를 극복하기 위해
2013년에 개정한 미국 항공
우주국 고다드 우주센터
(NASA GSFC)의 전자파규
격은 현재 개발하고 있는 많은 위성플랫폼이 직면
하는 전자파문제를 효과적으로 통제할 수 있을 것
이며
, 이는 위성개발 기간과 비용에 실질적인 도움
을 가져올 수 있을 것으로 기대한다
. 한국항공우주
연구원에서 개발하고 있는 위성플랫폼 역시 미군
사규격을 기준으로 수립되어 있으나 다목적실용위
성
1호부터 5호에 이르기까지 6개의 위성프로그램
을 개발하면서 축적된 기술을 바탕으로 현재 개정
된
GSFC 규격과 유사한 내용으로 전자파 규격 및
측정이 이루어지고 있다
. 하지만 우리가 개발하고
있는 위성플랫폼의 실제 운영환경을 고려한 전자
파규격의 수립과 전자파요구사항에 대한 정확한
측정방법에 대한 체계적인 연구를 통해 더 실질적
이고 효율적인 전자파규격의 수립이 필요할 것으
로 생각된다
.
참고문헌
1. GSFC-STD-7000A, “General Environmental
Verification Standard(GEVS),” April 2013
2. MIL-STD-461C, “Electromagnetic Emission and
Susceptibility Requirements for the Control of
Electromagnetic Interference,” 4 August 1986
3. MIL-STD-462, Notice 2, “Electromagnetic
Interference Characteristics, Measurement of,”
1 May 19
4. MIL-STD-461F, “Requirements for the Control
of Electromagnetic Interference Characteristics
of Subsystems and Equipment,” 10 December
2007
5. SL-E-0002, Book 3, “Space Shuttle
Specification, Electromagnetic Interference
Characteristics, Requirements for Equipment,”
10 August 2001
6. AIAA S-121-2009, “Electromagnetic
Compatibility Requirements for Space
Equipment and Systems”
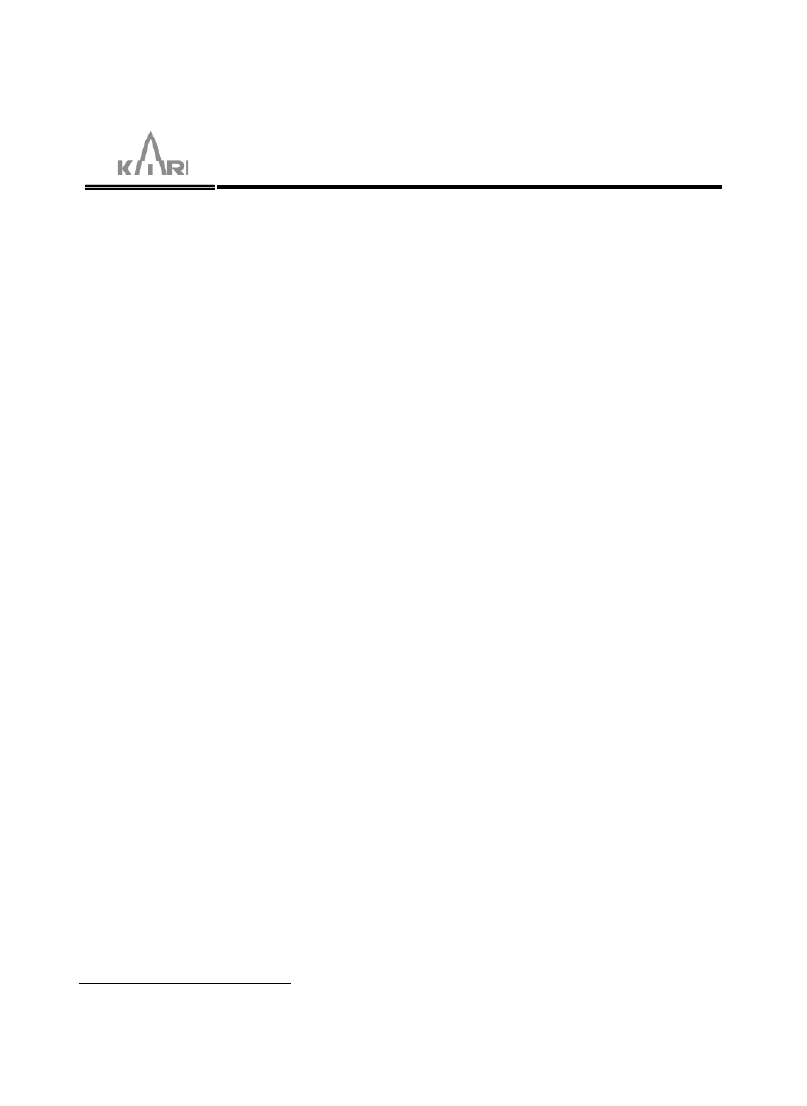
항공우주산업기술동향 14권 2호 (2016) pp. 132~137
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
500Kg급 중형위성 표준본체 전기시스템 설계개념
박종오*
1 )
, 전현진*, 나성웅**
Electrical System Design Concept of Standard
Platform for 500kg medium-sized Satellite
Park, Jong-Oh*, Jeon, Hyeon-Jin*J, Ra, Seong-Woong*
ABSTRACT
Korea Aerospace Research Institute (KARI) is now developing the 500kg medium-sized
Satellite for acquisition of high resolution images of the Korean peninsula to meet the public
requirements such as national territory management, agriculture and forestry management,
disaster monitoring, etc. This satellite will have the standard platform to accommodate the
various payloads system in the future. The standard platform means the reproducible
platform without any change in the design as well as configuration predefined to save the
development cost and schedule. In this paper, the electric system design concept of standard
platform for 500kg medium-sized satellite is introduced.
초 록
한국항공우주연구원은 국토 자원관리
, 재난재해 대응 관련 공공부분 수요 대응과 국가 공간정
보 활용 서비스 제공을 위한
500kg 급 고해상도 증형위성을 개발하고 있다. 이 위성은 차후 다
양한 탑재체의 요구조건을 만족하는 표준 플랫폼 개발을 목표로 하고 있다
. 표준플랫폼이란 개
발비용과 기간을 획기적으로 단축할 수 있도록 기본구성의 설계 변경 없이 복제 가능한 플랫폼
또는 최소한의 변경만으로 활용 가능한 플랫폼을 의미한다
. 본 논문에서는 500kg급 중형위성을
위한 표준 플랫폼의 전기 시스템 설계 개념을 소개하고자 한다
.
Key Words : 고해상도(High Resolution Image), 중형위성(Medium-sized Satellite), 표준 플랫폼
(Standard Platform), 전기시스템 설계(Electrical System Design), 탑재체
(Payload)
* 박종오, 전현진, 한국항공우주연구원, 위성연구본부 차세대중형위성체계팀, jopark@kari.re.kr, hj eon@kari.re.kr
** 나성웅, 충남대학교, 공과대학 전자공학과, swra@cnu.ac.kr
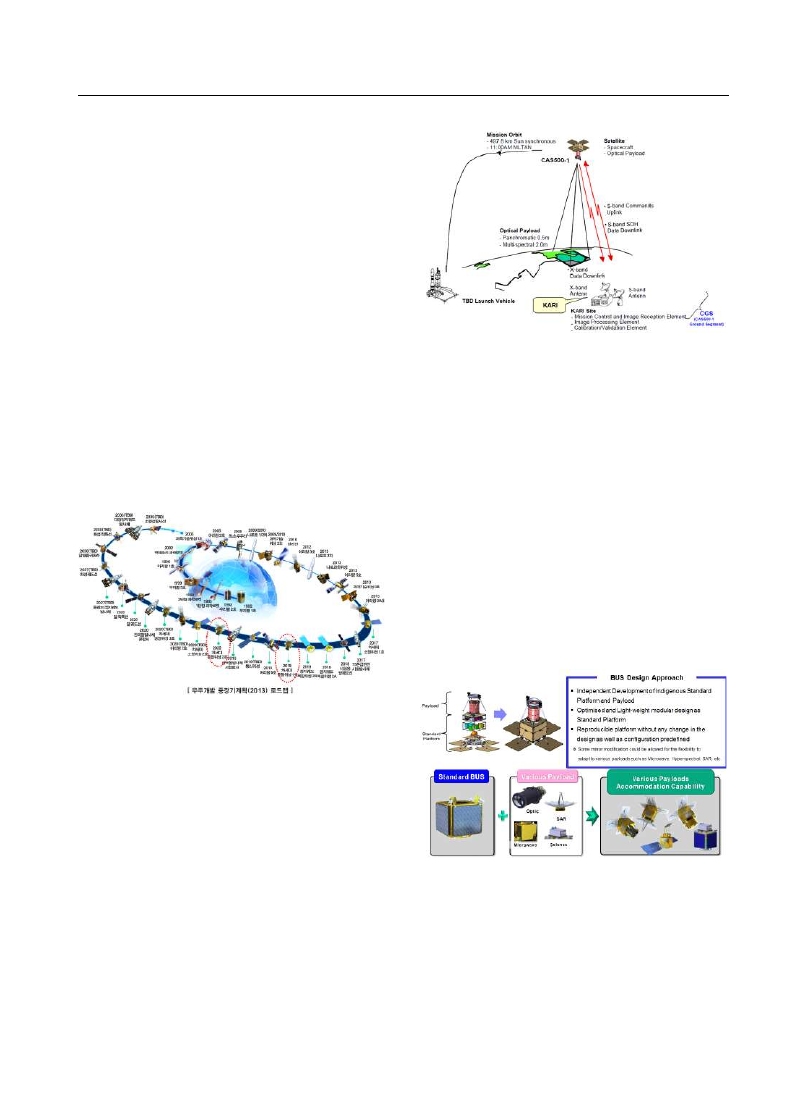
박종오 외 / 항공우주산업기술동향 14/2 (2016) pp. 132~137
133
1. 서 론
2013년 확정된 국가 우주개발 중장기 계획에
의하면
<그림 1>과 같이 다목적실용위성, 정지궤
도복합위성
, 차세대소형위성의 개발과 함께 국토
자원관리
, 재해재난 대응 관련 공공부문 수요의
대응과 국가공간정보 활용 서비스 제공을 위한 목
적으로 정밀 지상관측용 중형위성 개발이 진행되
고 있다
.
차세대중형위성은 표준 플랫폼을 개발하여 개발
기간과 비용을 획기적으로 단축하고
, 향후 국내 위
성 수요에 효과적으로 대응하며
, 국내 산업체 주도
로 위성을 개발하여 위성 분야 산업체 육성 및 수
출을 도모할 목적을 가지고 있다
. 더불어, 본체 핵
심부품 및 탑재체의 국내 독자개발로 위성 기술의
완전 자립화도 도모하고 있다
[1].
그림
1. 국가우주개발중장기계획(2013)
차세대중형위성은
<그림 2>와 같이 위성체, 발
사체 그리고 지상국으로 구성될 예정으로
, 위성체
는
497km 태양동기궤도에서 0.5m의 공간해상도의
전자광학탑재체를 장착하는 정밀 지상 관측위성이
다
. 시스템의 주요 요구사항으로 임무수명은 4년,
관측영역은
800km x 1,000km 범위의 한반도, 관
측폭은
12km 이상, 관측모드는 스트립 영상
(Stereo Image), 스팟 영상(Spot Image) 그리고 다
중패스
스테레오
영상
(Multi-pass
Stereo
Imaging)을 지원할 수 있으며, 하루 최대 25분 촬
영이 가능해야 한다
.
본 논문에서는 차세대중형위성 시스템 구조
, 임
무 요구조건 및 개발 품목에 대해 논하였다
. 2장에
서는 표준 플랫폼의 개념에 대해 설명하였고
, 3장
에서는 전기시스템의 설계 개념을 제안 하였다
. 마
지막으로
, 4장에서는 결론을 제안하였다.
2. 표준 플랫폼 설계 개념
표준플랫폼이란 다양한 탑재체의 요구조건을 만
족하는 플랫폼으로
, 개발비용과 기간을 획기적으로
단축할 수 있도록
<그림 3>과 같이 기본구성의 설
계 변경 없이 복제 가능한 플랫폼 또는 최소한의
변경만으로 활용 가능한 플랫폼을 의미한다
[2].
그림
3. 표준플랫폼 설계 개념
개발된 표준 플랫폼은
<그림 4>와 같이 차후
500Kg 급 위성에서 탑재 가능한 탑재체 즉, 전자
광학
(Electro-Optic)
탑재체
,
합성개구면레이터
(Synthetic Aperture Radar) 탑재체, 초분광
(Hyper-Spectral) 탑재체 등을 탑재모듈에 장착하
그림
2. 시스템 구조
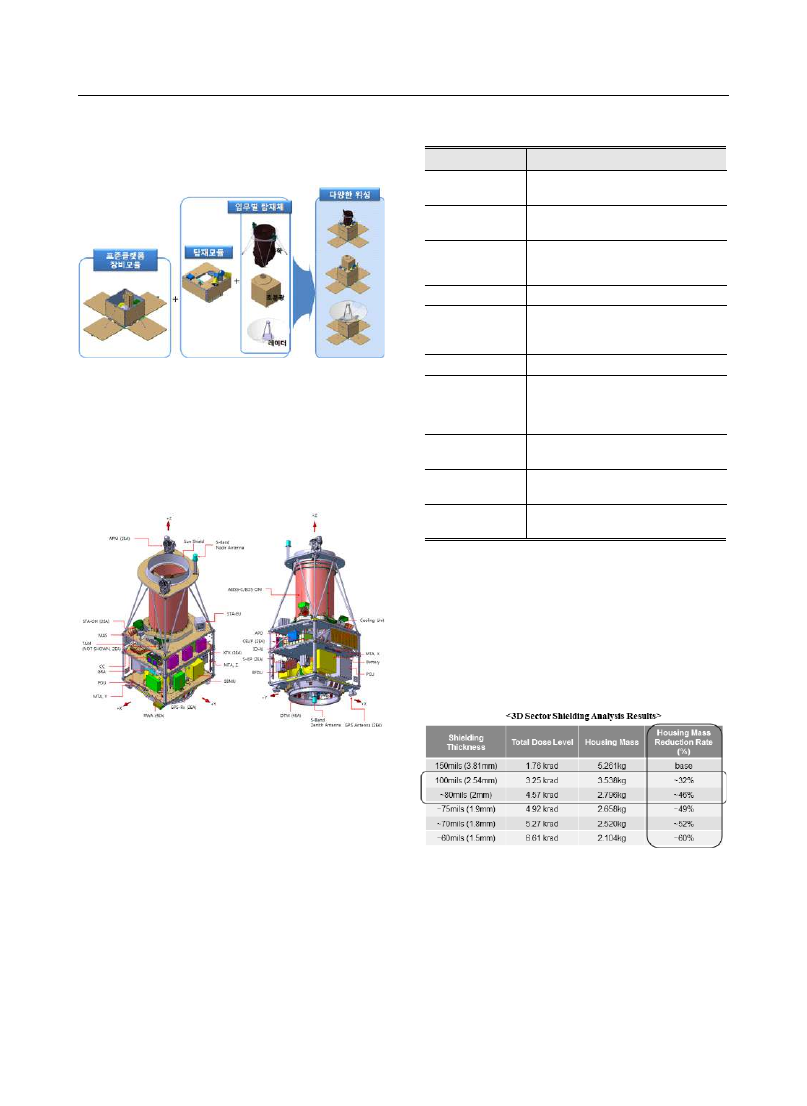
134
박종오 외 / 항공우주산업기술동향 14/2 (2016) pp. 132~137
고 표준 플랫폼과 결합하여 위성을 개발하도록 지
원하는 개념이다
.
그림
4. 탑재체 임무별 중형위성 개발 개념
표준 플랫폼 개념을 적용한 차세대중형위성
1호
와
2호는 0.5m급 공간해상도의 전자광학탑재체를
장착한 동일한
2개의 위성으로 기계적 형상을 <그
림
5>에서 보여주고 있다.
그림
5. 차세대중형위성 1/2호 기계 형상도
3. 전기시스템 설계 개념
3.1 전기시스템 설계 조건
표준 플랫폼의 전기시스템 설계를 위한 기본설
계조건으로 무게 감소를 위한 경량화
(Compact),
확장성을 고려한 모듈화
(Modularity)를 고려하여
Trade-off study를 수행하였고 그 결과는 <표 1>
과 같다
[1-3].
Items
Result
주전원 전압
설계
이중 주전원 :
Unreg. 50V & Reg. 28V
배터리 용량
설계
1-day energy balance :
50 Ahr @ BOL
표준 탑재컴퓨터
설계
LEO & GEO On Board
Computer
SW based Reconfiguration Unit
전력 모듈러 설계
PCU & PDU
S-band 다운링크
통신속도 향상
설계
4096 bps (Low rate) &
1.6666 Mbps (High rate)
메모리 효율 설계
CMD Frame Size 84 bytes
전력 버짓 효율
설계
Worst case analysis
(S/A: 1-string failure,
Battery : 1-string failure @
EOL)
파워 채널 효율
설계
Block-style Thermal Control
적용
신호 채널 설계
MIL-STD-1553B, CAN,
UART(EGSE)
확장성을 고려한
통신라인 설계
SBMU-PCU/PDU/VDE CAN Bus
적용
표
1. Trade-Of f Study 분석 결과
이외에도 전장박스의 경량화를 위한 방사선 환
경 분석을 수행하였으며
<표 2>와 같이 Shielding
Guideline을 기존 150 mils (3.81mm)에서 최대
80mils (~2mm)까지 감소시킬수 있었으며 기존 대
비 최대
46%의 하우징 무게 절감이 기대된다.
표
2. 전장박스 Shielding Guideline
더불어 지구관측의 기본 임무수행을 위한 전기
시스템의 기본적인 전력
, 통신, 신뢰성, 환경시험
등 주요 요구조건은 아래와 같다
.
• 전기시스템 전력 요구조건
- Primary Power Source :

박종오 외 / 항공우주산업기술동향 14/2 (2016) pp. 132~137
135
・태양전지판은 임무수명
4년후 임무종료
시에 평균
1,100Watt를 생성해야 함
- Primary Power :
・
Unregulated Power : 36 ~ 49.2V [TBR]
・
Regulated Power : 28 ± 0.5V
- Primary Power Grounding :
・주전원의 접지는
single point ground
(SPG)로서 위성체 버스에 접지되어야 함
- Secondary Power :
.보조전원은 전장박스 내부에서 정류함
- Secondary Power Grounding :
・보조전원의 접지는 각 전장박스의 하우징
에서 버스에 접지되어야 함
- Energy Balance 해석은 1-day를 기준
• 전기시스템 통신 요구조건
- Data Acquisition, Processing, and Storage :
・위성의 상태정보
(SOH)를 저장하도록 BOL
에서 최소
2Gbits의 저장해야함
・위성은 매일 최소
2Gbits의 저장정보를 지
상국에 전송해야 함
- GPS Timing Function
・위성은 프로세서와
AEISS-C의 동기화를
위한
GPS를 이용한 1 pps 신호를 제공함
- Communication with Ground Station
・
S-Band link margin : Min. 3dB margin
・
Command : CCSDS format, 4000 bps
・
Telemetry : CSDS format,
4096 bps for real time,
1.6666 Mbps for playback
・
BER for Uplink ≤ 10-6,
BER for Downlink ≤ 10-5
・
Ranging Capability
• 전기시스템 신뢰성 요구조건
- Components Mission Life : 발사후 4년
- Single Point Failure Avoidance :
・
Single point failure를 최소화하도록 설계함
・
Single point failure가 위성을 잃어버리거나
주요한 성능 감쇄가 없도록 견뎌야 함
- Fault Detection, Isolation and Recovery
・위성은 어느 전장박스로부터 발생한
failure가 다른 전장박스의 failure를 야기
하지 않도록 설계함
・모든 주전원의 분배회로는 전원 버스를
보호하기 위해 전류제한
(LCL) 제공해야 함
・위성은
Fault를 감지하고, 격리하며 회복
을 위한 테스트 포인트와 텔리메트리를
제공해야 함
・궤도상에서 위성의 자동 스위칭 기능을
지상국 명령으로 기각할 기능을 제공해야 함
・궤도상에서
SBMU의 RAM 영역의 탑재소
프트웨어를 수정할 기능이 있어야 함
・궤도상에서 영구적인 저장 영역의 프로그
램을 재제작할 기능이 있어야 함
・위성은 명령을 저장하고 메모리의 정보를
덤프할 기능이 있어야 함
- Autonomous Survival Period
・위성은 지상국 없이 최소
30일 동안 열적
및 전력적으로 안전하게 자동 생존해야 함
-
Normal
Operation
Without
Uplink
Commands
・위성은 지상국의 상향 명령없이 최대
48
시간동안 정상 임무를 수행해야 함
• 전기시스템 환경시험 요구조건
- Electromagnetic Compatibility :
・위성체를 구성하는 모든 자재 및 부품은
EMC Control Plan and Requirements 요
구사항을 만족하도록 설계함
- Spacecraft Components Design and Test
Environments :
・모든 위성체의 전장 부품은
Component
Environmental Design and Test Spec. 과
EMC Requirements Spec.에서 규정한 환
경조건을 만족하도록 설계함
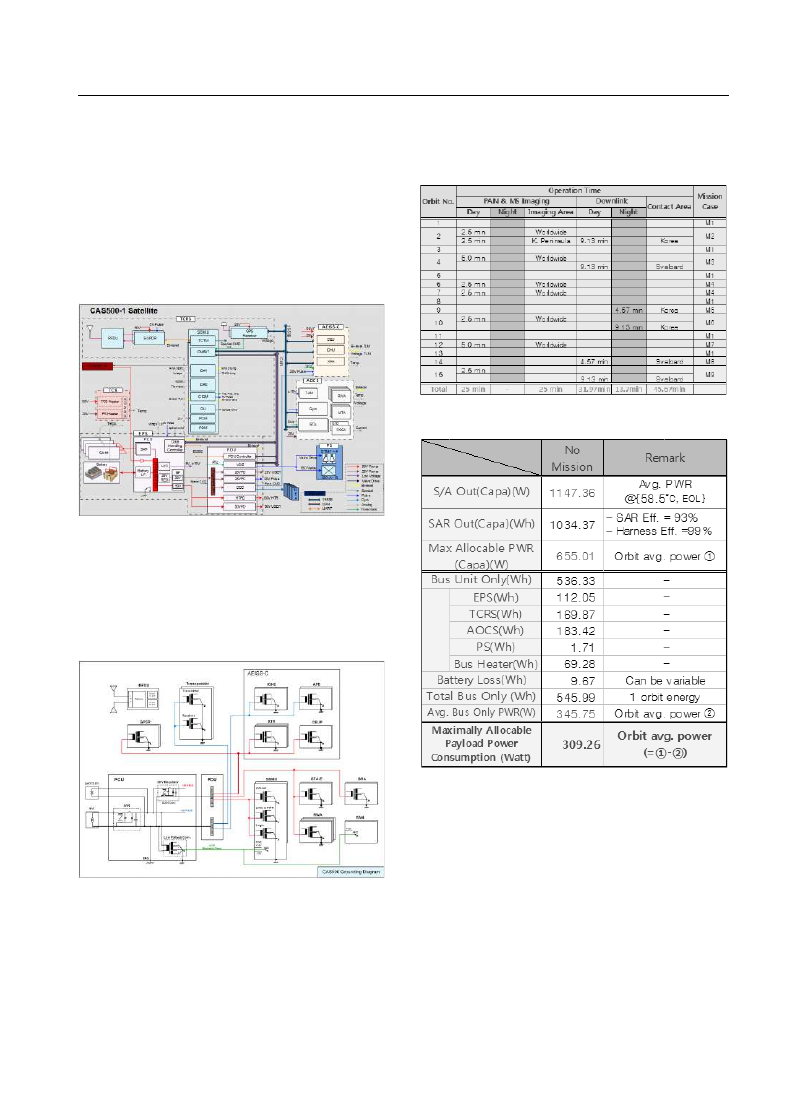
136
박종오 외 / 항공우주산업기술동향 14/2 (2016) pp. 132~137
3.2 전기시스템 설계
3.1절에 제시한 설계 요구조건과 표준 요구조건
과 더불어 기존위성 개발과정에서 취득한 개발경
험을 토대로 체득한
Single, Double Fault Failure
방지를 위한 설계도 적용한 전기시스템의 기본 구
성도는
<그림 6>과 같다.
그림
6. 중형위성 전기시스템 구성도
Grounding 설계 개념은 <그림 7>과 같이 기존
위성과 같이
DPSG(Distributed Single Point
Ground) 개념을 적용하였다.
그림
7. 중형위성 Grounding 구성도
전력버짓의 효율적인 설계를 위한 에너지밸런스
해석에 필요한 입력값으로 탑재체 임무모드
, 1-day
위성 운영 시나리오
(<표 3>)와 태양전지판과 배터
리의
1-string failure @ EOL 조건을 적용하였다
[2,3].
표
3. 위성체 1-day 임무운영 시나리오
표
4. 탑재체 제공 가능 전력 용량
전력버짓 해석 결과를 토대로 중형위성 표준플
랫폼은
<표 4>과 같이 궤도 평균 생산전력 655W
중 탑재체에
309W의 전력을 제공하도록 설계되었
다
. 단, 탑재체 제공 가능 전력에는 임무 운영에
따른 위성체 기동에 의해 태양전지판 전력생성 제
한 값이 포함되어 있다
. 더불어 탑재체에 제공 가
능한 전력 채널과 신호 채널의 용량도
<표 5>,
<표 6>에 제시하였다.
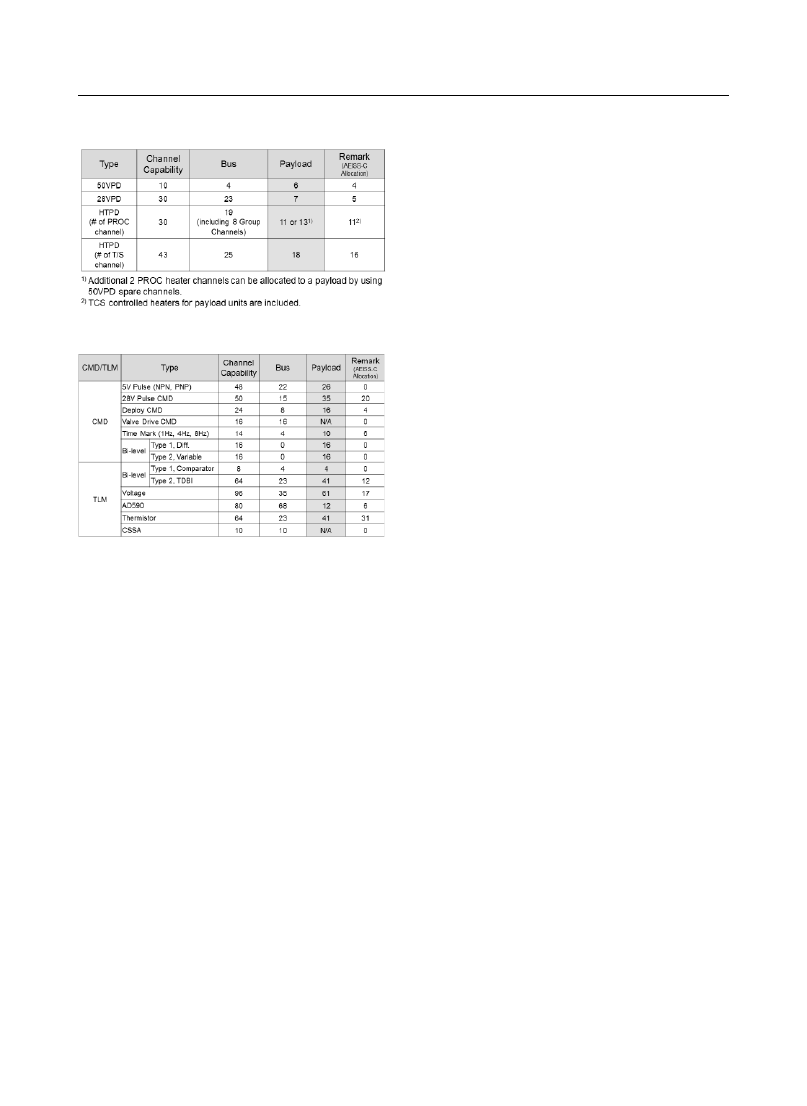
박종오 외 / 항공우주산업기술동향 14/2 (2016) pp. 132~137
137
표
5. 탑재체 제공 가능 전력채널 용량
표
6. 탑재체 제공 가능 신호채널 용량
4. 결 론
본 논문에서는 다양한 탑재체를 수용할 수 있는
500kg급 중형위성의 표준플랫폼 설계 개념과 설계
조건을 검토하였고
, 무게 경량화를 위한 여러 설계
기술을 적용하여 차후 개발될 중형위성의 탑재체
에 제공 가능한 전력
, 전력채널 및 신호채널의 용
량을 제시하였다
.
참고문헌
1. 박종오, 전현진, 김경수, 배진곤 “Power Bus
Design of Standard Platform for 500kg Satellite”,
한국우주과학회지
, 제25권, 제2호, 2016, pp.57.
2. 전현진, 박종오, 한동인 “A Study on Required
Minimum Solar Array Capacity Determination”,
한국우주과학회지
, 제 25권, 제2호, 2016, pp.64.
3. 전현진, 박종오, 한동인 “인공위성 배터리의
최적용량 선정에 대한 연구
”, 한국우주과학회지,
제
25권, 제1호, 2016, pp.58.
항공우주산업기술동향 14권 2호 (2016) pp. 138~149
http://library.kari.re.kr
에서 보실 수 있습니다.
기술동향
저고도 무인기 교통관리 시스템 해외 기술 동향
권지현*
1 )
, 홍성권*, 은연주*, 전대근*
Research and Development Trend of Unmanned
Aircraft System Traffic Management System
Kwon, Jihyeon*, Hong, Sungkweon*, Eun, Yeonju*, Jeon, Daekeun*
ABSTRACT
With the growth of the various fields utilizing drones and the optimistic prospect of their
economic effects, rapid development of the drone markets is expected. However, many problems
such as security and privacy problems have been issued due to lack of traffic management for
drone operations. In this paper, we surveyed the concept of operations for UTM (Unmanned
Aircraft System Traffic Management) proposed by NASA and EASA for the secure and effective
operations of drones in the low altitude airspace. The survey results will be used for the
references to build Korean UTM system, which is a core infrastructure for the safe and efficient
operations of drones in Korea.
초 록
드론을 활용한 다양한 산업분야의 성장과 낙관적인 경제 효과가 전망됨에 따라 앞으로도 급격
한 드론 시장의 발전이 예상된다
. 하지만, 드론 운용을 위한 교통관리 체계 미흡으로 안전, 사생
활 침해 등의 문제가 대두되고 있다
. 본 논문에서는 저고도 공역에서 안전하고 효율적인 무인기
운용을 위해 수립되고 있는
UTM (Unmanned Aircraft System Traffic Management) 운용개념과
발전 로드맵을 해외 사례를 통해 파악해 보았다
. 이를 통해, 우리나라 또한 실정에 맞는 저고도
무인기 교통관리 체계를 구축하여 드론의 적극적 활용을 기대해본다
.
Key Words : Drone (드론), Unmanned Aircraft System (무인기), Traffic Management (교통관리), Low
Altitude (저고도), Concept of Operations (운용개념)
* 권지현, 홍성권, 은연주, 전대근, 한국항공우주연구원, 위성항법·응용기술센터 차세대항행팀
calc100@kari.re.kr, hsk5050@kari.re.kr, yjeun@kari.re.kr, bigroot@kari.re.kr
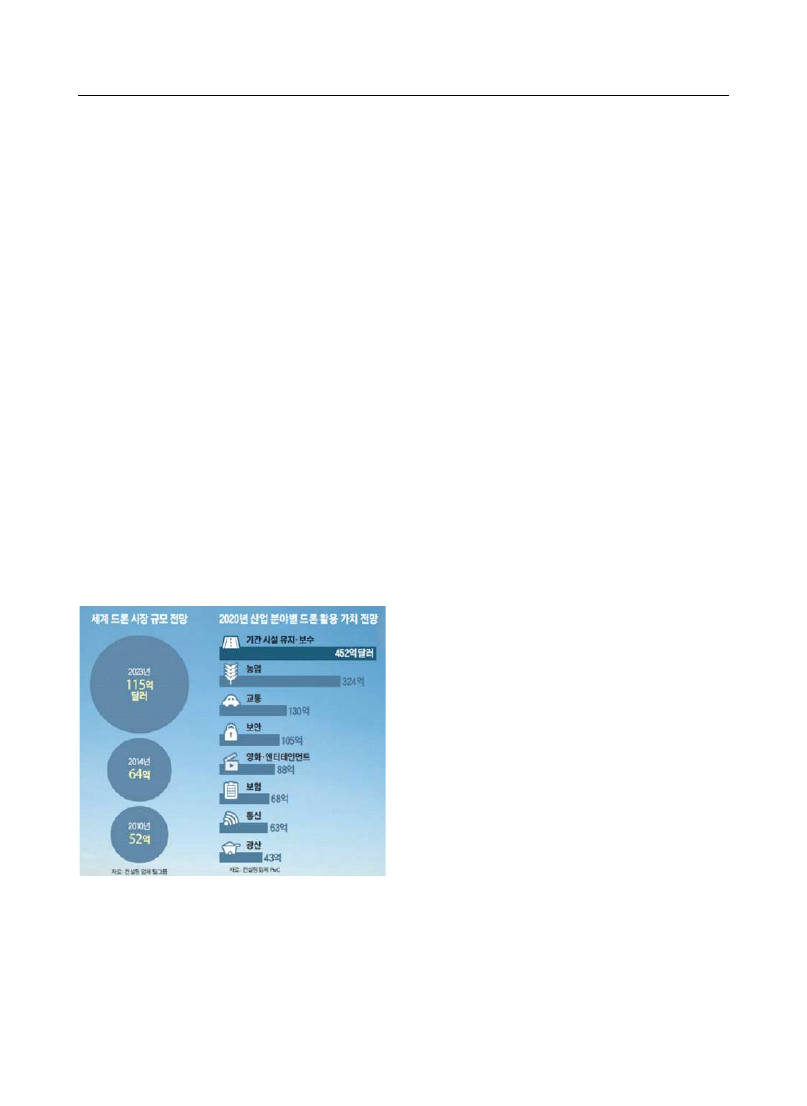
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
139
1. 서 론
미국의 방산업 전문 컨설팅 업체인
<그림 1>의
틸그룹
(Teal Group) 분석에 따르면, 최근 세계 드
론 시장의 규모가 점차 확대되고 있고
, 2023년경에
는 약
13조원의 규모를 가질 것으로 예측하였다
[1]. 또한, 드론의 군용 목적 뿐 아니라 민수시장에
서의 다양한 활용 가치를 전망하였다
. 현재
Google (社)의 project wings, Amazon (社)의
prime air, Flirtey (社)의 UAS 7-Eleven은 모두 드
론을 활용한 배송 서비스를 준비하고 있고
, 에어드
로이드
, DJI (社)는 고해상도 촬영 장비를 드론에
탑재하여 사용자가 원하는 지역의 환경을 촬영하
고 이를 이용할 수 있는 서비스를 제공하고 있다
.
이처럼
, 드론의 상업적 활용(배송, 농업 및 축산,
촬영 등
) 과 공공목적의 활용(교통상황 및 기상 모
니터링
, 구조 등) 범위가 다양하고 이를 통한 수익
창출과 경제적 효과를 기대할 수 있으므로
, 드론
활용 범위와 수요가 지속적으로 증가할 것으로 예
상된다
.
그림
1. 세계 드론 시장 추이와 활용 가치 전망[1]
하지만 드론 운영에 대한 교통관리 체계가 완전
히 수립되지 않아
, 드론의 불안정한 기체성능과 주
파수 혼란 등으로 인한 조종 실패로 인명
, 재산 피
해가 발생하였고
, 사생활 침해 등의 문제가 대두되
었다
.
드론이 실생활에 활용되기 위해서는 기술적
, 환
경적 문제와 보안과 관련된 다양한 문제들이 해결
되어야 한다
. 기술적 문제로는 드론이 다른 유인·
무인 항공기나 지상의 사람
, 시설에 위험을 미치지
않을 정적
/동적 Geo-fencing, 각 드론에 대한 추적
및 감시
, 충돌 회피 등의 문제가 다루어져야 하며,
환경 문제로는 소음 및 대기 오염과 관련된 기준
이 설정되어야 한다
. 또한 드론 운영의 횟수와 범
위의 증가에 따라 대두되고 있는 사생활 침해나
사이버 보안 문제 또한 해결되어야 할 것이다
. 이
러한 다양한 문제들에 대한 소극적인 방안으로
, 전
세계적으로 드론에 대한 규제들이 마련되고 있다
.
최근 우리나라에서도 드론 운행에 대한 일부 법이
제정되었으며
[2], 이는 드론 운용에 대한 신고 기
준과 제한 범위 및 금지된 활용 범위 등을 포함하
고 있다
. DOT(미교통부)와 FAA(미연방항공국)은
상업용 드론 운용 기준을 제시하였으며
[3], 2016년
8월부터 해당 법을 발효하였다. 여기에는 운행 제
한에 대한 기준 뿐 아니라 원격 조종사의 자격 및
책임
, 비행체 요건 및 제한되지 않는 모형 항공기
의 기준 등을 제시하고 있다
.
하지만
, 다양한 분야에 드론이 적극 활용되기
위해서는 이러한 제한적인 운행 규정보다 안전하
고 효율적인 드론 운영이 가능하도록 지원해주는
별도의 교통관리 체계가 필요하며
, 이러한 수요에
따라 전 세계적으로 저고도 무인기 교통관리 체계
가 관심을 받고 있다
. 현재 미국에서는 NASA(미
항공우주국
)와 FAA가 저고도 무인항공기 교통관
리 체계인
UTM (UAS Traffic Management)에 대
한 기본 개념을 제안하고 상세한
UTM 운용개념
수립 및 필요기술에 대한 기초연구를 수행하고 있
으며
, 유럽 또한 이와 유사한 다양한 연구를 계획
하고 있다
.
본 논문에서는 현재 제안된 운용 개념과 관련
로드맵 중심으로 해외 동향을 살펴보았다
. 즉, 현
재
NASA에서 제안되고 있는 UTM 운용 개념 및
시스템 구성과 프로토타입에 대하여 상세히 살펴
보았으며
, 유럽 UTM 시스템을 구성하는데 있어
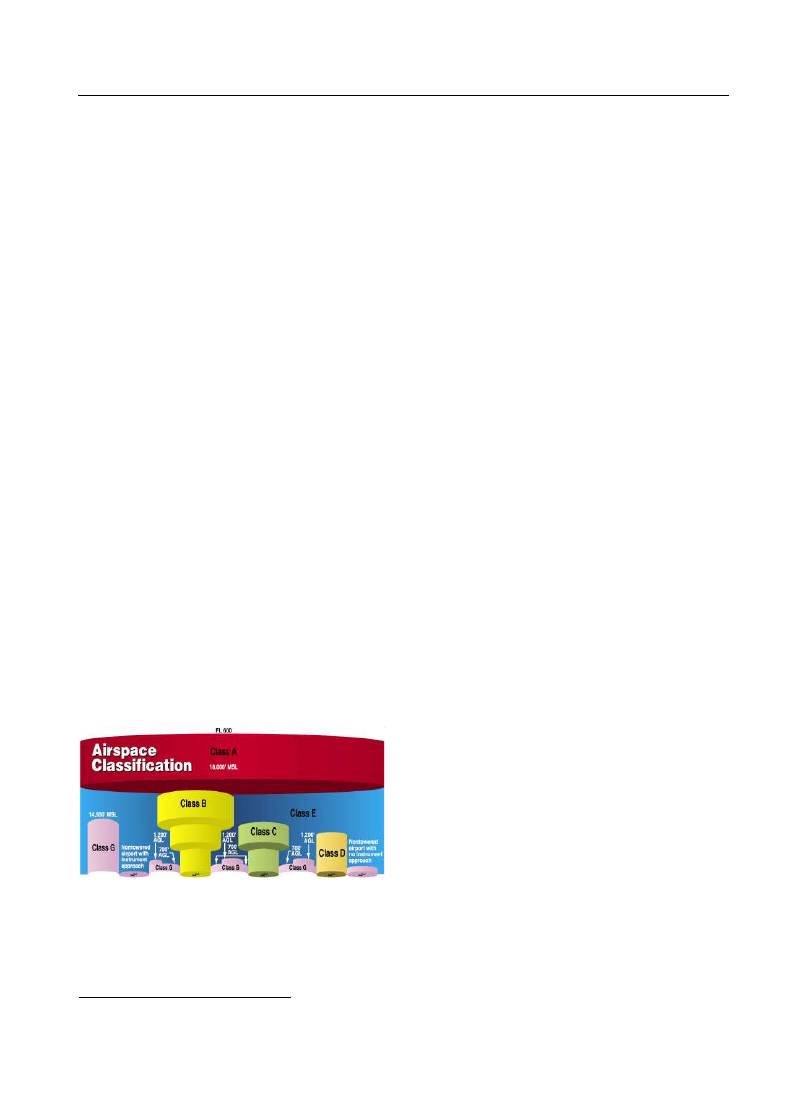
140
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
기본이 될
EASA(유럽항공안전국)의 드론 운영 개
념에 대해 살펴보았다
. 또한 NASA와 SESAR
(Single European Sky ATM Research)에 의해 주
도되고 있는 미국과 유럽의
UTM 기술 개발 로드
맵을 살펴보았다
.
2. 해외 UTM 기술 개발 동향
2.1 미국 NASA-FAA
NASA 및 FAA 주도 하에 저고도 small UAS1)
(Unmanned Aircraft System)에 대한 교통관리, 즉
UTM에 대한 운용개념이 제안되었다. 2015년 7월
NASA는 AUVSI (Association for Unmanned
Vehicle Systems International)와 함께 제 1회
UTM convention 2015를 개최, 여러 기관과 학교
대표들을 초청하여
UTM 도전과제에 대해 논의하
였고
, 정치적 이슈, 사생활, 안전, 보안 문제, 시장
증가
, 저고도 교통 관리를 위한 전략, 국제적 전망
에 대해 다루었다
[4].
2.1.1 UTM 운용개념
ATM(Air Traffic Management)를 위한 공역은
<그림 2>와 같이 크게 관제공역(Class A, B, C, D,
E)과 비관제공역(Class G)으로 구분된다.
그림
2. 공역의 분류[5]
이에 따라
, 다음과 같이 UAS 운용 방침을 나누
어 볼 수 있다
[6].
1) sUAS : 55lb(25kg) 이하의 UAS를 일컬음.
(1) 비관제 공역(class G)에서의 UAS 운용
(2) 관제 공역이지만, controlled air traffic과는 분
리된
UAS 운용
(3) Controlled air traffic flows에서의 UAS 운용
NASA가 제시한 초기 UTM 운용개념[6]은‘비관
제 공역
(class G)에서의 UAS 운용’에 해당되며 추
후
‘관제 공역이지만, controlled air traffic과는 분리
된
UAS 운용’ 으로의 확장 또한 고려하고 있다.
‘controlled air traffic flows에서의 UAS’는 기존 비
행 관제 절차를 정확히 따를 것을 요구하면서
, 이
에 따른 기체 성능을 갖출 것을 요구하였다
. Class
G공역에서 55lb(25kg) 이하의 sUAS 운용개념을
수립하기 위해 먼저 다음과 같이 유인기와의 차이
점을 살펴볼 수 있다
[6].
w 다른 비행체를 감지하고
, 비행체를 직접 제어
하는
on-board 조종사가 없음
w
sUAS는 다양한 기체 성능을 가질 수 있음
w
sUAS에 무거운 장비를 탑재하기 어려움
w
sUAS의 분리간격은 기존 ATM 분리간격과 상
이함
w 시장 추세로 보아
sUAS의 수가 기존 항공기
수보다 현격히 증가할 것임
이와 같은 차이로
sUAS가 유인기에 적용되는
항공교통법을 그대로 준수하기 어렵다
. 때문에 드
론 운용의 지리적
, 운용 목적, 교통 혼잡도를 고려
한 위험도에 따라 구분될 수 있는 운용 단계를 먼
저 정의하고 단계별 필요기술을 개발하는 방식을
고려하였다
[6]. 예를 들어, 시골 지역 운용부터 건
물들이 높고 밀집된 도심지역에서의 운용
, 원거리
감시 업무부터 배송과 같은 초근접 업무
, 가시권
내 조종에서부터 가시권 밖 자율 비행
, 단일 비행
에서부터 유인기와 무인기가 동시에 운용되고 있
는 혼잡한 환경으로 위험도를 높여가며
sUAS가
안전하게 운용되도록 운용개념을 세우고자 하였다
.
또한
, <표 1>, <표 2>와 같은 guiding 규칙과
operating 규칙을 제시하였다[6].
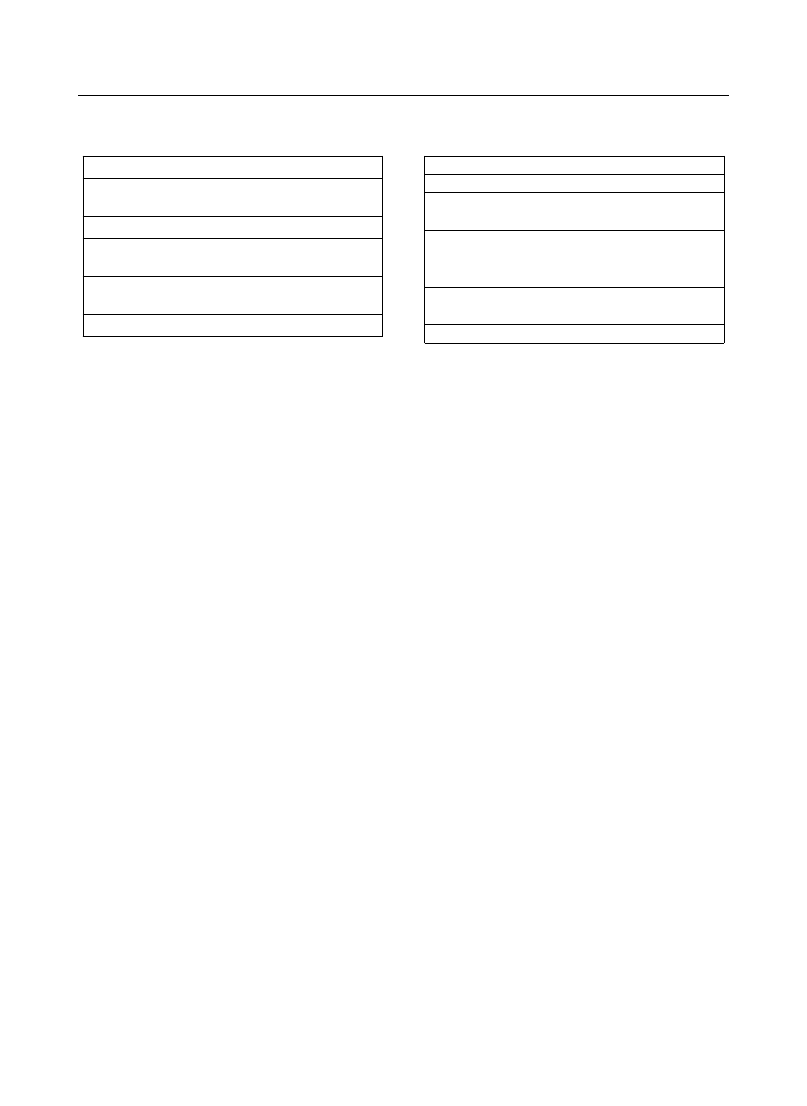
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
141
w G공역에서 가시권 밖 비행이 가능하여야 함
w G공역에서 운행 중인 드론의 적절한 투명성이
제공되어야 함
w 다양한 기체 성능의 운용이 가능하여야 함
w 사용자의 요구에 따라 한 대 혹은 여러 대의 운
용이 가능하여야 함
w 드론 간 정보 공유를 통해 기존과 다른 감시 기
술이 도입되어야 함
w 새로운 유형의 미션이 가능하여야 함
표
1. UTM Guiding 규칙
<표 1>에 기술된 항목들에 대한 부가적인 설
명은 다음과 같다
. 드론의 적절한 투명성 제공은
민감한 개인 정보를 제외하고 누가
, 어떤 목적으
로 드론을 이용하는 것인지에 해당하는 정보를
공개하는 것으로
, 사생활 문제, 안전 문제, 운용
자의 책임 문제를 고려할 수 있는 매우 중요한
요소이다
. 다양한 기체 성능의 운용이 가능하여
야 한다는 것은 드론은 기체 형상
, 날개 수,
hovering, 엔진 타입, 사용하는 센서에 따라 기체
의 성능이 다양하게 나타나므로 비행역학을 정확
히 모델링하기 어려움이 있지만
, 안전한 운용을
위해 이러한 모델링이 가능해야 한다는 것을 의
미한다
. 또한 수행하고자 하는 미션에 따라 여러
대의 드론이 협력 운용될 수 있는 상황을 가정할
수 있어야 한다
. 또한 운용중인 sUAS들을 통해
실시간 교통상황
, 날씨, 지형지물 정보를 모두 수
집하고 이를 공유하여 안전하고 효율적인 드론
운용이 가능하도록 할 수 있어야 한다
. 현재 드
론의 성능으로는
1시간 정도 이내로 비행이 가능
하지만 기술 발전에 따라 드론의 장시간 비행이
가능해지고
, 비행 속도 또한 매우 빨라 질 수 있
으므로 새로운 유형의 미션 또한 가능할 수 있음
을 고려해야 한다
.
<표 2>는 operating 규칙에 대한 항목들이다
[6].
w 오직 허가받은 UAS와 사용자만 운행 가능함
w UAS간 분리 간격 유지
w UAS와 헬리콥터, 글라이더 등의 유인기 간 분리
간격 유지
w UAS operator와 시스템은 공역에서 만족되어야
할 모든 조건을 만족해야 하며, 지상의 사람,
동물, 구조물로부터 간격 유지
w Public safety UAS는 다른 UAS와 유인기보다
우선순위가 있음
w 다른 UAS 접근을 막는 행위는 금지되어야 함
표
2. UTM Operating 규칙
2.1.2 시스템 구성
운용개념 정립을 위한
guiding, operating 규칙
들과 여러 이해당사자 간의 역할 및 책임을 고려
하여
NASA는 <그림 3>과 같은 UTM 시스템을
제안하였다
[7]. 현재 아키텍쳐에서 UTM 시스템은
크게
3가지 기능, 즉, ANSP (Air Navigation
Service Provider) 기능, Operator 기능, Other
Stakeholders 기능 요소로 구성된다. ANSP 기능은
NAS (National Airspace System), NAS Data
Sources, 그리고 이들과 연결된 비행정보 관리 시
스템
(공역 정보를 담고 있으며, 무인기 비행요청이
들어올 시 이의 운용 조건들을 파악하고
, 허가를
줌
)으로 구성된다. Operator 기능은 드론과 드론
조종자
(운영자), 외부 데이터 제공자, 그리고 이들
간의 허브 역할을 하는
USS (UAS Service
Suppliers) 요소로 구성된다. Other stakeholders는
공공안전부처
, general public 등과 같은 기타 사용
자 및 이해당사자들을 의미한다
. 이와 같은 UTM
체제에서
ANSP가 수행해야하는 역할은 다음과 같
다
[6].
w
Performance based regulatory environment를
설정
(운용 목적(use case category), 운용 환경
(operational environment), 다른 요소들에 기반
하여 수행 요구조건들을 설정한다
.)
w 공역조건을 정의하고 필요에 따라 갱신
(예를
들어
, 공항 형상이 바뀌거나 특정 공역이 닫히
는 경우 실시간 반영되도록 한다
.)
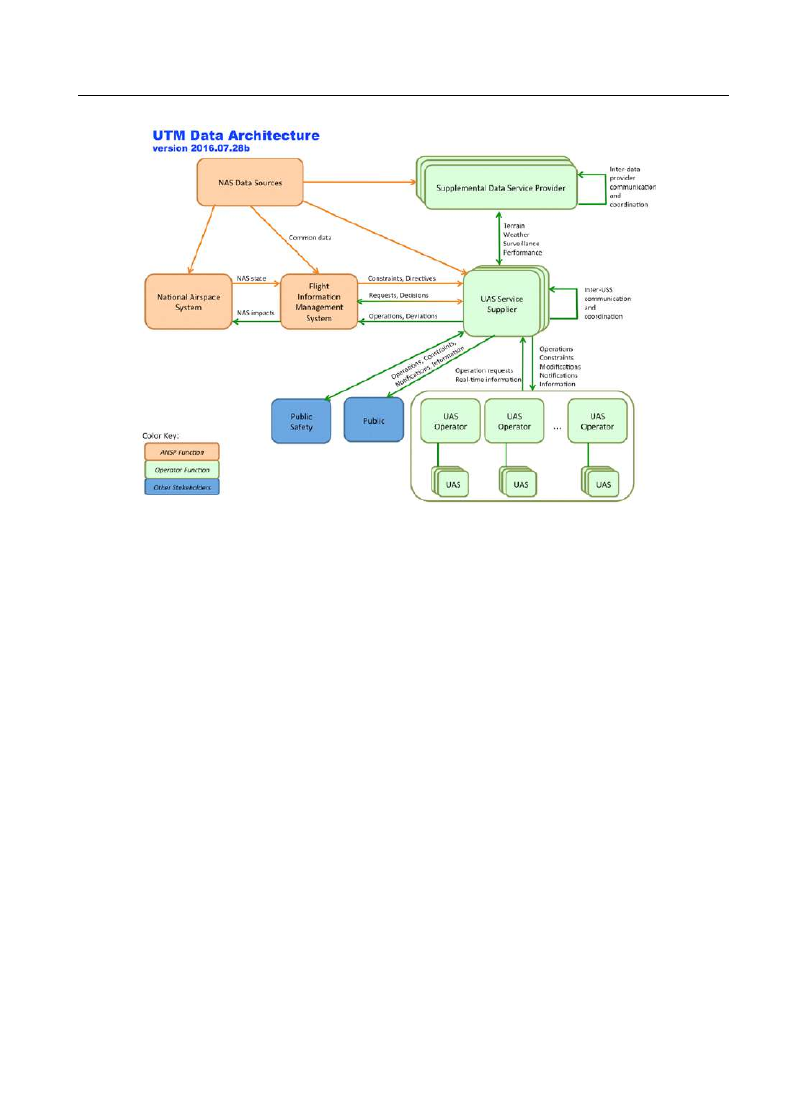
142
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
w
UAS간 데이터 전송 표준 설정
w 여러 이해당사자와 운용자간의 정보 교환 표준
정의
w 공역 수용량 조절을 위한 실시간 공역 관리
w
UAS 운용자와 public에게 알림정보를 줌
w 정적
, 동적 Geo-fencing 설정
w 관제 공역으로의 진입 및 탈출 운용을 관리
Operator가 수행해야 하는 역할은 다음과 같다
[6].
w
UAS 등록
w 조종 자격 획득 및 훈련
w 지형
, 지물 및 타 비행체 충돌 회피
w 사람이나 동물에 상해를 입히지 않도록 함
w 공역조건 준수
w 기상 악화 등 비행이 어려운 상황 회피
w
Performance based regulation 준수
w 비행체
ID (Identification)와 운용 목적 공개
w 비행계획 접근 허용
w
ANSP가 정한 표준에 따라 상태 정보 교환
w 협력적 의사 결정에 참여
w 교통 혼잡상황에 대응
USS는 실운용자와 UTM core(ANSP 기능 중 비
행정보관리 시스템
) 간의 매개체 역할을 한다. 즉,
UAS 운용자로부터 비행계획을 받고, 외부 데이터
제공자로부터 지형
, 날씨, 감시 정보 등을 수집하
며
, 비행정보관리 시스템으로부터 운용을 위한 요
구조건들을 받아 경로
, 충돌 회피 전략, 공역 사용
등을 계획한다
. 이를 다시 ANSP의 비행정보관리
시스템
(Flight Information Management System)에
요청하여 비행 허가 여부를 결정 받게 되면
, UAS
운용자에게 상태를 전달하고
, 운용할 수 있게 한
다
. UAS 운용자는 USS를 통하여 비행계획을 제출
하고
, UAS 운행 가능 여부 확인을 요청한다. 운행
중인
UAS는 감시 시스템(cell/wireless, ADS-B,
satellite Ku band, beacon based systems 등)을 통
해 자신의 현재 위치를 실시간 제공
(운행 환경에
대한 위험도에 따라 위치정보 보고 주기가 달라질
수 있음
)해야 한다. USS의 전략적 충돌 회피와 독
그림
3. UTM 시스템 구성[7]

권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
143
립적으로
UAS는 센서를 통해 실시간 다른 비행체
나 장애물을 피할 수 있어야 한다
[6].
2.1.3 프로토타입
UTM 시스템 개념 입증 및 기술 사항을 테스트
하기 위해
NASA와 FAA의 공동 연구 팀, RTT
(Research Transition Team)는 여러 업체, 학교와
협력하여
UTM Research Platform을 개발하였다
[8]. 테스트는 LVC (Live operations, Virtual
human-in-the-loop
simulations,
Constructive
autonomous batch modes) 환경에서 모두 진행되
도록 구성하였다
. 현재는 FAA ATM system과 연
동하지 않은 상태이며
, UAS operator와 USS 간의
인터렉션
, ANSP constraints 변경 여부, public과
다른
stakeholders에게 운영 화면을 제공하는데 초
점이 있다
. 개발 플랫폼은 데스크탑 용, 모바일 용
API 기반 application이며, 인터넷 cloud 상에서
이용된다
. 현재 비행체·사용자 등록, 비행 계획,
constraints 관리, conformance 모니터링 등이 개발
되어 있다
. 외부 데이터 서비스는 지형·지물 지도,
날씨
, 감시 데이터, NOTAM (NOtice To AirMen)
정보를 제공한다
. UAS 운용자는 UTM client
software application을 통해 UTM research
platform server에 접속하며, 모든 UTM clients는
동일한 표준 메시지 프로토콜을 통해
UTM
research platform과 통신하게 된다.
UTM Operator Client는 시뮬레이션 목적으로
NASA가 보유한 MACS (Multi-Aircraft Control
System) client 와 실제 field test를 위한 client가
개발되고 있으며
, MACS를 통하여 개발한 client에
는 비행 동역학
, 운용 계획서 전달, 비행체 프로파
일
, plan에 따른 자동 비행(필요 시, 수동 조종 가
능
)이 포함된다[8]. 비행 제어 화면, 지도 및 경로
현시 화면
, 메시지 윈도우로 화면이 구성된다. 이
를 통해
, 운용자는 한 대 혹은 여러 대의 드론을
운용할 수 있고
, UTM 서버로 메시지를 보내거나
받을 수 있다
.
그림
4. MACS Client 화면[8]
예를 들어
, 서버와 연결 여부 확인, 비행 정보
전송
, 비행 승인, 비행 상태 확인 등이다. 또한,
Google earth와 연동되어 비행체 움직임을 실시간
3D 영상으로 볼 수 있다. UAS 모니터링을 위한
UTM manager application으로 desktop용 UTM
application은 다음과 같은데, time-based list view,
map view로 구성된다.
그림
5. Desktop용 UTM manager 화면[8]
<그림 5>에서 왼쪽 화면이 list view이고, UTM
research platform에 등록된 현재 운행 중인 드론
리스트가 나타난다
. 필터, 정렬 기능을 이용하여
시간
, ID, 현재 운용 상태 별로 나누어 볼 수도 있
다
. 하단 messaging console을 통해 시스템 상태를
보거나
, 비행 운용자와 통신할 수 있다. 오른쪽 레
이아웃이
map view이며, 지도 위에 UAS의 현재
위치를
overlay하여 화면을 현시한다. 또한, 경로와
Geo-fencing을 볼 수 있다. 이 외에도 <그림 6>과
같은
mobile용 UTM application을 개발하여 실제
테스트에도 이용 중이다
[8].

144
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
그림
6. Mobile용 UTM manager 화면[8]
2.2 유럽 EASA
비관제 공역에서의 드론 운용을 위한 미국
UTM 개념과 달리, 유럽은 EASA의 주도 하에
UAS의 공역 통합을 목적으로 연구를 진행해 왔다.
하지만
, 저고도 비관제 공역에서의 드론 시장 활성
화로
NASA의 UTM 개념을 유럽에서도 도입하기
위한 연구가 시작되고 있다
. 현재 유럽은 UTM에
대한 정의 수립 및 연구를 시작하는 단계로 아직
명확한 운용 개념이 제시되지는 않았으나
, EASA
에서 제시한 드론 운영 개념을 토대로 하여
UTM
을 계획하고 있다
.
EASA는 드론이 운영 위험도 수준에 따라 구분
되고 관리되어야 한다는 개념 하에
“Open”,
“Specific” 그리고 “Certified” 세 개의 드론 운영
카테고리를 정의하였다
[9, 10]. 여기서 “Open”은
드론 운영에 대한 보고를 필요로 하지 않고 제한
된 공역에서만 운영하는 카테고리이고
, “Specific”
은 드론 운영에 대한 보고를 필요로 하고 운영에
특정 제한이 부가되는 카테고리이며
, “Certified”는
드론 운영에 대한 보고가 필요한 카테고리로서
, 각
각에 대한 상세한 내용은 다음과 같다
.
2.2.1 Open Category
이 카테고리는 지상 또는 공중에 미치는 위험도
가 매우 낮은 소형 드론 운영에 대한 카테고리로
서
, 상업/비상업적 운영 모두를 포함하며 감항성
이나 운영 및 조종사의 자격 증명을 별도로 필요
로 하지 않는다
. Open category에 속하는 드론 운
영은 유인 항공기 또는 사람에게 피해를 주지 않
기 위하여 다음과 같은 제한 사항을 갖는다
.
w 비행 구역 준수
w 드론 운영과 관련 없는 지상 인원으로부터의
거리 준수
w 다른 공역 사용자와 분리
w 조종사 준수사항
w
MTOW (Maximum TakeOff Weight) 25kg 미만
2.2.2 Specific Category
Specific category는 군중 상공을 비행하거나 관
제 공역에서의 운항 등
open category에 해당하지
않는 드론 운영에 대한 카테고리로서
, 추가적인 제
한과 드론의 성능 및 조종사의 자격에 대한 더욱
높은 기준이 요구된다
. Specific category의 경우
무인항공기가
VLOS (Visual Line-Of-Sight) 밖, 또
는 제한된 범위 내의 유인항공기 공역에서의 운항
이 고려되기 때문에
, 추가적인 무인항공기의 장비
또는 운영 절차를 필요로 한다
. 이러한 운영 절차
중 하나인
SORA (Specific Operation Risk
Assessment)는 해당 운영의 위험성과 위험을 감소
시키기 위한 방법들에 대한 평가 절차로서
, 다음과
같은 사항에 대한 위험 평가를 수행한 후 국가 항
공 당국에 해당 평가 정보를 제공하여야 한다
.
w 운영 구역
: 인구 밀집, 특별 보호 구역, 장애물
형상
, 기상
w 공역
: ATM에 미치는 영향, 공역 등급, 공역
분리
, 관제 절차
w 무인항공기 디자인
: 기능, 안전 기능
w 운항 종류
: 운항 절차
w 조종사 숙련도
w 운영자의 조직 인자
w 환경에 미치는 영향
또한 해당 국가의 평가 권한을 가진 기관은
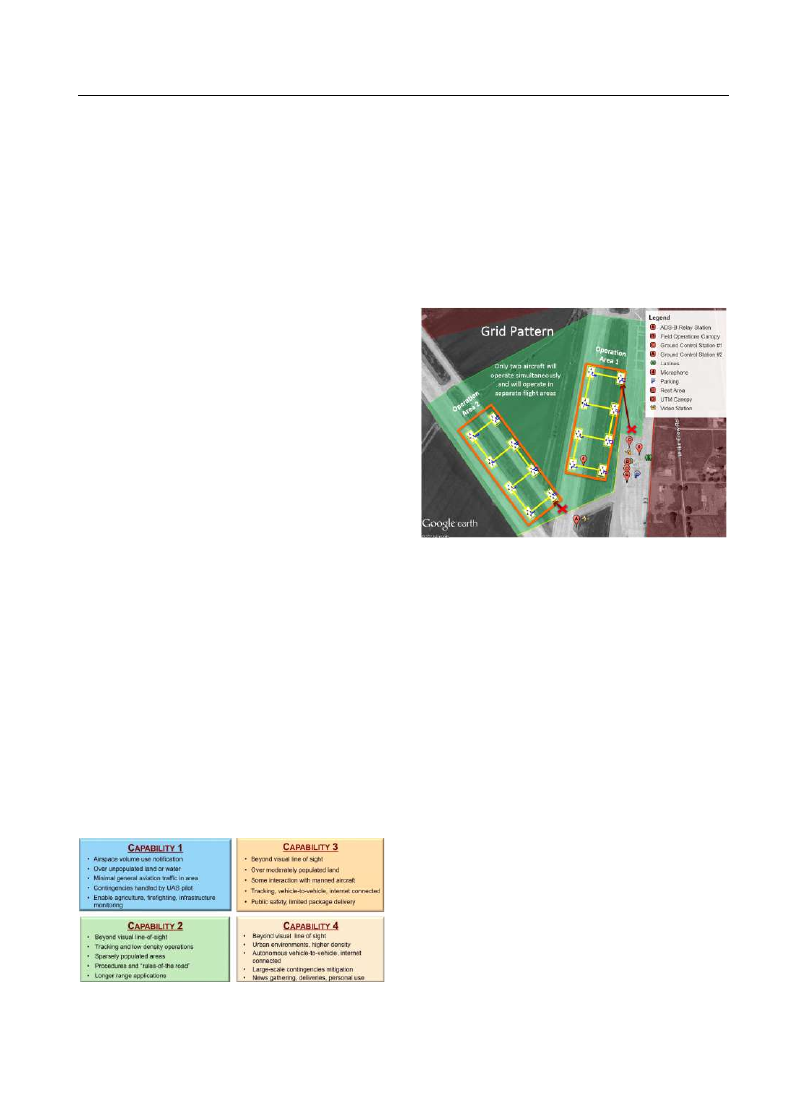
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
145
SORA의 검토를 통해 OA (Operation Authorization)
를 발부해야 하며
, 해당 specific category 드론 운영
은
OA에 제한된 범위 내에서만 운영하여야 한다.
2.2.3 Certified Category
Certified category는 open 및 specific category
에 해당하지 않는 드론 운영에 대한 카테고리로서
,
유인 항공기와 동등한 레벨의 드론 운영과 관련된
카테고리이다
.
Specific
category와 certified
category를 구분하는 명확한 구분은 아직 결정되지
않았으나
, MTOW 150kg을 초과하는 드론으로서
국가 활용이나 연구 목적 등에 포함되지 않는 운
항의 경우를 포함한다
. Certified category 운영을
위해서는 운영자가
ROC (Remote Operator
Certificate)를 소지하여야 하며, 모든 조종사가 면
허를 소지하여야 한다
. 또한 certificated category
운영을 위해서는 해당 항공기 뿐 아니라 지상 장
비 모두 현재 유인 항공기와 동일한 방식으로 감
항 증명을 발급받아야 한다
.
EASA에서 제시한 드론 운용개념 중 open
category 또는 일부 specific category는 NASA에서
제시한
UTM이 대상으로 하는 운영이라고 볼 수
있다
. 하지만 이러한 드론 운영을 위한 구체적인
교통 관리 방안은 아직 제시되지 않았으며
, Geo-fe
ncing 또는 저고도 교통에 대한 규정 등의 개념에
대한 표준화와 연구 필요성이 제기되고 있다
[10].
3. 해외 UTM 발전 로드맵
3.1 미국 NASA TCL
그림
7. UTM Technology Capability Level[6]
NASA는 저고도 공역에서 안전하고 효율적인
sUAS의 UTM에 대한 초기 운용개념 입증을 위해
‘Incremental risk-based model’에 기반한 TCL
(Technology Capability Level) 4단계를 계획하였
다
[6]. TCL 각 단계는 12-18 개월 정도이며, 다음
단계는 이전 단계의 내용을 포함하여
field test가
수행된다
.
그림
8. TCL 1단계 Field Test[11]
TCL 1단계는 2015년 8월 미 캘리포니아에 위치
한
Crows Landing Airport에서 수행되었다. 기존
민간항공기 감시를 위한 레이더
, ADS-B 뿐만 아니
라
, 저고도를 비행하는 sUAV 탐지를 위해 별도의
레이더
(SRHawk 2D low altitude radar)도 추가 활
용하였으며
, 기상 관련 장비(100ft Weather Tower,
Radiosonde System, Microwave Profiler) 등도 운
용되었다
. 시험을 위한 드론으로는 8대의 멀티로터
드론
(5 quadcopters, 1 hexacopter, 2 octocopter), 2
대의 고정익 드론을 이용하였다
. GCS (Ground
Control Station)와 UTM 시스템 간 WiFi 연결을
통해 비행계획을 보내고
, 드론이 비행계획을 따라
비행하면서 생기는
navigation 오차를 테스트 하
며
, 차기 실험에 이용할 수 있도록 다양한 실험 데
이터를 수집하였다
[11]. 또한, <그림 5>의 UTM m
anager 어플리케이션을 통해 드론의 상태를 모니
터링하고
, 메시지 전달을 하는 등의 테스트가 이루
어졌다
[11]. TCL 테스트 외에 2016년 4월 FAA를

146
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
통해
6개 테스트 지역(Alaska, Nevada, New
York, North Dakota, Texas, Virginia)을 선정하여
UTM 필드 테스트를 수행하였다. 각 지역에 4대씩
총
24대의 비행 시험을 하였고, 60대 이상의 가상
드론을
UTM 시스템에 포함하여 테스트를 수행하
였다
[7, 12]. TCL 2는 2016년 10월 수행하였는데,
해당 시험 결과는 현재 공개되지 않은 관계로 기
존에 제시된 계획에 의거하여 내용을 정리하면 다
음과 같다
. TCL 2는 이전 단계의 연장으로 가시권
밖에서의 비행을 포함하는 것을 목표로 비행 계획
을 통한 고도 분리 간격을 두면서 교통 혼잡도를
높이며 테스트한다
. 또한, UAS contingency
management 자동화 연구를 진행하며 상황에 따른
동적 판단이 반영된다
. TCL 3는 2018년 1월로 예
정되어 있다
. 협력적, 비협력적 감시 시스템을 받
는
UAS가 함께 운용되는 상황을 다룬다. TCL 4는
2019년 3월로 예정되어 있으며,
large-scale
contingencies 상황과, 도시 건물 밀집지역에서 배
달 등의 운용목적을 둔 테스트가 수행될 예정이다
.
다양한 감시시스템과
, 자동화 된 vehicle-to-vehicle
internet connection 등을 통한 운용절차 및 기술
개발에 초점이 맞추어져 있다
[6].
3.2 유럽 SESAR 2020
최근 유럽은
SESAR2020 프로젝트를 통해 저고
도 무인기 운영에 대한 연구를 추진하고 있다
[13].
SESAR는 2007년 유럽 연합에 의해 설립된 조직인
SJU (SESAR Joint Undertaking)에 의하여 수행되
는 유럽
ATM 관련 연구 개발 프로젝트이다. 현재
는
2016년 12월에 종료되는 SESAR1 프로젝트와
함께 이를 뒤잇는
SESAR2020 프로젝트가 동시에
수행되고 있다
. SESAR2020은 유럽 연합이 2014년
부터
2020년에 걸쳐 진행하고 있는 다양한 분야에
대한 연구 개발 총체인
Horizon 2020의 일환으로
진행되는 프로젝트로서
, Exploratory Research,
Industrial Research and Validation 그리고 Very
Large Scale Demonstrations 의 세 단계로 진행된
다
[13].
SESAR2020는
2016년
기준
Exploratory
Research로서
High
Performing
Airport
Operations, Optimized ATM Network Services 등
을 포함한
11개의 연구가 진행 중인데, 이에 추가
적으로 저고도 무인항공기 운영 및 기술과 관련한
연구인
SESAR2020 RPAS Exploratory Research를
추진 중이다
[13]. SESAR2020 RPAS Exploratory
Research는 RPAS (Remotely Piloted Aircraft
System)라는 용어를 사용하였지만 RPAS와 더불어
UAS를 함께 포함하고 있으며, B-VLOS (Beyond
Visual Line Of Sight)를 포함한 VLL (Very Low
Level, 500ft 미만)과 VFR (Visual Flight Rules) 하
에서의 운영과 관련된 사항을 다룬다
. SESAR2020
RPAS Exploratory Research는 두 개의 Work
Area로 나누어져 있으며, 첫 번째 Work Area는
SESAR UTM Concept Definition 이라는 하나의
주제를 다루고
, VLL에서의 드론 운영과 관련된 운
용 개념을 개발하는데 초점이 맞추어져 있다
. 이
연구에서는 레져
, 시설 감시, 농업, 도심지역 비행,
금지구역 근처에서의 비행 등 저고도에서의 다양
한 드론 운영을 고려하며
, 운영적인 부분과 함께
비상 상황 및 사회적인 이슈를 모두 다룬다
. 이 주
제에서 다루어지는 대표적인 내용은 다음과 같다
[13].
w
VLL에서 UAS/RPAS의 통제 필요성
w 도시에서의
UAS/RPAS 운영
w
VFR 운영의 자율성
w
Command & Control failure/corruption 시 운
영절차
또한 운용 개념과 더불어 다양한 드론 운영 시나
리오를 구상한다
. 특히, UTM의 운용개념을 수립하
는데 있어서 현재 진행 중인
NASA의 UTM, 그리
고
JARUS (Joint Authorities for Rulemaking on
Unmanned Systems) 등의 연구를 참고할 계획이다.
두 번째
work area는 VLL 및 VFR 드론 운영을
위한 기술적인 부분으로서
, UTM에 필요한 IT, 통
신
, 지능형 시스템, 로봇 공학 등 다양한 분야의
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
147
기술에 대한 연구를 포함한다
. 이 Work Area는
총
6개의 주제를 가지며, 각각에 대한 내용은 다음
과 같다
[14].
3.2.1 Drone information management
많은 드론과 유인 항공기가 동시에 비행하며
, 건
물과 장애물이 존재하는 복잡한 저고도 공역에서
안전하고 효율적인 드론 운영을 위해서는 항공 및
기타 시설에 대한 정확한 정보가 필수적이다
. 따라
서 이 주제에서는 현재 유인 항공기 운영을 위한
정보
, 정보의 관리 및 접근 방식을 드론이 함께 운
영될 때의 상황을 고려하여 추가 연구되어야 한다
.
또한
, 이 연구에서는 가시권 내에서 운영되는 드론
부터 장거리를 비행할 수 있는 자율 드론 까지 광
범위한 드론과
, 다양한 적용 분야가 고려된다.
3.2.2 Aircraft systems
VLL에서 드론 운영 시 적용되어야 할 기술에
대해 연구한다
. 특히, 광범위한 종류의 드론과 적
용 분야가 존재하므로
, Work Area 1과 연계하여
통신
, 항법, 감시, detect and avoid, auto pilot 등
의 기술이 고려되어야 한다
. 비 인증 항공기 등에
사용될 저비용 기술 또한 고려되어야 한다
.
3.2.3 Ground-based technology
현존하는 항행안전시설이나 통신 장비 등이 드
론에 동일한 방식으로 적용되기 어렵기 때문에
,
VLL 드론 운영을 위한 지상 기반의 기술들이 개
발되어야 한다
. 따라서 B-VLOS 운영을 포함한
UTM 운영을 위해 필요한 지상 기반 기술을 명시
하고
, 이들에 대한 기준이 연구된다. 이 연구에서
는 통신
, 항법, 감시 시스템 등의 주제가 모두 다
루어져야 하지만
, data link에 대한 사양이나 네트
워크 성능 및 스펙트럼 이슈는 다뤄지지 않는다
.
3.2.4 Data link
드론은
command and control, payload, 충돌
회피
, UTM 시스템과의 communication 등을 위한
data link를 필요로 한다. 다양한 data link 기술
중 어떤 기술이 드론 운영에 적합한지와
, 그러한
기술이 드론 수요나 운영의 공간적 범위에 적합한
지에 대한 이해가 필요하다
.
3.2.5 Security & cyber-resilience
드론 운영은 사생활 침해나 타인의 재산 등에
손해를 줄 수 있는 사회적 문제가 존재하기 때문
에 다양한 제도와 기술을 통해 개인에 대한 피해
가 최소화 되고
, 비행이 금지되어야 할 공역에 대
한 보호가 이루어져야 한다
. 따라서 다음과 같은
세 가지 영역에 대한 보안 문제가 다루어진다
.
w 드론 시스템의 보안
w 드론 시스템의 운영으로부터 제
3자의 보안
w 미션 수행 또는 공역 제한을 위한
Geo-fencing
적용
이 주제에서는 외부에서의 드론 시스템 접근 등
드론 자체의 보안과 관련된 사항과 더불어
, 테러와
같은 불법 드론 운영과 관련된 사항을 다룬다
. 또
한
제한된
공역
내에서의
운영을
위한
Geo-fencing의 경우 Work Area 1과 연계되어 연
구되어야 하며
, 여기서는 공역 분류 및 유보 및 제
한 공역을 벗어나는 것을 방지하기 위한 방안에
대해 연구된다
. 또한 공중 및 지상과 관련된 사항
을 모두 다루어진다
.
3.2.6 Science for higher levels of automation
향후 자율 비행을 위해 드론의 회피 기동 기술
이 개발되어야 한다
. 따라서 이 주제에서는 드론의
안전하고 효율적인 운행을 위해 최신 센서 및 통
신 장비들이 어떻게 사용될 수 있는지에 대해 연
구된다
. 비협력적 및 협력적 충돌 회피를 위한
data-fusion 기반의 소형 장비의 개발 뿐 아니라,
인구 밀집 지역 및 실내에서의 운영을 위한 기술
,
또는 사물 인터넷 환경과의 상호 연계성 등이 모
두 고려된다
.

148
권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
4. 결 론
저고도 무인기 교통관리 체계 구축을 위해 미
국과 유럽에서 수행 중인 내용을 로드맵과 함께
살펴보았다
. 미국에서는 NASA의 주도 하에, 비관
제 공역
(Class G)에서의 sUAS 운용을 위한 초기
UTM 체계가 마련되고 있다. 드론의 지리적, 운용
목적
, 교통 혼잡도를 고려한 위험도에 따라 단계
별 운용개념을 수립하고
, 테스트를 통해 개념을
입증 및 보완하고 있다
. 또한, UTM 시스템 구성
을 통해 알 수 있듯이
, 각 부처 이해당사자 및 기
타 운용기관 별 역할과 책임을 분담하여 전체 시
스템을 구성하고
, UAS 운용자와 UTM 시스템 간
표준화 된 정보 교환을 통해 드론이 모니터링 및
교통관리 되고 있다
. 하지만 현재 초기 단계이므
로
, 개발 로드맵을 수행함에 따라 향후 UTM 운
용 개념과 시스템이 수정 및 보완 될 수 있다고
한다
.
유럽에서는
SESAR2020
RPAS Exploratory
Research를 통해 UTM 연구 개발이 주로 진행 될
계획이며
, 다양한 드론 운용 시나리오에 기반한 운
용 개념 수립과 필요한 기술적 요소들을 마련할
예정이다
.
해외 사례를 참고함으로써 우리나라 또한 우리
실정에 맞는 저고도 무인기 교통관리 시스템을 구
축하여
, 증가하는 드론 시장에 안전하고 효율적인
운용 토대를 마련해 나갈 것을 기대해 본다
.
감사의 글
본 연구는 국가과학기술연구회에서 지원하는 주
요사업인
‘유무인기 복합항행 기반기술 연구’에 의
해 연구비 지원을 받았으며
, 이에 감사드립니다.
참고문헌
1. http://www.tealgroup.com/index.php/abou
t-teal-group-corporation/press-releases/129-t
eal-group-predicts-worldwide-civil-uas-prod
uction-will-total-65-billion-in-its-2016-uas-ma
rket-profile-and-forecast
2. 국토교통부 운항정책과 무인비행장치 관련
지침서
3. Title 14 Code of Federal Regulations (14 CFR),
Part 107
4. UTM Convention 2015
5. https://www.faasafety.gov/gslac/ALC/course_
content.aspx?cID=42&sID=505&preview=true
6. P. Kopardekar, J. Rios and John E.
Robinson III, “Unmanned Aircraft System
Traffic Management (UTM) Concept of
Operations,” AIAA Aviation, June, 2016.
7. P. Kopardekar, “Safely Enabling UAS
Operations in Low-Altitude Airspace,” Aug.
2016.
8. T. Prevot, J. Homola and J. Mercer, “From
Rural to Urban Environments:
Human/Systems Simulation Research for
Low Altitude UAS Traffic
Management(UTM),” AIAA Aviation, June,
2016.
9. EASA, Concept of Operations for Drones: A
risk based approach to regulation of
unmanned aircraft.
10. EASA, Technical Opinion, Introduction of a
regulatory framework for the operations of
unmanned aircraft.
11. J. Rios, M. Johnson and T. Prevot, “UTM
Brief to Partners,” Oct. 2015.
12. https://www.nasa.gov/feature/ames/first-
steps-toward-drone-traffic-management
13. SJU Annual Work Programme 2016
14. https://ec.europa.eu/research/participants

권지현 외 / 항공우주산업기술동향 14/2 (2016) pp. 138~149
149
/portal/desktop/en/opportunities/h2020/c
alls/h2020-sesar-2016-1.html#c,topics=callId
entifier/t/H2020-SESAR-2016-1/1/1/1/def
ault-group&callStatus/t/Forthcoming/1/1/
0/default-group&callStatus/t/Open/1/1/0
/default-group&callStatus/t/Closed/1/1/0
/default-group&+identifier/desc

항공우주산업기술동향 _ 제14권 제2호
Current Industrial and Technological Trends in Aerospace
•
발행인 조광래
•
편집인 황진영
•
발행처 한국항공우주연구원
•
주 소 대전시 유성구 과학로 169-84
•
전 화 (042)870-3686
•
팩 스 (042)860-2015
•
인쇄일 2016년 12월 1일
•
발행일 2016년 12월 1일
•
정기간행물 등록번호 대전사01013
•
등록일 2003년 10월 31일
•
전자저널 www.library.kari.re.kr
•
인 쇄 동인문화사(042)631-4165
안이기 항공연구본부
김동민 항공연구본부
최홍택 위성연구본부
조상연 한국형발사체개발사업본부
신한섭 나로우주센터
김해동
융합기술연구본부
임효숙 국가위성정보활용지원센터
김성겸 항공우주제품보증센터
허문범 위성항법·응용기술센터
김종범 미래전략본부
편 집 위 원
정기간행물 등록번호 유성사00001
3686,
