4차 산업혁명 기술의 집약체, 무인이동체
무인이동체
다양한 무인이동체 기술 개발
무인이동체는 사람의 도움없이 스스로 외부환경을 인식해 상황을 판단하고 임무를 수행하는 이동체로 드론이 대표적이다. 사람이 장시간에 걸쳐서 해야 하는 일을 대신할 수 있어 농업, 운송 등 다방면에서 새로운 성장동력을 창출할 것으로 예상된다. 한국항공우주연구원은 무인이동체 수요급증에 대응하기 위해, 다양한 종류의 무인이동체에 공통으로 적용할 수 있는 무인이동체 공통원천기술과 육해공 복수환경에서 고차원적 통합운용이 가능한 기술실증기 개발을 지원하고 있다. 또한 저고도 무인기의 교통을 감시·관리하는 저고도무인비행장치 교통관리 감시기술 개발을 지원하고 있으며, 소형무인기 성능향상을 위한 소형무인기 기반기술 및 공공혁신조달 연계 소형무인기 기술을 지원하였다. 여러 대의 서로 다른 무인이동체가 서로 협력하거나 분리·합체하는 등 통합 운용을 위한 시스템 개발을 통해 차세대 무인이동체 시장을 선점할 수 있는 혁신적 원천기술을 확보하고 기술경쟁력을 높이는 것이 주요 목표이다.관련 기업체 기술이전 대상도 확대
한국항공우주연구원은 무인이동체 기업이 지속적으로 늘어나고 있는 만큼 사업 추진 중에 기업의 기술이전 수요를 정기적으로 발굴하여 기술이전 대상을 점진적으로 확대하고 있다. 또 타 부처에서 추진하는 상용화, 기술사업화, 창업지원 사업 등과 연계하여 사업의 원천기술이 제품 및 서비스로 구현되도록 지원 및 활용할 계획이다.고차원적인 지능형 임무 수행이 가능한 무인이동체의 수요가 급성장할 것으로 예상됨에 따라 운용 환경의 제약을 극복할 수 있는 통합운용 개발을 통한 차세대 시장 선점 및 혁신적인 기술 확보에 주력할 방침이다.무인이동체
다수·이종 간 상호 운용성 확보
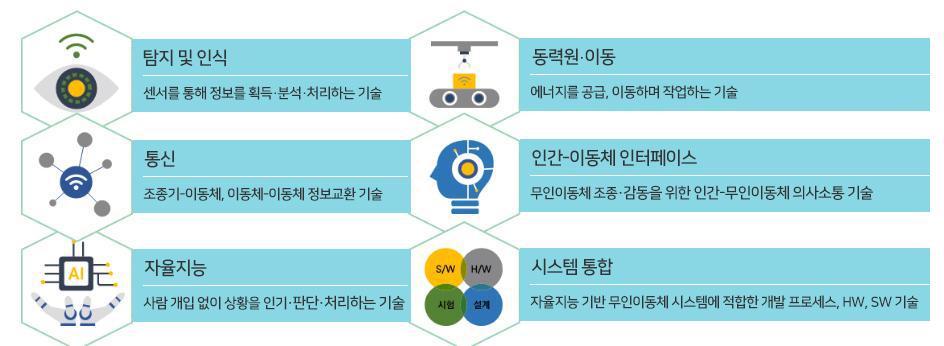
임무 맞춤형 고성능 무인이동체 개발 및 다수·이종 간 상호 운용성 확보 등을 위해 육·해·공 무인이동체에 공통으로 적용할 수 있는 6대 무인이동체 공통 원천기술을 개발하고 있다. 공통 원천기술은 획득 및 분석·처리, 조종기-이동체, 이동체-이동체 간 정보교환 기술, 상황 인지·판단·처리 기술, 에너지를 공급하고 이동하며 작업하는 기술 등이다. 한국항공우주연구원은 이를 위해 실내·非가시권 등 운용을 위한 탐지 및 인식의 정밀 항법·항행 기술을 개발하고, 기술력이 열악한 이동체용 통신 분야의 원천기술 확보에 주력하는 동시에 불법행위 방지 기술 개발을 통한 통신의 운용 안전성·신뢰성을 제고한다.
또한, 무인이동체 스스로 상황을 판단하고 임무를 수행하기 위한 상황인식 기술 등을 우선 개발하고 이동체 간 협력 기술도 장기적 목표로 개발하며(자율지능), 무인이동체용 경량·고효율 전기구동장치 개발 및 서로 다른 동력원 간 결합을 통한 분산전기추진시스템 등 동력원 및 이동의 신개념 기술 개발에 나서고 있다.
이와 함께 상호작용 정도에 따라 조종·감독·협업 단계로 구분하고 조종방식 개발에서 협력 기술 개발로 순차적 추진하며(HMI) 무인이동체에 자율지능 등 신기술을 쉽게 적용·검증할 수 있는 개발체계 연구와 시스템 통합을 위한 신개념의 무인이동체 하드웨어를 개발하고 있다.

- 목표다양한 무인이동체 공통 적용 원천기술 개발
- 관련기술탐지 및 인식, 통신, 자율지능, 동력원 및 이동, HMI, 시스템 통합
통합운용 무인이동체 기술실증기 개발
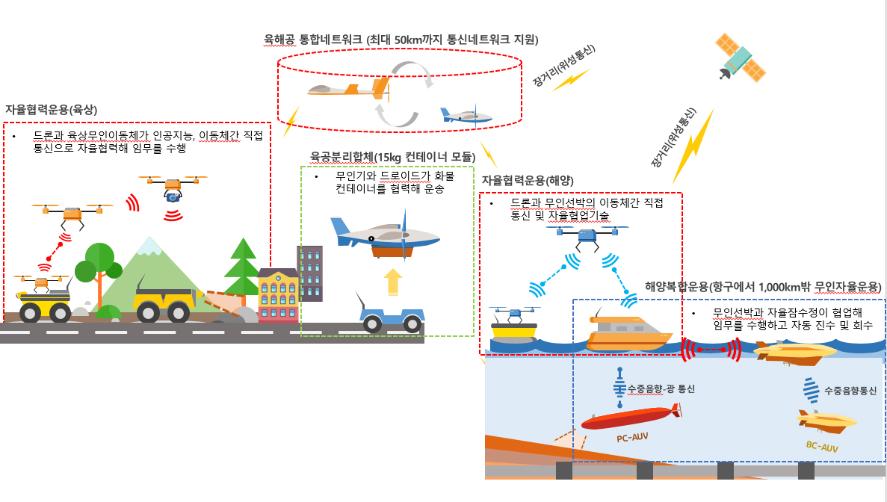
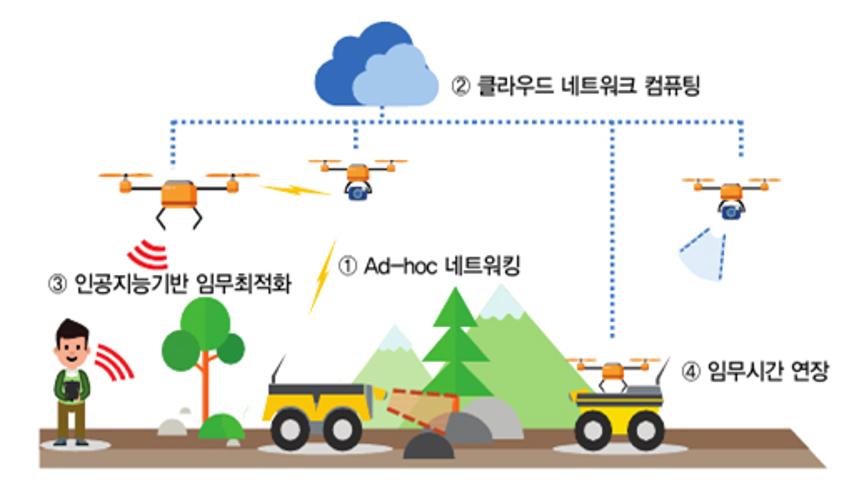
글로벌 시장을 주도할 미래 기술·사회적·문화적 변화를 반영한 차세대 무인이동체 기술을 개발하고 있다. 자율협력형 무인이동체 연구를 통해 육해공 영역에서 이종환경간 통합운용을 위한 기술기반을 구축한다. 육상, 해양, 공중의 무인이동체는 지상이나 해상의 고정된 통신 인프라에 의존하지 않고, 이종의 무인이동체간 직접 통신을 통해 네트워크를 구성하며, 자율지능형 군집운용 기술에 의해 부여받은 공통적인 임무를 인간 운용자의 도움 없이 무인이동체간 협력하여 수행한다.
육공복합형 무인이동체 연구를 통해 이기종간 분리합체를 포함한 정밀협업기술을 개발한다. 육상과 공중의 무인이동체는 도킹-언도킹 복합운용을 통해 24시간 자율 무인배송 시스템 구축과 같은 임무가 가능하다. 장거리 운송용 무인항공기는 수직이착륙 및 고정익 모드 순항이 가능하고, 단거리 배송용 육상 드로이드는 도심 내 자율주행을 통한 최종 목적지 배송이 가능하다.
해양복합형 무인이동체 연구를 통해 수상과 수중에서 통합운용되는 기술을 개발한다. 무인선과 동력형 무인잠수정, 부력형 무인잠수정으로 구성되며, 무인선과 무인잠수정간 진수 및 회수 기술, 다중 통신 네트워크 구성, 장기간 운용을 위한 수소연료전지 하이브리드 동력원, 해양 무인이동체간 자율협업기술 등을 개발하며, 이를 통해 수상-수중 광역 복합 임무 수행이 가능하다.
- 목표고차원적 임무수행을 위해 육해공 복수환경 병용, 이종다수 무인이동체 간 협력 등 통합운용 기술실증기 개발
- 관련기술자율협력형 육해공 무인이동체, 육공 분리합체형 무인이동체, 수상-수중 복합형 무인이동체 기술
소형무인기 관련 중소기업 기술역량 강화
소형무인기 성능 향상을 위한 기반기술을 개발·보급하여 중소기업의 기술역량 확충을 지원하고 소형무인기 활용 및 서비스 초기 시장 창출을 위한 신개념·고성능 기술 및 부품을 개발, 활용·서비스 기술의 실용화 지원에 나서고 있다. 이를 위해 한국항공우주연구원은 중소 및 벤처기업이 소형무인기 개발 시 시행착오 및 개발 비용, 개발 기간을 줄여 시장경쟁력을 높일 수 있도록 드론 추진시스템 설계 및 성능 예측, 악기상 대처기술, 임무컴퓨터 활용 방법 등의 기술을 보급했다. 또 멀티콥터형 소형무인기 성능해석 초기 설계 프로그램 CLOUDS를 무상 공개하고 배포했다.공공기관 수요 바탕 고성능 시스템 개발
이와 함께 정부 부처 및 공공기관의 소형무인기 활용 수요를 바탕으로 신개념, 고성능 소형무인기 시스템을 개발했다. 특히 과학기술정보통신부와 조달청 간의 공공혁신조달 연계 소형무인기 기술개발 지원체계 구축을 기반으로 소형무인기 분야 중소 및 벤처기업의 기술개발 성과가 매출로 연계되어 초기시장을 창출할 수 있도록 지원하였다. 소형 무인기 분야 기술개발 지원과 공공조달 연계를 통해 단기간 내에 국내 소형 무인기 기술경쟁력을 제고하고 관련 산업을 활성화하기 위해 통합기술관리 및 기술을 확산했다. 또한 사업단 주관으로 위 분야별 과제에 대해 현장 수요에 기반한 요구도를 제시하고 각 과제를 유기적으로 연계한 통합 관리 및 조정을 실시했다. 이 밖에도 연구 성과의 평가 및 통합 실증·시현을 통해 현장 적용성을 제고하고 중소기업의 애로기술 지원 및 기술 이전·확산을 통해 사업화 지원에 나섰다. 이러한 사업을 바탕으로 총 9개 과제를 발굴해 지원했으며, 2018년 12월 군사용 다목적 국방 무인비행시스템, 2019년 8월 소형무인기 탑재형 실시간 기상관측용 복합 센서 및 영상시스템, 적조 및 해상오염 감시용 하이브리드형 무인기시스템, 2020년 7월, 해안안전지도 맵핑용 하이브리드형 무인기시스템이 조달청 우수조달물품으로 지정되어 공공조달시장 진입의 성과를 거두었다.- 목표소형무인기 성능 향상을 위한 기반기술을 개발·보급
- 관련기술드론 추진시스템 설계 및 성능 예측, 악기상 대처기술, 임무컴퓨터활용방법 기술, 멀티콥터형 소형무인기 성능해석 초기 설계 프로그램
연구과제 관리, 성과 검증 등 다양한 활동
한국항공우주연구원의 무인이동체사업단은 무인이동체 핵심기술개발사업의 총괄주관기관으로 연구과제 전담관리, 성과 기술검증, 성과관리, 사업홍보, 국제교류·협력, 정부정책 수립 지원 등 다양한 활동을 펼쳤다. 이를 바탕으로 그동안 특허출원 110건, 특허등록 28건, SCI 논문 60편을 포함한 논문 게재·발표 368편, 시제품 제작 64건, 기술실시계약 6건 등의 연구 성과를 창출했다. 후속사업으로 무인이동체 원천기술개발사업을 2020년부터 시작하여, 공통원천기술 분야 6개 연구단, 통합운용 기술실증기 분야 3개 연구단을 지원하고 있다.
또한 2017년부터 국내 최초로 무인이동체 산업체에 대한 실태조사를 매년 시행하고 있다. 정부 정책 수립 지원을 위해 산업체 구성, 매출, 지역 분포, 인력, 투자, 지식재산권 등의 다양한 조사항목을 설문조사해 보고서로 발간, 유관기관에 제공한다. 이와 함께 '무인이동체 기업 디렉토리'를 연감 방식으로 발간해 매년 각종 전시회나 콘퍼런스 등에서 무상 배포하여 산업체 간 정보 수집과 공유를 통한 정보구심점 역할을 하고 있다.
- 연구성과특허출원 110건, 특허등록 28건, 논문 게재·발표 368편(SCI 논문 60편 포함), 시제품 제작 64건, 기술실시계약 6건
항공교통의 효율성·안정성 제고
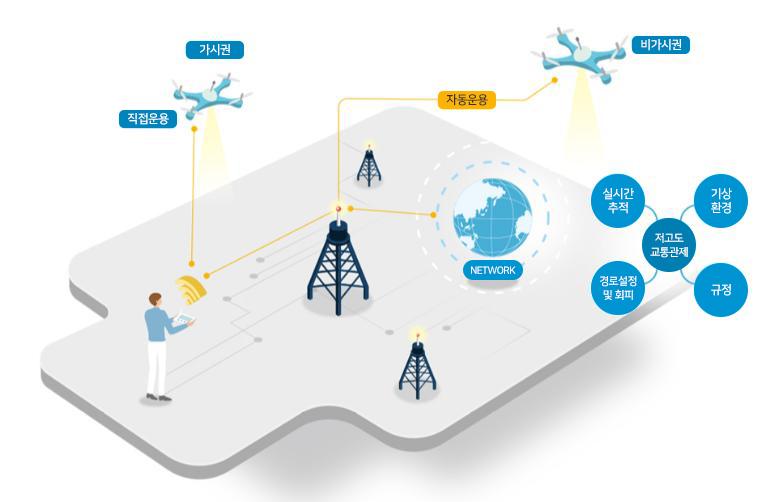
무인비행체 기술의 발전에 따라 민수와 공공분야 활용이 증대되고 비행 수요가 급격히 증가함에 따라 항공교통의 효율성과 안전성을 제고하기 위한 새로운 제도와 기술 개발을 요구받고 있다. 한국항공우주연구원은 저고도 교통관리 체계를 위한 보안 및 무인비행장치 핵심기술을 개발하고 있다. 복수의 비행장치의 효율적이고 안전한 활용을 위한 교통관리체계 기술 실증을 위한 정밀항법 기술 개발을 통한 저고도 공역의 교통관리 체계 실증이 주요 목표이다.
또한, 무인비행장치 간 직접 정보교환을 위한 탑재장치를 개발하고, 교통관리 체계 보안기술을 통해 교통관리 체계의 해킹 방지 및 비인가 무인비행 장치의 탐지 및 불법 행위 억제기술을 개발하고 있다.
저고도 교통관제 시스템을 구성하려면 무인기 조종자 및 사용사업자 등록 시스템, 무인기를 추적 감시하고 교통흐름을 관리할 클라우드 기반의 중앙 컴퓨터 시스템, 개인이나 사용사업자 등 무인기 운용자가 언제 어디서나 접속하여 비행계획을 제출하고 승인받을 수 있게 해 주는 사용자 접속 시스템, 드론과 교통관리 시스템을 연결할 드론 교통관리용 무선통신망이 필요하다.
무인비행체 안전 운용을 위한 저고도 교통관리체계 개발 및 실증시험 연구개발 사업은 2017년 4월에 착수하여 현재 2단계 사업이 진행 중이다. 2020년에는 2단계 중간 성과로 보안 기능이 탑재된 LTE 통신 모듈을 탑재한 9대의 소형 드론들의 정밀항법 비행을 실증하였다. 2단계인 2022년 말까지는 비가시권 다수의 드론 비행과 공역관리, 교통관리를 하는 클라우드 기반의 시스템 기술을 선보일 계획이다.
- 목표저고도 교통관리체계를 위한 보안 및 무인비행장치 핵심기술 개발
- 관련기술저고도 공역의 교통관리 체계 실증, 소형·경량·소출력 단말장치, 교통관리체계 보안기술
