수요처 및 권리현황
적용처
출원(등록)번호
비고
1320337
한국
기술 수요
발명의 명칭
· 무인항공기 장비 제조 社
· HMD 개발 제조 社
· 로봇, 자동차용 카메라
개발 社
· 항공기 카메라 영상 분야
· HMD 분야
· 로봇, 자동차용 카메라 분야
위치 및 자세 추정시스템
기술수준
■ 기술개념확립
□ 연구실환경검증
□ 시제품제작
□ 실제환경검증
□ 신뢰성평가
□ 상용품 제작
□ 사업화
시장전망
* 세계 HMD 시장 2011년 3억 4천만
달러에서 2019년 93억 달러로
성장 전망
기술문의
주 연구원
한국항공우주연구원 성과확산실
조문희 선임, 김일태 선임
042-860-2272, 042-870-3673
moonyxp@kari.re.kr
magickit@kari.re.kr
박무혁 박사
개발현황
기술내용
수요처
추가기술정보
권리현황
2013.10.15 국내 특허등록 완료
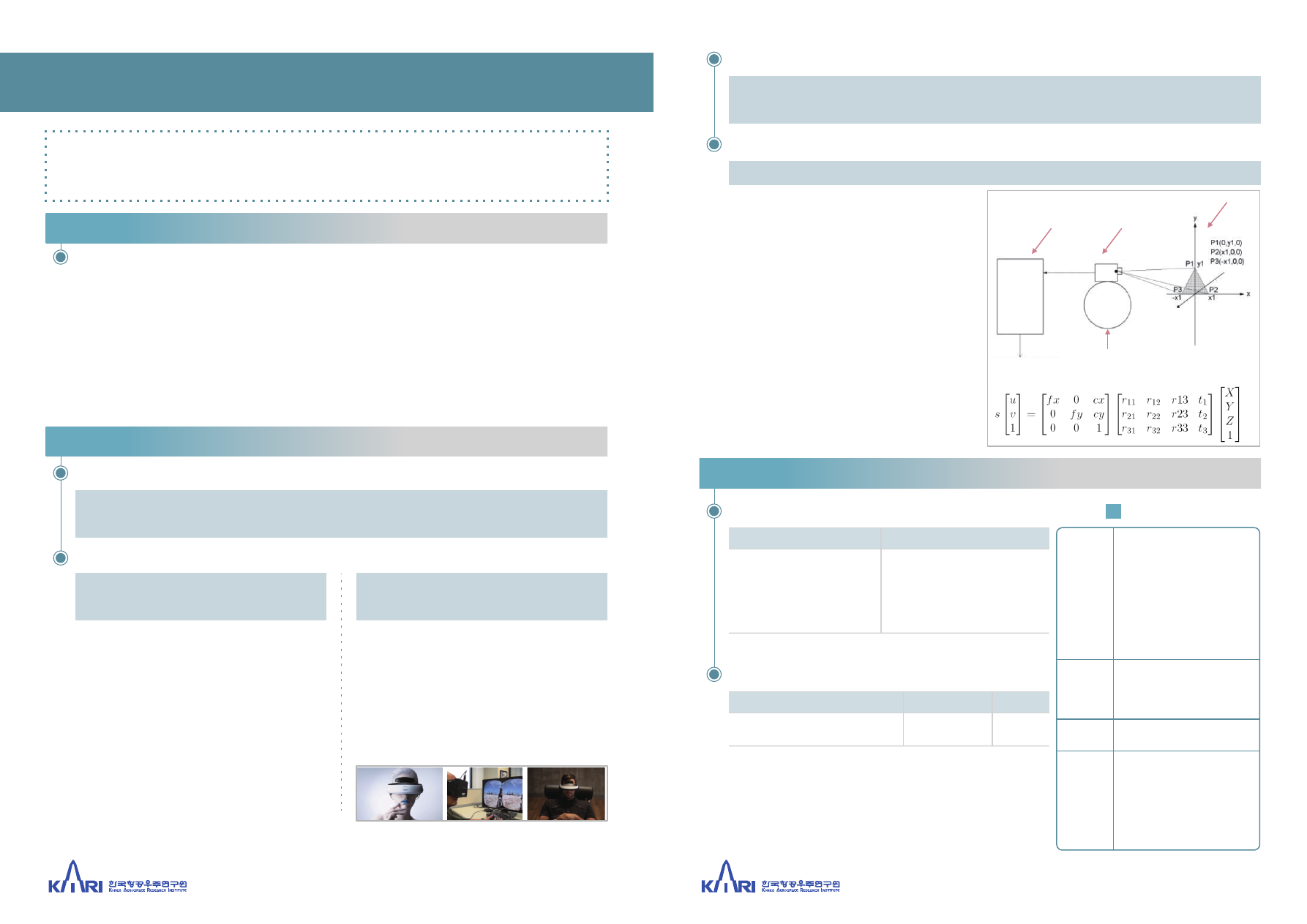
위치 및 자세 추정시스템의 구성
• 표지
- 2차원 공간 또는 3차원 공간에서의 각각의
좌표를 알고 있는 적어도 3개의 특징점
(P1.P2. P3)을 포함
• 카메라
- 적어도 3개의 위치추정 특징점(P1, P2, P3)
들의 상대적 위치를 촬영, 영상 및 영상
좌표(u,v) 획득
• 신호처리장치
- 임의의 기준점과 카메라에서 촬영된 영상에
포함된 적어도 3개의 위치추정 특징점의
상대적 위치를 이용하여 카메라의 위치 및
자세를 추정
* 영상좌표(u, v)와 특징점 좌표(X, Y, Z)
카메라위치/자세 출력
헬멧 또는 안경
카메라영상
신호처리부
카메라
표지
카메라 영상을 이용한 헬멧의 자세 및 위치 측정 장치
기/술/개/요
카메라 영상으로 3개 이상의 특징점들을 포함하는 표지의 특징점들을 식별/추적하여,
카메라가 장착된 헬멧 또는 안경의 상대위치 및 자세를 추정하는 시스템
기존 기술의 문제점
차별성 및 효과
차별성
기술적 효과
경제적 효과
적어도 3개의 특징점과 기준점의 상대적 위치의 변화를 이용하여
위치 및 자세를 추정하므로 연산량이 적으며 오차의 누적이 없음
위치 및 자세계산의 연산량 작음
정밀도 高 , 누적오차 無
무인 항공기, 자동차 및 로봇 등
다양한 분야에 활용 가능
• 가상현실에 사용되는 HMD
(Helmet Mounted Display) 등에 적용하여 활용 가능
- 사람 머리의 위치 및 자세에 따라, HMD에 3차원
영상(가상현실)을 시현시킴으로써, 가상현실의
몰입감 및 현실감 증대
• 원격조정시 무인항공기, 자동차 및 로봇에 탑재된
카메라의 제어 등 다양한 분야에 활용 가능
• 적어도 3개의 특징점과 기준점의 상대적 위치의
변화를 이용하여 위치 및 자세를 추정하므로
연산량이 적음
• 표지판의 특징점을 기준으로 매 단위시간 마다
카메라의 위치 및 자세를 계산하여 누적오차 없음
• 광학을 이용하므로 정밀도가 높음
종래의 자세측정센서로는 가속도계 또는 가속도 센서(Rate Gyro) 등 관성센서를
이용하여 가속도와 각속도를 측정, 누적(적분)함으로써, 위치 및 자세를 추정함
- 적분방식을 사용하므로, 오차의 누적이 발생하며, 장시간 사용 시, 허용오차 범위를 초과
하므로 칼만필터 등을 이용하여 GPS 등 타 센서와 융합 필요
- 또한 계산상으로 복잡하여 단순히 소프트웨어로 이를 수행할 경우 속도에 문제가 발생
하고, 하드웨어로 구현할 경우 하드웨어가 시스템에서 차지하는 면적 및 비용 발생
- 41 -
- 42 -
